



half extents
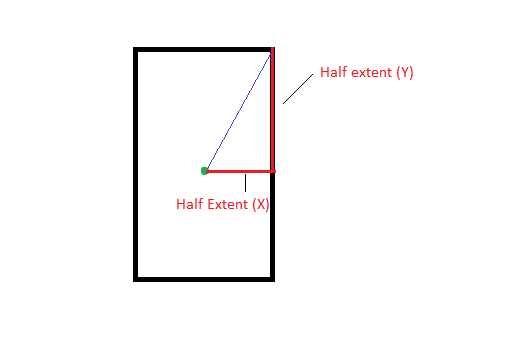
blue line is hypotenuse
From there you can simply linearly add Pi/4 to the angle (45 degrees), then use:
newx = cos(newAngle)*dist;
newy = sin(newAngle)*dist;
http://gamedev.stackexchange.com/questions/14733/aabb-of-rotated-sprite
blue line is hypotenuse
From there you can simply linearly add Pi/4 to the angle (45 degrees), then use:
newx = cos(newAngle)*dist;
newy = sin(newAngle)*dist;
http://gamedev.stackexchange.com/questions/14733/aabb-of-rotated-sprite
 3508
3508

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





























