



文章目录
ARM通讯接口
串行通信的基本概念
- 在通信领域内,有两种数据通信方式:并行通信和串行通信
- 串口的数据传输是以串行方式进行的。
- 串口在数据通信中,一次只传输一个比特的数据。
- 串行数据的传输速度用bps或波特率来描述。
串行通信涉及的常用术语(单工、半双工和全双工,异步方式与同步方式)
- 单工(Simplex)
特点:仅能进行一个方向的数据传送 - 半双工(Half Duplex)
特点:数据可以在两个方向上进行传送,但是这种传送绝不能同时进行 - 全双工(Full Duplex)
特点:能够在两个方向同时进行数据传送
数据传输率
每秒传输的二进制位数,单位为bps(bit per second )也称比特率
多根数据线 地址线,如内存
- 同步通信方式( Synchronous )所用的数据格式没有起始位、停止位,一次传送的字符个数可变。在传送前,先按照一定的格式将各种信息装配成一个包,该包包括供接收方识别用的同步字符一个或两个,其后紧跟着要传送的n个字符,再后就是校验字符。
- 异步方式(Asynchronous):也称“起止同步式”。

协议举例
-
串行通讯
双线 uart (全双工 异步)

双线 i2c (半双工 同步)

三线 spi (全双工 同步)

- 串口通信接收端通过循环检测高低电平来读取数据。若频率太高,波形就会变窄,接收端误识别几率就会增大
- 所以同步通信引入了时钟线。同步通信速度较异步高
- 并行通讯:多根数据线 地址线,如内存
- 硬件流控制
如果打开串口硬件流控制后,串口A只有在nCTS被(串口B的nRTS)激活后才能把数据发送出去;
当串口A可以接收数据时,激活nRTS

