




在灰度的阈值分割部分,就已经提到了类似于K-means的分割思想。
但本次的相似性分割与灰度值中的相似性分割有一个最大的区别:本次的像素要求连通!
这直接让分割任务上了一个档次,对于灰度值的自适应阈值来讲,只需统计图像中的灰度值分布情况与分类就行,不需要考虑像素点是否连通。
但是对于区域生长方法来讲,像素点连通则是区域生长算法的前提!
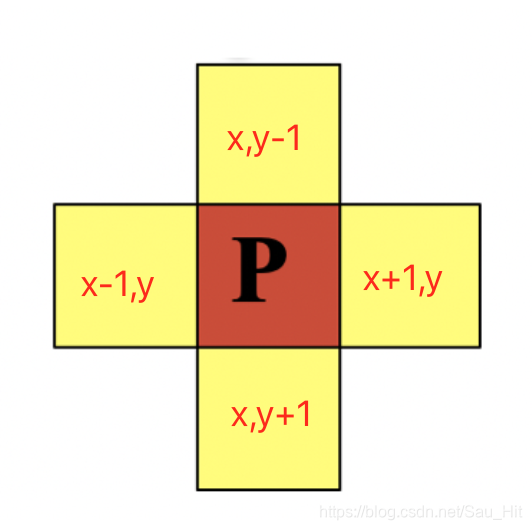
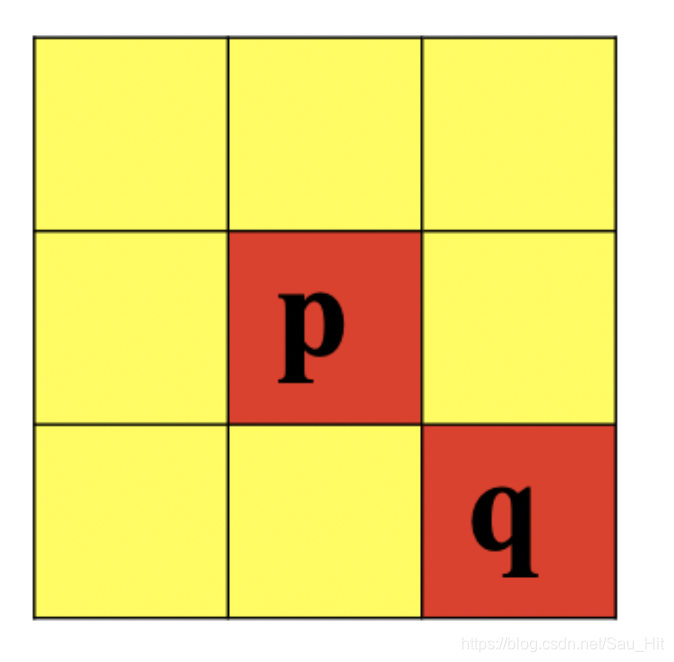
四邻域:
(这里坐标只是示意:具体是Opencv坐标还是图像处理坐标,还是笛卡尔坐标视实际情况!)
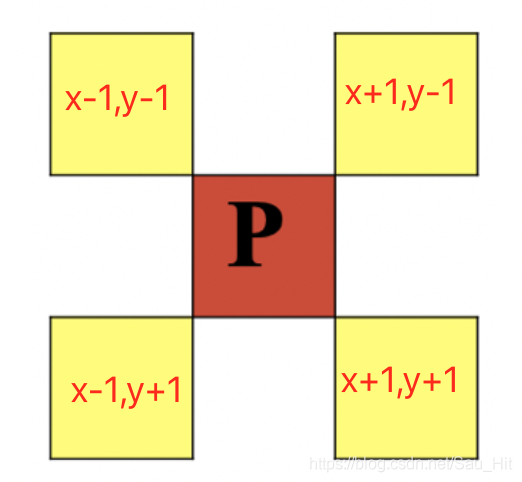
D邻域:
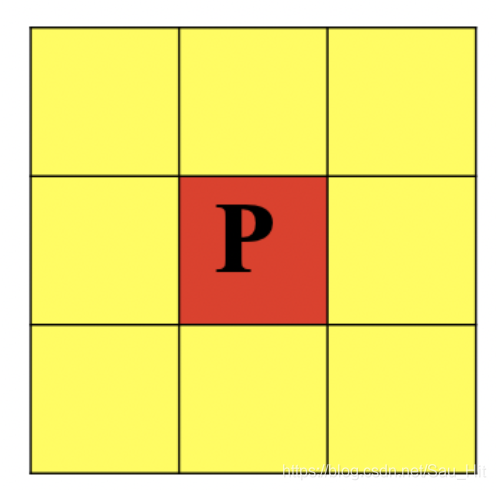
8邻域:
邻域有了,接下来就是连通,关于连通方面,还是需要好好去理解的,
毕竟连通性对于今后的区域图像分割起到了一定的限制作用!
在邻域内满足相似性条件,就成为连通。
对应的有4连通,8连通,以及m连通。
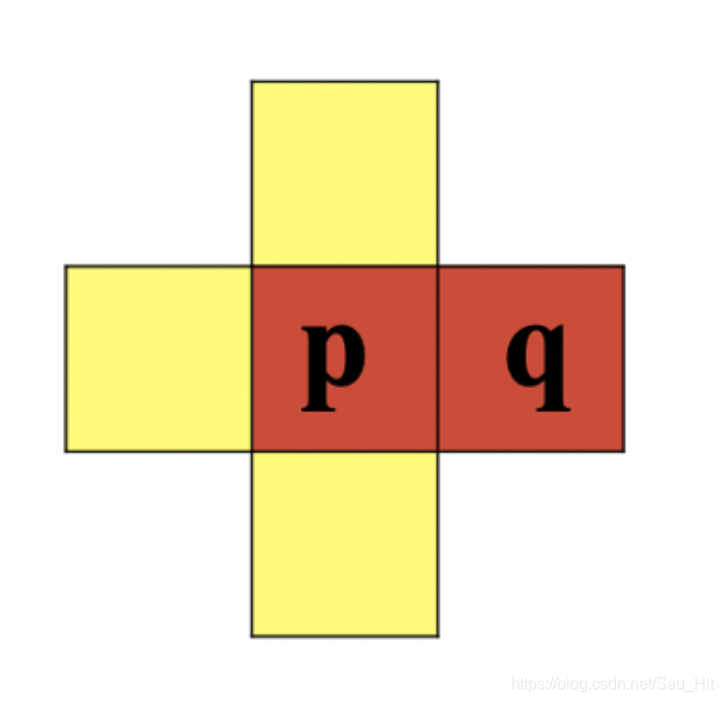
4连通:
