







文章目录
1 串口驱动设计
串口发送或者接收,各自实现了一个"管道"。对于任意管道,一端写入数据,另一端读取数据。或者可以理解为一方生产,一方消费,即所谓的"生产-消费者模型"。
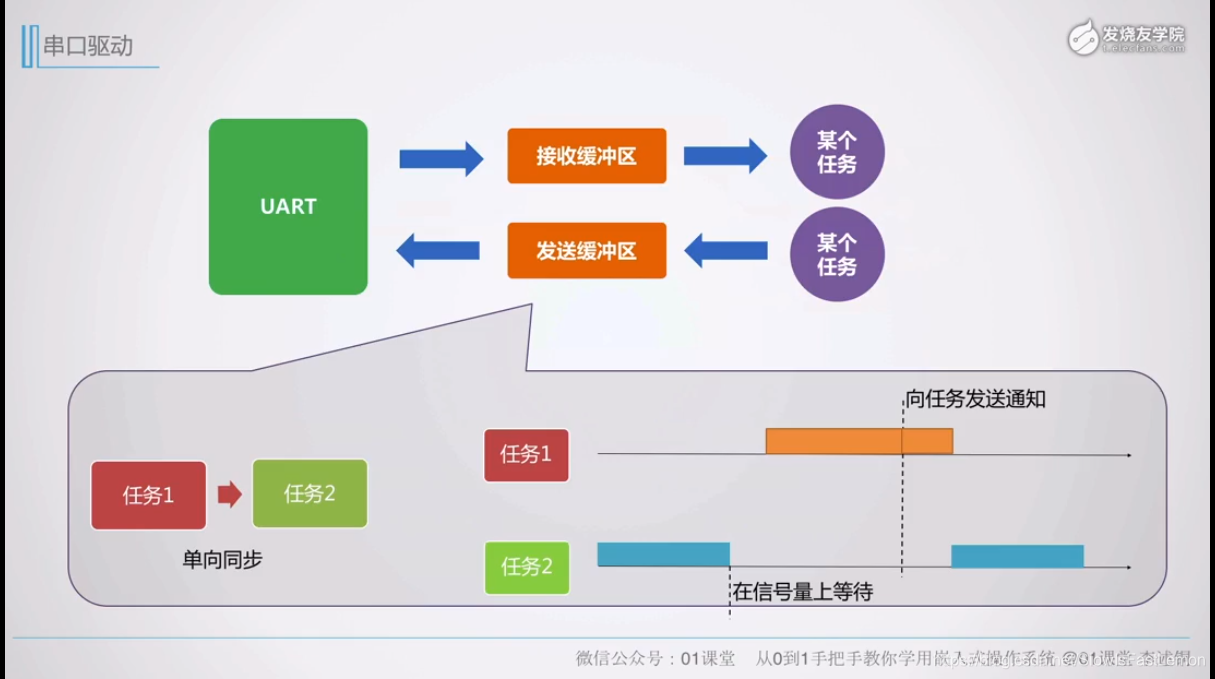
以串口数据发送为例,该驱动完成任务与发送中断之间的通信。
通信通过自定义的全局数据结构来实现,待发送的数据写入到循环FIFO中。然后结合信号量来实现读写的同步,使用开关中断来对全局数据的访问进行共享保护控制。
串口数据的接收,工作原理和发送类似。
可以看到,无论是发送还是接受,通过RTOS的这些功能模块能够有效地提升数据收发效率。
实现代码如下:
uart.h:
/**
* @brief 串口驱动
* @details
* @author 01课堂 李述铜 http://01ketang.cc
* @date 2017-06-01
* @version 1.0
* @copyright 版权所有,禁止用于商业用途
*/
#ifndef UART_H
#define UART_H
#define UART_BAUDRATE 115200
#define UART_RXBUFFER_SIZE 32
#define UART_TXBUFFER_SIZE 128
void UartInit (void);
void UartRead (char * packet, uint32_t len);
void UartWrite (const char * packet, uint32_t len);
#endif //UART_H
uart.c:
/**
* @brief 串口驱动
* @details
* @author 01课堂 李述铜 http://01ketang.cc
* @date 2017-06-01
* @version 1.0
* @copyright 版权所有,禁止用于商业用途
*/
#include "tinyOS.h"
#include "uart.h"
#include "stm32f10x_usart.h"
static uint8_t rxBuffer[UART_RXBUFFER_SIZE];
static uint32_t rxWritePos;
static uint32_t rxReadPos;
static tSem rxReceivedSem;
static uint8_t txBuffer[UART_TXBUFFER_SIZE];
static uint32_t txWritePos;
static uint32_t txReadPos;
static tSem txFreeSem;
/**
* 中断处理函数
*/
void USART1_IRQHandler (void) {
ITStatus status;
// 串口接收
status = USART_GetITStatus(USART1, USART_IT_RXNE);
if (status == SET) {
tSemInfo semInfo;
uint16_t ch = (uint32_t)USART_ReceiveData(USART1);
// 仅当有空闲空间时才写入,否则丢弃
tSemGetInfo(&rxReceivedSem, &semInfo);
if (semInfo.count < semInfo.maxCount) {
tTaskCritical_t critical = tTaskEnterCritical();
rxBuffer[rxWritePos++] = (uint8_t)ch;
if (rxWritePos >= UART_RXBUFFER_SIZE) {
rxWritePos = 0;
}
tTaskExitCritical(critical);
tSemNotify(&rxReceivedSem);
}
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
// 发送中断: 自动从邮箱中取数据发送
status = USART_GetITStatus(USART1, USART_IT_TXE);
if (status == SET) {
tSemInfo semInfo;
// 如果发送缓冲有数据,取一个发送
tSemGetInfo(&txFreeSem, &semInfo);
if (semInfo.count < semInfo.maxCount) {
tTaskCritical_t critical;
uint8_t ch;
// 从发送缓冲区中取数据
critical = tTaskEnterCritical();
ch = txBuffer[txReadPos++];
if (txReadPos >= UART_TXBUFFER_SIZE) {
txReadPos = 0;
}
tTaskExitCritical(critical);
tSemNotify(&txFreeSem);
USART_SendData(USART1, (uint16_t)ch);
} else {
USART_ITConfig(USART1, USART_IT_TXE, DISABLE);
}
USART_ClearITPendingBit(USART1, USART_IT_TXE);
}
}
/**
* USART硬件初始化
