




 本文探讨了UML关系图在软件构建中的应用,重点介绍了rz_sensor_data_manager_t类作为传感器数据统一管理的方法,以及sensor_data_interface_t接口的实现细节。通过链表管理相同属性对象,降低了模块间的耦合度。
本文探讨了UML关系图在软件构建中的应用,重点介绍了rz_sensor_data_manager_t类作为传感器数据统一管理的方法,以及sensor_data_interface_t接口的实现细节。通过链表管理相同属性对象,降低了模块间的耦合度。
UML关系图
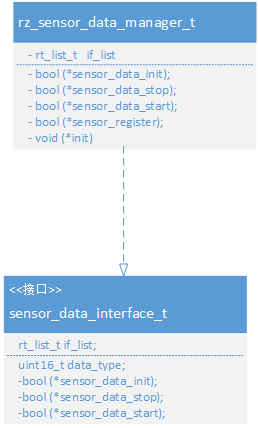
从UML用例图可以看出,rz_sensor_data_manager_t 是一个针对传感器数据的一个统一管理类,包含了一些统一的操作功能,而接口sensor_data_interface_t 是针对 数据对象的实现。
知识点补充:
【实现关系】:是一种类与接口的关系,表示类是接口所有特征和行为的实现
【箭头指向】:带三角箭头的虚线,箭头指向接口是一种类与接口的关系,表示类是接口所有特征和行为的实现。
软件构建思路
建立对象模型,采用统一的接口对相同对象进行访问,这样模块的耦合低最低。
采用链表进行管理,即所有相同属性的对象均挂载在一条链表上。
数据管理类
成员属性和成员函数
#ifndef __RZ_SENSOR_DATA_MANAGER_H__
#define __RZ_SENSOR_DATA_MANAGER_H__
#include "lw_oopc.h"
#include <stdbool.h>
/* support sensor data type + */
typedef enum rz_sensor_data_type_def{
RZ_SENSOR_DATA_TYPE_ANGLE = 0x00,
RZ_SENSOR_DATA_TYPE_BOLT,
RZ_SENSOR_DATA_TYPE_MAX,
}rz_sensor_data_type_t, *prz_sensor_data_type_t;
typedef struct rz_sensor_data_manager_t rz_sensor_data_manager_t, *prz_sensor_data_manager_t;
typedef struct sensor_data_interface_def{
rt_list_t if_list; /* reload interface list */
uint16_t data_type; /* rz_sensor_data_type_t */
/* reload interface */
bool (*sensor_data_init)(rz_sensor_data_manager_t *t,rz_sensor_data_type_t type);
bool (*sensor_data_stop)(rz_sensor_data_manager_t *t,rz_sensor_data_type_t type);
bool (*sensor_data_start)(rz_sensor_data_manager_t *t,rz_sensor_data_type_t type);
}sensor_data_interface_t, *psensor_data_interface_t;
CLASS(rz_sensor_data_manager_t)
{
rt_list_t if_list; /* reload interface list */
bool (*sensor_data_init)(rz_sensor_data_manager_t *t,rz_sensor_data_type_t type);
bool (*sensor_data_stop)(rz_sensor_data_manager_t *t,rz_sensor_data_type_t type);
bool (*sensor_data_start)(rz_sensor_data_manager_t *t,rz_sensor_data_type_t type);
bool (*sensor_register)(rz_sensor_data_manager_t *t, psensor_data_interface_t pif);
void (*init)(rz_sensor_data_manager_t *t);
};
/*---------------------- External function interface call ----------------------------*/
rz_sensor_data_manager_t *rz_sensor_data_manager_obj_get(void);
void sensor_data_manager_init(void);
bool rz_sensor_data_init(rz_sensor_data_type_t type);
bool rz_sensor_data_stop (rz_sensor_data_type_t type);
bool rz_sensor_data_start(rz_sensor_data_type_t type);
#endif
功能实现接口
#include "rz_sensor_data_manage.h"
#include "rz_sensor_data_wave.h"
const rz_sensor_data_type_t support_sensor_data_type[RZ_SENSOR_DATA_TYPE_MAX] = {
RZ_SENSOR_DATA_TYPE_BOLT,
};
static rz_sensor_data_manager_t rz_sensor_data_manager_obj;
rz_sensor_data_manager_t *rz_sensor_data_manager_obj_get(void)
{
return &rz_sensor_data_manager_obj;
}
static bool sensor_data_stop(rz_sensor_data_manager_t *t,rz_sensor_data_type_t type)
{
rt_list_t *bif_pos = NULL;
bool iret = false;
rt_list_for_each(bif_pos, &t->if_list) {
psensor_data_interface_t pif = (psensor_data_interface_t)bif_pos;
if (type == (pif->data_type)) {
/* if matched, call the reload interface */
iret = pif->sensor_data_stop(t,type);
}
}
return iret;
}
static bool sensor_data_start(rz_sensor_data_manager_t *t,rz_sensor_data_type_t type)
{
rt_list_t *bif_pos = NULL;
bool iret = false;