8连通:
关于m连通,理解有点绕:整体上就是4连通+D连通,但是,二者4连通上没有交集。
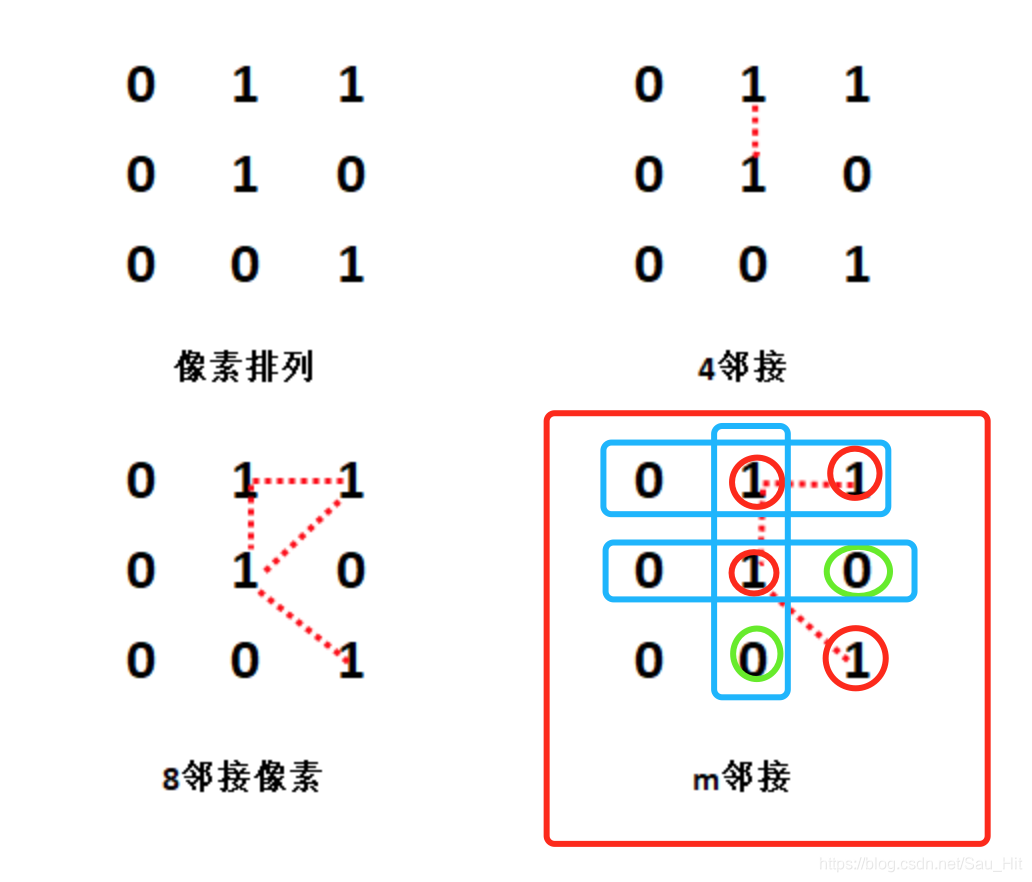
文字不容易表达出来,今后有例子再添加。
我们如何用代码来实现,判断是否连通呢?(以四连通为例)
判断连通是关键,但是该怎么做呢?
1.逐点判断,可能会存在重复值
2.将连通域寻找到底
这里纠正一下,不是去判断是否连通,在实际的代码中是根据连通去操作像素点!!!
不是判断,而是利用连通性去实现算法
use it , not prove it
# 此处的代码先遗留,等将图割部分共同完成后,回来补上代码。
写到这里,发现逻辑原理十分简单,但代码方面,该找一个怎样合适的算法是一个技术活。
这里的区域生长算法,与K均值聚类,都可用到树的存储结构来存储连通pixel
这里的差值计算也与图割也有交集。
具体怎么做,还要参考Github上的大神,关于图割与区域生长的具体做法。
未完成,后续更改。
# 后续仍要添加代码
# 2020-09-26

















 806
806

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









