






车间产线作业流程合规检测系统通过在车间内安装多个高清摄像头,车间产线作业流程合规检测系统实时捕捉工人在产线上的操作行为。系统可以自动检测工人在生产过程中是否按照正确的顺序执行任务,是否使用正确的工具,是否遵守安全规定等。如果系统检测到工人的操作行为违规,它可以立即向管理人员发送警报或停止机器运行,以避免进一步的损失和危险。同时,系统还会检测工人是否佩戴了必要的安全装备,如安全帽、防护手套等,以及是否在操作过程中采取了正确的安全姿势。一旦发现违规行为,系统不仅会向管理人员发送警报,还可以根据预设的安全策略,立即停止相关机器的运行,防止事故的发生,保护工人的人身安全。
YOLOv5算法具有4个版本,具体包括:YOLOv5s、YOLOv5m、YOLOv5l、YOLOv5x四种,本文重点讲解YOLOv5s,其它的版本都在该版本的基础上对网络进行加深与加宽。
- 输入端-输入端表示输入的图片。该网络的输入图像大小为608*608,该阶段通常包含一个图像预处理阶段,即将输入图像缩放到网络的输入大小,并进行归一化等操作。在网络训练阶段,YOLOv5使用Mosaic数据增强操作提升模型的训练速度和网络的精度;并提出了一种自适应锚框计算与自适应图片缩放方法。
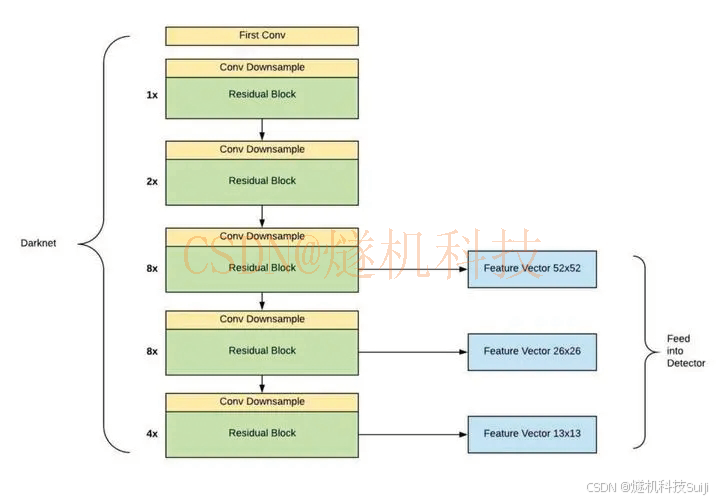
- 基准网络-基准网络通常是一些性能优异的分类器种的网络,该模块用来提取一些通用的特征表示。YOLOv5中不仅使用了CSPDarknet53结构,而且使用了Focus结构作为基准网络。
- Neck网络-Neck网络通常位于基准网络和头网络的中间位置,利用它可以进一步提升特征的多样性及鲁棒性。虽然YOLOv5同样用到了SPP模块、FPN+PAN模块,但是实现的细节有些不同。
- Head输出端-Head用来完成目标检测结果的输出。针对不同的检测算法,输出端的分支个数不尽相同,通常包含一个分类分支和一个回归分支。YOLOv4利用GIOU_Loss来代替Smooth L1 Loss函数,从而进一步提升算法的检测精度。
在现代制造业中,车间产线的高效、安全运行是企业核心竞争力的重要体现。随着人工智能技术的飞速发展,基于深度学习算法的自动化检测系统逐渐成为保障生产流程合规的关键工具。本文将介绍一种基于 YOLOX+RNN 深度学习算法的车间产线作业流程合规检测系统。在实际应用中,系统能够自动检测工人是否使用正确的工具。例如,在机械加工车间,工人需要按照规定使用特定的扳手、量具等工具。系统通过 YOLOX 检测到工人手中的工具,并结合 RNN 判断该工具是否适用于当前的操作步骤。如果工人使用错误的工具,系统会立即发出警报,提醒工人纠正错误。
# 根据配置的.yaml文件搭建模型
class Model(nn.Module):
def __init__(self, cfg='yolov5s.yaml', ch=3, nc=None): # model, input channels, number of classes
super(Model, self).__init__()
if isinstance(cfg, dict):
self.yaml = cfg # model dict
else: # is *.yaml
import yaml # for torch hub
self.yaml_file = Path(cfg).name
with open(cfg) as f:
self.yaml = yaml.load(f, Loader=yaml.SafeLoader) # model dict
# Define model
ch = self.yaml['ch'] = self.yaml.get('ch', ch) # input channels
if nc and nc != self.yaml['nc']:
logger.info('Overriding model.yaml nc=%g with nc=%g' % (self.yaml['nc'], nc))
self.yaml['nc'] = nc # override yaml value
self.model, self.save = parse_model(deepcopy(self.yaml), ch=[ch]) # model, savelist
self.names = [str(i) for i in range(self.yaml['nc'])] # default names
# print([x.shape for x in self.forward(torch.zeros(1, ch, 64, 64))])
# Build strides, anchors
m = self.model[-1] # Detect()
if isinstance(m, Detect):
s = 256 # 2x min stride
m.stride = torch.tensor([s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))]) # forward
m.anchors /= m.stride.view(-1, 1, 1)
check_anchor_order(m)
self.stride = m.stride
self._initialize_biases() # only run once
# print('Strides: %s' % m.stride.tolist())
# Init weights, biases
initialize_weights(self)
self.info()
logger.info('')
def forward(self, x, augment=False, profile=False):
if augment:
img_size = x.shape[-2:] # height, width
s = [1, 0.83, 0.67] # scales
f = [None, 3, None] # flips (2-ud, 3-lr)
y = [] # outputs
for si, fi in zip(s, f):
xi = scale_img(x.flip(fi) if fi else x, si, gs=int(self.stride.max()))
yi = self.forward_once(xi)[0] # forward
# cv2.imwrite(f'img_{si}.jpg', 255 * xi[0].cpu().numpy().transpose((1, 2, 0))[:, :, ::-1]) # save
yi[..., :4] /= si # de-scale
if fi == 2:
yi[..., 1] = img_size[0] - yi[..., 1] # de-flip ud
elif fi == 3:
yi[..., 0] = img_size[1] - yi[..., 0] # de-flip lr
y.append(yi)
return torch.cat(y, 1), None # augmented inference, train
else:
return self.forward_once(x, profile) # single-scale inference, train
车间产线作业流程合规检测系统除了实时检测和预警功能,该系统还具备强大的数据记录和分析能力。它会将工人每一次的操作行为详细记录下来,包括操作时间、使用的工具、操作步骤以及是否违规等信息。通过对这些数据的深度分析,企业可以清晰地了解生产流程中的各个环节,发现潜在的问题和瓶颈。例如,通过分析工人操作流程的合规性数据,企业可以发现某些操作步骤的违规率较高,从而对相关工人进行针对性的培训,或者对操作流程进行优化。帮助企业评估员工的工作表现,合理安排工作任务,进一步提高生产效率。


















 391
391

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