串口 UART 协议

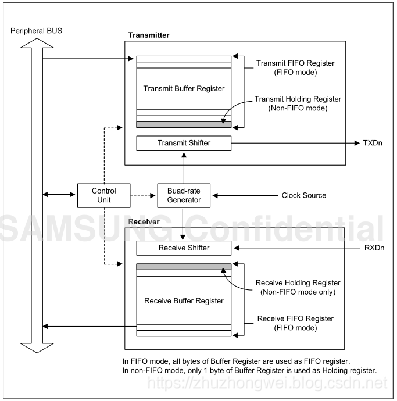
Exynos4412 UART接口功能模块
Exynos4412 相关寄存器

UART 编程
main.c
/*
功能:修改代码,实现除com2口外的别的一个com口输出字符显示
*/
#define GPA1CON (*(volatile unsigned int *)0x11400020) //volatile 确保本条指令不会因编译器的优化而省略
#define ULCON2 (*(volatile unsigned int *)0x13820000) //串口2线控:数据位,停止位,奇偶校验位
#define UCON2 (*(volatile unsigned int *)0x13820004) //串口2读取控制:串口读的方式(如:轮询/中断等),写的方式
#define UBRDIV2 (*(volatile unsigned int *)0x13820028) //串口2波特率设置
#define UFRACVAL2 (*(volatile unsigned int *)0x1382002c) //串口2波特率设置
#define UTXH2 (*(volatile unsigned int *)0x13820020) //串口2发送缓存器
#define URXH2 (*(volatile unsigned int *)0x13820024) //串口2接受缓存器
#define UTRSTAT2 (*(volatile unsigned int *)0x13820010) //串口2状态寄存器
#define GPA0CON (*(volatile unsigned int *)0x11400000) //volatile 确保本条指令不会因编译器的优化而省略
#define ULCON0 (*(volatile unsigned int *)0x13800000) //串口0线控:数据位,停止位,奇偶校验位
#define UCON0 (*(volatile unsigned int *)0x13800004) //串口0读取控制:串口读的方式(如:轮询/中断等),写的方式
#define UBRDIV0 (*(volatile unsigned int *)0x13800028) //串口0波特率设置
#define UFRACVAL0 (*(volatile unsigned int *)0x1380002c) //串口0波特率设置
#define UTXH0 (*(volatile unsigned int *)0x13800020) //串口0发送缓存器
#define URXH0 (*(volatile unsigned int *)0x13800024) //串口0接受缓存器
#define UTRSTAT0 (*(volatile unsigned int *)0x13800010) //串口0状态寄存器
#define ULCON3 (*(volatile unsigned int *)0x13830000) //串口3线控:数据位,停止位,奇偶校验位
#define UCON3 (*(volatile unsigned int *)0x13830004) //串口3读取控制:串口读的方式(如:轮询/中断等),写的方式
#define UBRDIV3 (*(volatile unsigned int *)0x13830028) //串口3波特率设置
#define UFRACVAL3 (*(volatile unsigned int *)0x1383002c) //串口3波特率设置
#define UTXH3 (*(volatile unsigned int *)0x13830020) //串口3发送缓存器
#define URXH3 (*(volatile unsigned int *)0x13830024) //串口3接受缓存器
#define UTRSTAT3 (*(volatile unsigned int *)0x13830010) //串口3状态寄存器
typedef enum
{
DEVICE_UART_COM0 = 0,
DEVICE_UART_COM1 = 1,
DEVICE_UART_COM2 = 2,
DEVICE_UART_COM3 = 3,
MAX_DEVICE
}DEVICE_LIST_E;
/*
设置波特率为115200
//For example, if the Baud rate is 115200 bps and SCLK_UART is 100 MHz,UBRDIVn and UFRACVALn are:
//DIV_VAL = (SCLK_UART/(bps * 16)) - 1
//DIV_VAL = (100000000/(115200 * 16)) – 1
//= 54.253 – 1
//= 53.253
//UBRDIVn = 53 (integer part of DIV_VAL)
//UFRACVALn/16 = 0.253
//Therefore, UFRACVALn = 4
*/
void USART_Init(DEVICE_LIST_E Device_type)
{
if(Device_type == DEVICE_UART_COM0)
{
//1.配置GPA0CON寄存器中的UART0
//GPA0_0 UART_0_RXD
//GPA0_1 UART_0_TXD
GPA0CON &= 0xffffff00;
GPA0CON |= 0x00000022;
//2.配置ULCON0寄存器
//串口0 8位数据位,1位停止位,无奇偶校验
ULCON0 &= 0Xffffffc0;
ULCON0 |= 0x00000003;
//3.配置UCON0寄存器
//通过轮询(polling)的模式读取串口数据 通过轮询(polling)的模式往串口写入数据数据
UCON0 &= 0xfffffff0;
UCON0 |= 0x00000005;
//4.设置波特率为115200
UBRDIV0 = 53;
UFRACVAL0 = 4;
}
if(Device_type == DEVICE_UART_COM2)
{
GPA1CON &= 0xffffff00;
GPA1CON |= 0x00000022;
ULCON2 &= 0Xffffffc0;
ULCON2 |= 0x00000003;
UCON2 &= 0xfffffff0;
UCON2 |= 0x00000005;
UBRDIV2 = 53;
UFRACVAL2 = 4;
}
if(Device_type == DEVICE_UART_COM3)
{
GPA1CON &= 0xff00ffff;