rt_list_for_each(bif_pos, &t->if_list) {
psensor_data_interface_t pif = (psensor_data_interface_t)bif_pos;
if (type == (pif->data_type)) {
/* if matched, call the reload interface */
iret = pif->sensor_data_start(t,type);
}
}
return iret;
}
static bool sensor_data_init(rz_sensor_data_manager_t *t,rz_sensor_data_type_t type)
{
rt_list_t *bif_pos = NULL;
bool iret = false;
rt_list_for_each(bif_pos, &t->if_list) {
psensor_data_interface_t pif = (psensor_data_interface_t)bif_pos;
if (type == (pif->data_type)) {
/* if matched, call the reload interface */
iret = pif->sensor_data_init(t,type);
}
}
return iret;
}
/**
* This function is find interface functions according to data types
* @param t is sensor manager object
* @param type is sensor data type
* @return Returns interface object on success and NULL on failure
*/
static inline sensor_data_interface_t * _find_interface(rz_sensor_data_manager_t *t, rz_sensor_data_type_t type)
{
rt_list_t *pos = NULL;
sensor_data_interface_t *pif = NULL;
rt_list_for_each(pos, &t->if_list) {
pif = rt_container_of(pos,sensor_data_interface_t, if_list);
if (pif->data_type == type) {
return pif;
}
}
return NULL;
}
/**
* This function is interface function register
* @param t is sensor manager object
* @param pif is interface functions that need to be registered
*/
static bool sensor_register(rz_sensor_data_manager_t *t, psensor_data_interface_t pif)
{
rz_sensor_data_type_t type = (rz_sensor_data_type_t)pif->data_type;
if (NULL != _find_interface(t,type)) {
rt_kprintf("don't register sensor data(%d) repeatly\r\n", type);
return false;
}
/* Register the interface function to the data management class */
rt_list_insert_after(&t->if_list, &pif->if_list);
return true;
}
/**
* This function is initialize sensor manager object
* @param t is sensor manager object
*/
static void sensor_init(rz_sensor_data_manager_t *t)
{
rt_list_init(&t->if_list);
}
CTOR(rz_sensor_data_manager_t)
FUNCTION_SETTING(sensor_data_init, sensor_data_init);
FUNCTION_SETTING(sensor_data_stop, sensor_data_stop);
FUNCTION_SETTING(sensor_data_start, sensor_data_start);
FUNCTION_SETTING(sensor_register, sensor_register);
FUNCTION_SETTING(init, sensor_init);
END_CTOR
void sensor_data_manager_init(void)
{
rz_sensor_data_manager_t *t = rz_sensor_data_manager_obj_get();
rz_sensor_data_manager_t_ctor(t);
t->init(t); /* sensor_init */
sensor_wave_obj_init();
}
bool rz_sensor_data_init(rz_sensor_data_type_t type)
{
bool iret = false;
rz_sensor_data_manager_t *t = rz_sensor_data_manager_obj_get();
if(t != RT_NULL) {
iret = t->sensor_data_init(t,type); /* sensor_data_init() */
}
return iret;
}
bool rz_sensor_data_stop(rz_sensor_data_type_t type)
{
bool iret = false;
rz_sensor_data_manager_t *t = rz_sensor_data_manager_obj_get();
if(t != RT_NULL) {
iret = t->sensor_data_stop(t,type); /* sensor_data_stop() */
}
return iret;
}
bool rz_sensor_data_start(rz_sensor_data_type_t type)
{
bool iret = false;
rz_sensor_data_manager_t *t = rz_sensor_data_manager_obj_get();
if(t != RT_NULL) {
iret = t->sensor_data_stop(t,type); /* sensor_data_stop() */
}
return iret;
}
数据对象实例操作
内部声明和属性
