



前言
Apollo5.0要求:
- 系统版本在ubuntu16.04或ubuntu16.04以上
- NVIDIA驱动>=410.48 Driver Download 一般ubutun上自带了NVIDIA驱动,可在Setting->Software&Update->Additional Driver里查看;或者根据这个说明下载Apollo内核跟英伟达驱动
- 安装NVIDIA-docker 2.0,参考这个链接,或使用百度的脚本
系统配置
- ubuntu18.04
- X86_64架构
- CUDA10.0
参考链接
https://github.com/ApolloAuto/apollo
https://github.com/ApolloAuto/apollo/blob/master/docs/howto/how_to_build_and_release.md
https://docs.docker.com/install/linux/docker-ce/ubuntu/
操作步骤
一、下载Apollo源码
git clone https://gitee.com/Tengyun_Mo/apollo.git --depth 1
cd apollo
git fetch --unshallow
git pull
说明:以上步骤是为了解决下载源码失败总结的步骤,详细信息参考链接
二、编译Apollo源码
1. 安装Docker
(1) 卸载旧版本的Docker
sudo apt-get remove docker docker-engine docker.io containerd runc
(2) 用软件仓库来安装Docker
详细内容参考官方链接
- 设置软件仓库
$ sudo apt-get update
$ sudo apt-get install \
apt-transport-https \
ca-certificates \
curl \
gnupg-agent \
software-properties-common
$ curl -fsSL https://download.docker.com/linux/ubuntu/gpg | sudo apt-key add -
$ sudo apt-key fingerprint 0EBFCD88
$ sudo add-apt-repository \
"deb [arch=amd64] https://download.docker.com/linux/ubuntu \
$(lsb_release -cs) \
stable"
- 安装 DOCKER ENGINE - COMMUNITY
$ sudo apt-get update
$ sudo apt-get install docker-ce docker-ce-cli containerd.io