GPA1CON |= 0x00220000;
ULCON3 &= 0Xffffffc0;
ULCON3 |= 0x00000003;
UCON3 &= 0xfffffff0;
UCON3 |= 0x00000005;
UBRDIV3 = 53;
UFRACVAL3 = 4;
}
}
void putc(DEVICE_LIST_E Device_type, char c)
{
switch(Device_type)
{
case DEVICE_UART_COM0:
while(1)
{
if(UTRSTAT0 && 0X02)
break;
}
UTXH0 = c;
break;
case DEVICE_UART_COM1:
break;
case DEVICE_UART_COM2:
while(1)
{
if(UTRSTAT2 && 0X02)
break;
}
UTXH2 = c;
break;
case DEVICE_UART_COM3:
while(1)
{
if(UTRSTAT3 && 0X02)
break;
}
break;
default:
break;
}
}
char getc(void)
{
while(1)
{
if(UTRSTAT0 && 0X01) break;
}
return URXH0;
}
int main(void)
{
DEVICE_LIST_E vDevice = DEVICE_UART_COM0;
USART_Init(vDevice);
char c;
while(1)
{
c = getc();
delay1s();
putc(vDevice,c);
delay1s();
}
return 0;
}
Makefile
all:
arm-none-linux-gnueabi-gcc -fno-builtin -nostdinc -c -o start.o start.S
arm-none-linux-gnueabi-gcc -fno-builtin -nostdinc -c -o main.o main.c
arm-none-linux-gnueabi-ld start.o main.o -Tmap.lds -o uart.elf
arm-none-linux-gnueabi-objcopy -O binary uart.elf uart.bin
arm-none-linux-gnueabi-objdump -D uart.elf > uart.dis
clean:
rm -rf *.bak start.o main.o uart.elf uart.bin uart.dis
start.S
.global delay1s
.text
.global _start
_start:
b reset @0x00
ldr pc,_undefined_instruction @0x04
ldr pc,_software_interrupt
ldr pc,_prefetch_abort
ldr pc,_data_abort
ldr pc,_not_used
ldr pc,_irq
ldr pc,_fiq
_undefined_instruction: .word _undefined_instruction
_software_interrupt: .word _software_interrupt
_prefetch_abort: .word _prefetch_abort
_data_abort: .word _data_abort
_not_used: .word _not_used
_irq: .word _irq
_fiq: .word _fiq
reset:
ldr r0,=0x40008000 @设置异常向量表的启始地址为 0x40008000
mcr p15,0,r0,c12,c0,0 @ Vector Base Address Register
init_stack:
ldr r0,stacktop /*get stack top pointer*/
/********svc mode stack********/
mov sp,r0
sub r0,#128*4 /*512 byte for irq mode of stack*/
/****irq mode stack**/
msr cpsr,#0xd2
mov sp,r0
sub r0,#128*4 /*512 byte for irq mode of stack*/
/***fiq mode stack***/
msr cpsr,#0xd1
mov sp,r0
sub r0,#0
/***abort mode stack***/
msr cpsr,#0xd7
mov sp,r0
sub r0,#0
/***undefine mode stack***/
msr cpsr,#0xdb
mov sp,r0
sub r0,#0
/*** sys mode and usr mode stack ***/
msr cpsr,#0x10
mov sp,r0 /*1024 byte for user mode of stack*/
b main
delay1s:
ldr r4,=0x1ffffff
delay1s_loop:
sub r4,r4,#1
cmp r4,#0
bne delay1s_loop
mov pc,lr
.align 4
/**** swi_interrupt handler ****/
stacktop: .word stack+4*512
.data
stack:
.space 4*512
.end
map.lds
OUTPUT_FORMAT("elf32-littlearm", "elf32-littlearm", "elf32-littlearm") /* 指定输出的文件格式 */
OUTPUT_ARCH(arm) /* 生成文件支持arm系列的CPU */
ENTRY(_start) /* 连接后的第一条指令所在的地址是_start */
SECTIONS /* 目标文件的摆放 */
{
. = 0x40008000; /* 指定链接的起始地址 */
. = ALIGN(4); /* 指令的对齐 */
.text : /* 代码段的开始 */
{
start.o(.text) /* start.o文件放在开始的位置 */
*(.text) /* 其他目标文件自动分配位置 */
}
. = ALIGN(4); /* 代码的对齐*/
.data :
{ *(.data) }
. = ALIGN(4);
.bss :
{ *(.bss) }
}

















 1193
1193

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