#ifndef __RZ_SENSOR_DATA_WAVE_H__
#define __RZ_SENSOR_DATA_WAVE_H__
#include "rz_sensor_data_manage.h"
typedef struct sensor_data_split_interface_def{
uint16_t data_type; /* rz_upload_data_type_t */
/* reload interface */
bool (*sensor_data_init)(rz_sensor_data_manager_t *t,rz_sensor_data_type_t type);
bool (*sensor_data_stop)(rz_sensor_data_manager_t *t,rz_sensor_data_type_t type);
bool (*sensor_data_start)(rz_sensor_data_manager_t *t,rz_sensor_data_type_t type);
}sensor_data_split_interface_t, *psensor_data_split_interface_t;
typedef struct rz_sensor_wave_t rz_sensor_wave_t;
CLASS(rz_sensor_wave_t)
{
sensor_data_interface_t sensor_wave_if;
rz_sensor_data_manager_t *sensor_data_manager;
bool (*sensor_wave_init)(rz_sensor_wave_t *t, rz_sensor_data_type_t data_type);
};
bool sensor_wave_obj_init(void);
#endif
功能实现
#include "rz_sensor_data_wave.h"
const rz_sensor_data_type_t sensor_support_data_type_split[] = {
RZ_SENSOR_DATA_TYPE_BOLT,
};
static const sensor_data_split_interface_t sensor_data_split_interface[] = {
{RZ_SENSOR_DATA_TYPE_BOLT, NULL, NULL},
};
uint32_t sensor_support_data_type_num(void)
{
return sizeof(sensor_support_data_type_split)/sizeof(rz_sensor_data_type_t);
}
/**
* This function is Initialize the data waveform interface
* @param t is sensor wave object
* @param data_type is sensor data type
*/
static bool sensor_wave_init(rz_sensor_wave_t *t, rz_sensor_data_type_t data_type)
{
psensor_data_interface_t pif = &t->sensor_wave_if;
prz_sensor_data_manager_t ppsensor_manager_data = rz_sensor_data_manager_obj_get();
uint32_t support_pl_type_num = sensor_support_data_type_num();
/* related to prz_offline_data_manager_t object */
t->sensor_data_manager = ppsensor_manager_data;
for(uint8_t i = 0; i < support_pl_type_num; i ++) {
if(sensor_data_split_interface[i].data_type == data_type) {
rt_list_init(&pif->if_list);
pif->data_type = data_type;
/* register function interface */
pif->sensor_data_init = sensor_data_split_interface[i].sensor_data_init;
pif->sensor_data_stop = sensor_data_split_interface[i].sensor_data_stop;
pif->sensor_data_start = sensor_data_split_interface[i].sensor_data_start;
return true;
}
}
return false;
}
bool sensor_wave_obj_init(void)
{
//rz_offline_wave_t * t = rz_offline_wave_obj_get();
bool iret = true;
uint32_t support_data_type_num = sensor_support_data_type_num();
/* Each data type is registered once */
for (uint8_t i = 0; i < support_data_type_num; i++) {
rz_sensor_wave_t * t = rz_sensor_wave_t_new();
if(NULL == t) {
iret = false;
continue;
}
/* sensor_wave_init(),Data management class association */
if(true != t->sensor_wave_init(t, sensor_support_data_type_split[i])) {
rz_sensor_wave_t_dtor(t);
iret = false;
continue;
}
/* register to rz_sensor_data_manager_t */
if(true != t->sensor_data_manager->sensor_register(t->sensor_data_manager, &t->sensor_wave_if)) {
rz_sensor_wave_t_dtor(t);
iret = false;
continue;
}
}
return iret;
}
CTOR(rz_sensor_wave_t)
FUNCTION_SETTING(sensor_wave_init, sensor_wave_init);
END_CTOR
DTOR(rz_sensor_wave_t)
return lw_oopc_true;
END_DTOR

















 2594
2594

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