*/
static void UartHalInit (void) {
USART_InitTypeDef USART_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
USART_InitStructure.USART_BaudRate = UART_BAUDRATE;
USART_InitStructure.USART_WordLength = USART_WordLength_9b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1, &USART_InitStructure);
USART_Cmd(USART1, ENABLE);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
NVIC_EnableIRQ(USART1_IRQn);
}
/**
* 初始化串口
*/
void UartInit (void) {
UartHalInit();
tSemInit(&rxReceivedSem, 0, UART_RXBUFFER_SIZE);
rxReadPos = 0;
rxWritePos = 0;
tSemInit(&txFreeSem, UART_TXBUFFER_SIZE, UART_TXBUFFER_SIZE);
txReadPos = 0;
txWritePos = 0;
}
/**
* 等待接收数据包
* @param packet 接收到的数据包指针存储地址
* @return 0 无错误;1 有错误
*/
void UartRead (char * packet, uint32_t len) {
tTaskCritical_t critical;
while (len -- > 0) {
tSemWait(&rxReceivedSem, 0);
// 从接收缓冲区中读取
critical = tTaskEnterCritical();
*packet++ = rxBuffer[rxReadPos++];
if (rxReadPos >= UART_RXBUFFER_SIZE) {
rxReadPos = 0;
}
tTaskExitCritical(critical);
}
}
/**
* 写入数据包
* @param packet 待写入的数据包
*/
void UartWrite (const char * packet, uint32_t len) {
tTaskCritical_t critical;
uint32_t status;
while (len-- > 0) {
// 等待空闲空间
tSemWait(&txFreeSem, 0);
// 写入发送缓冲区
critical = tTaskEnterCritical();
txBuffer[txWritePos++] = *packet++;
if (txWritePos >= UART_TXBUFFER_SIZE) {
txWritePos = 0;
}
tTaskExitCritical(critical);
// 这里加循环反复调用,是考虑到中途可能发生其它中断延迟导致没有及时触发
// 只有当硬件真正在空闲时,才手动触发一次
status = USART_GetFlagStatus(USART1, USART_FLAG_TXE);
if (status == SET) {
USART_ITConfig(USART1, USART_IT_TXE, ENABLE);
}
}
}
app.c:
/**
* @brief tOS应用示例
* @details
* @author 01课堂 李述铜 http://01ketang.cc
* @date 2017-06-01
* @version 1.0
* @copyright 版权所有,禁止用于商业用途
*/
#include "tinyOS.h"
#include "app.h"
#include "hal.h"
#include "button.h"
#include "uart.h"
static tTaskStack task1Env[TASK1_ENV_SIZE]; // 任务1的堆栈空间
static tTask task1;
void task1Entry (void * param) {
char str[64];
uint32_t count = 0;
for (;;) {
// sprintf(str, "Button press: %d\n", count++);
// UartWritePacket(str);
char msg;
UartRead(&msg, 1);
UartWrite(&msg, 1);
}
}
/**
* App的初始化
*/
void tInitApp (void) {
halInit();
ButtonInit();
UartInit();
tTaskInit(&task1, task1Entry, (void *) 0x0, TASK1_PRIO, task1Env, sizeof(task1Env));
}
参考资料:

















 1397
1397

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