$ apt-cache madison docker-ce
docker-ce | 5:18.09.1~3-0~ubuntu-xenial | https://download.docker.com/linux/ubuntu xenial/stable amd64 Packages
docker-ce | 5:18.09.0~3-0~ubuntu-xenial | https://download.docker.com/linux/ubuntu xenial/stable amd64 Packages
docker-ce | 18.06.1~ce~3-0~ubuntu | https://download.docker.com/linux/ubuntu xenial/stable amd64 Packages
docker-ce | 18.06.0~ce~3-0~ubuntu | https://download.docker.com/linux/ubuntu xenial/stable amd64 Packages
...
$ sudo docker run hello-world //测试docker是否安装成功
(3)使用post-installation steps for Linux测试Docker
2. 编译Apollo
以下步骤需在apollo文件下运行
bash docker/scripts/dev_start.sh //启动container
bash docker/scripts/dev_into.sh //进入container
bash apollo.sh build
3. 启动并运行Apollo
以下步骤需先进入container
- 开启module monitor
bash scripts/bootstrap.sh
- 在浏览器里登录网址http://localhost:8888/
你会看到
- 回放demo
需先下载demo链接,然后将下载的demo放在下面命令的路径下
# You can now replay this demo "record" in a loop with the '-l' flag
cyber_recorder play -f docs/demo_guide/demo_3.5.record -l
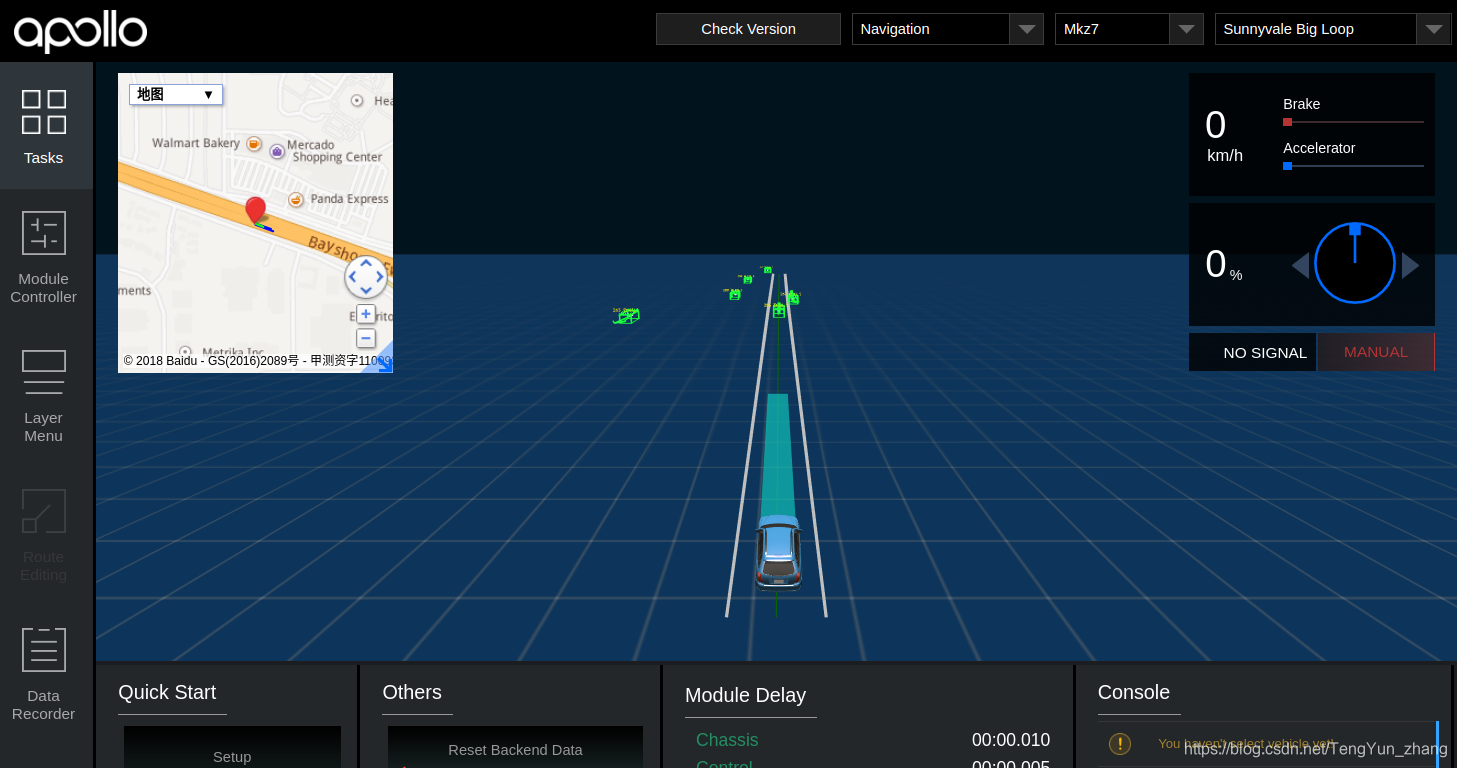
选择navigation模式
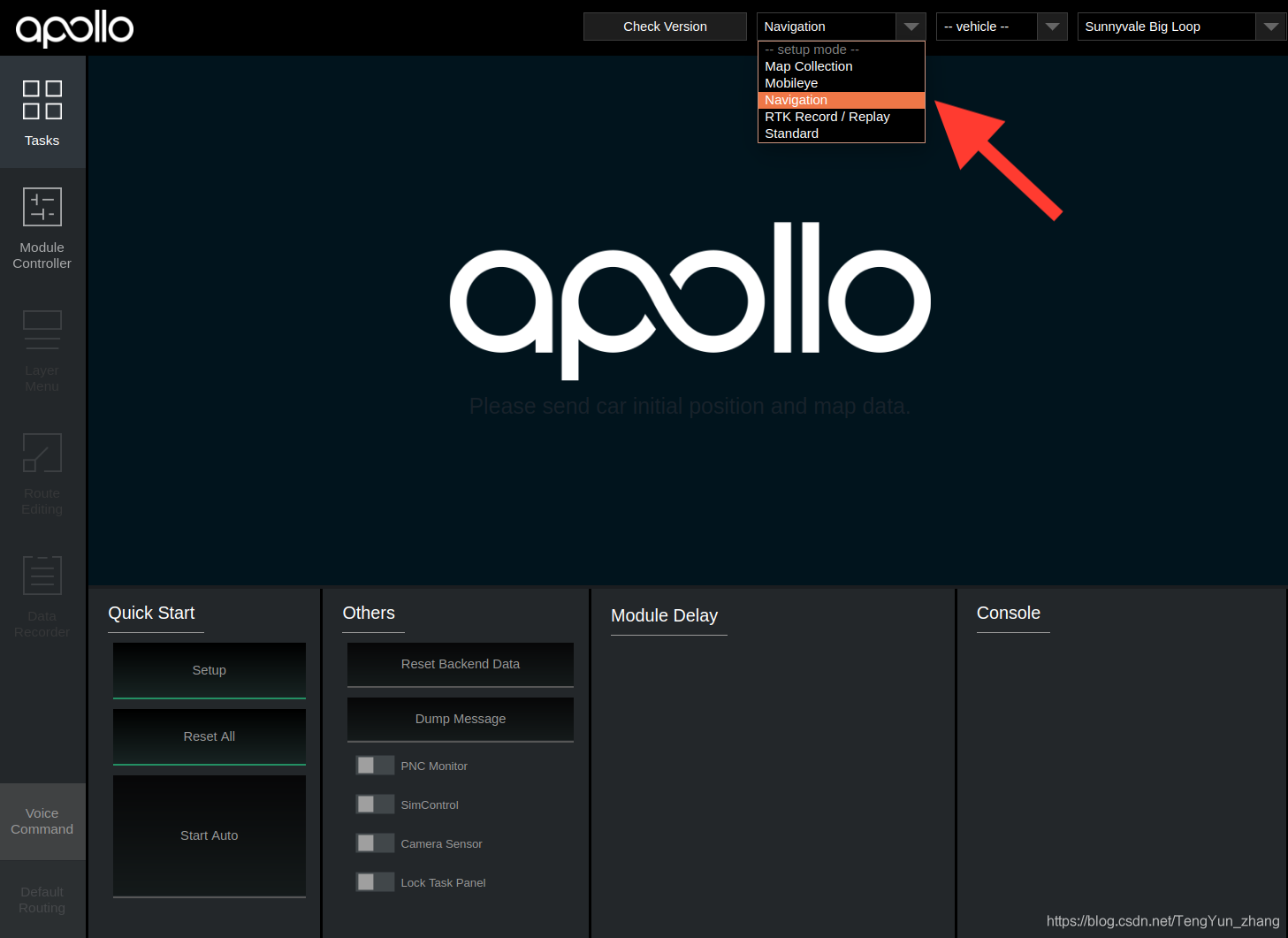
你会看到


















 1351
1351

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









