




 本文主要介绍了SSM框架的常见错误及解决办法。包括IDEA报错,原因是jdbc驱动版本不匹配;mapper.xml未放在resources文件夹下,需在pom.xml添加注解;出现404错误;逆向工程未生成主键相关方法,更改mysql驱动到5.x可解决。
本文主要介绍了SSM框架的常见错误及解决办法。包括IDEA报错,原因是jdbc驱动版本不匹配;mapper.xml未放在resources文件夹下,需在pom.xml添加注解;出现404错误;逆向工程未生成主键相关方法,更改mysql驱动到5.x可解决。
错误1
这个bug相当诡异啊, 它诡异在IDEA的报错信息只有一句话: SEVERE: One or more listeners failed to start. Full details will be found in the appropriate container log file;
并无其他显式:
最终错误原因jdbc驱动版本不匹配
错误2
错误丢失,待补充
原因:
mapper.xml没有放在resources文件夹下,需要在pom.xml中添加此注解
<resource>
<directory>src/main/java</directory>
<includes>
<include>**/*.xml</include>
</includes>
<filtering>true</filtering>
</resource>
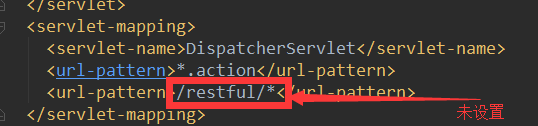
错误3


出现404-------
错误4
逆向工程中没有生成主键相关方法
解决mysql驱动需要5.x,更改后方可以解决

















 1411
1411

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









