




 文章介绍了C语言中用于比较字符串的strcmp函数,展示了其函数原型和工作原理。通过示例代码解释了如何自定义实现strcmp函数,并在main函数中进行测试,验证了字符串相等的情况。
文章介绍了C语言中用于比较字符串的strcmp函数,展示了其函数原型和工作原理。通过示例代码解释了如何自定义实现strcmp函数,并在main函数中进行测试,验证了字符串相等的情况。
C语言基础语法第七章字符串 demo9_strcmp字符串比较函数的使用及实现
strcmp 字符串比较函数
函数原型:int strcmp(const charstr1,const charstr2)
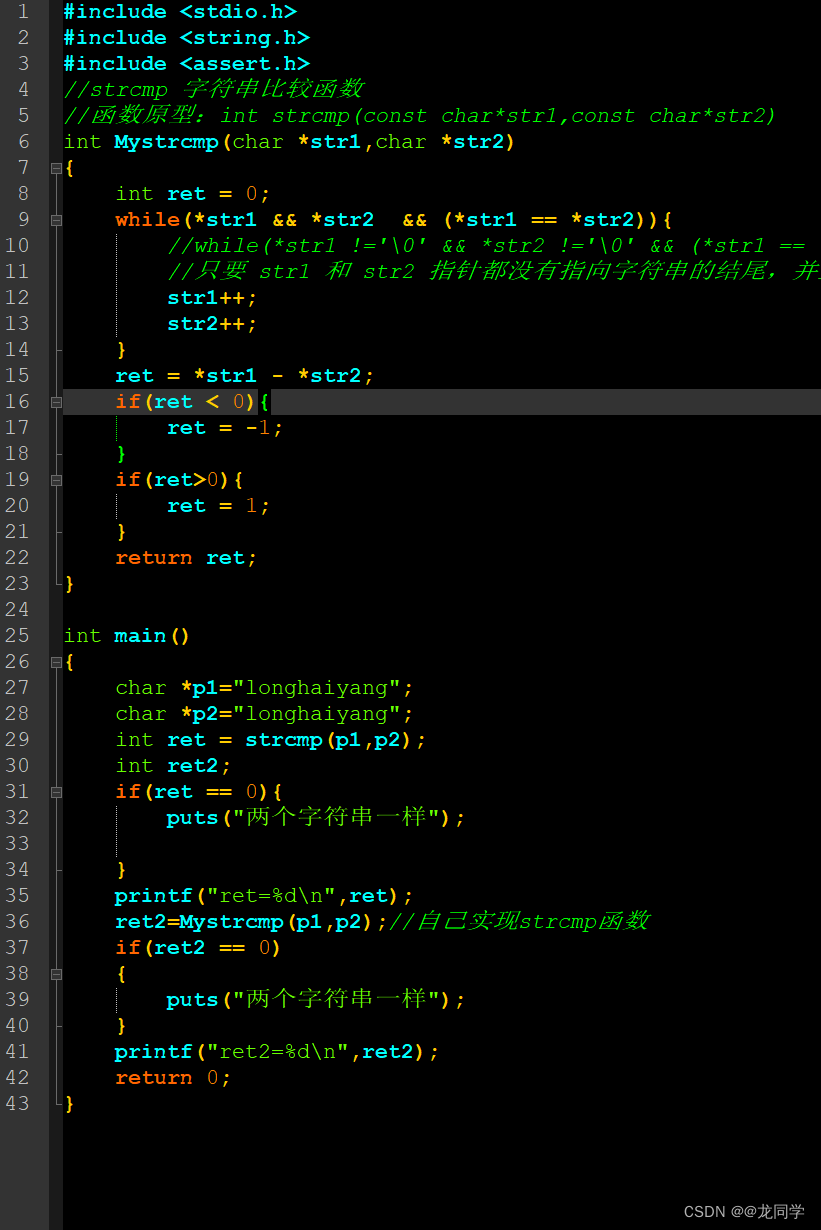
#include <stdio.h>
#include <string.h>
#include <assert.h>
//strcmp 字符串比较函数
//函数原型:int strcmp(const char*str1,const char*str2)
int Mystrcmp(char *str1,char *str2)
{
int ret = 0;
while(*str1 && *str2 && (*str1 == *str2)){
//while(*str1 !='\0' && *str2 !='\0' && (*str1 == *str2))
//只要 str1 和 str2 指针都没有指向字符串的结尾,并且它们指向的字符相等,就会继续执行循环体内的代码
str1++;
str2++;
}
ret = *str1 - *str2;
if(ret < 0){
ret = -1;
}
if(ret>0){
ret = 1;
}
return ret;
}
int main()
{
char *p1="longhaiyang";
char *p2="longhaiyang";
int ret = strcmp(p1,p2);
int ret2;
if(ret == 0){
puts("两个字符串一样");
}
printf("ret=%d\n",ret);
ret2=Mystrcmp(p1,p2);//自己实现strcmp函数
if(ret2 == 0)
{
puts("两个字符串一样");
}
printf("ret2=%d\n",ret2);
return 0;
}

















 538
538

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









