



 本文介绍了CVPR2019大会上关于自动驾驶的热门讲座和研讨会,包括基于机器学习的视觉深度测量、安全人工智能在自动驾驶的应用以及CARLA自动驾驶挑战赛。专家探讨了深度学习在3D传感领域的进展,自动驾驶的安全性问题,以及通过模拟器训练智能体在虚拟世界中导航的可能性。
本文介绍了CVPR2019大会上关于自动驾驶的热门讲座和研讨会,包括基于机器学习的视觉深度测量、安全人工智能在自动驾驶的应用以及CARLA自动驾驶挑战赛。专家探讨了深度学习在3D传感领域的进展,自动驾驶的安全性问题,以及通过模拟器训练智能体在虚拟世界中导航的可能性。
????点击上方蓝字星标“Robinly”,获取更多重磅AI访谈
Robin.ly 是立足硅谷的视频内容平台,服务全球工程师和研究人员,通过与知名人工智能科学家、创业者、投资人和领导者的深度对话和现场交流活动,传播行业动态和商业技能,打造人才全方位竞争力。
2019年计算机视觉顶会CVPR前不久刚在美国长滩闭幕。Robin.ly在大会现场独家采访20多位热点论文作者,为大家解读论文干货。继前两篇CVPR2019 获奖论文现场解读,最新CVPR热点论文解读后,再次推出三篇无人车研究相关的热门讲座、研讨会解读:
讲座:基于机器学习的视觉深度测量
Learning-based Depth Estimation from Stereo and Monocular Images
研讨会: 安全性是无人驾驶的首要课题
Safe Artificial Intelligence for Automated Driving
研讨会: CARLA 自动驾驶挑战赛
CARLA Autonomous Driving Challenge

长按二维码或点击“阅读原文”
访问Robin.ly获取更多CVPR访谈实录

1
基于机器学习的视觉深度测量
视觉深度测量是计算机视觉领域的重要问题。它在自动驾驶、智能机器人、目标检测和跟踪、智能交通、三维建模和3D视频制作等领域都有广泛的应用。近几年来,机器学习和深度学习一直被应用于深度测量领域。CVPR的指导性讲座“Learning-based Depth Estimation from Stereo and Monocular Images”介绍并总结了他们这几年来机器学习技术在 3D 传感领域尤其在自动驾驶领域的应用。
讲座的发起人之一,来自意大利博洛尼亚大学(University of Bologna)的博士后研究员Matteo Poggi在CVPR大会现场接受Robin.ly专访时,给我们大家介绍了他们的讲座以及他们的研究。以下是访谈实录和视频。

Matteo Poggi在美国长滩CVPR2019现场接受Robin.ly访谈
Wenli: 能介绍一下这个讲座吗?
Matteo Poggi:
这个讲座主要是关于机器学习技术在 3D 传感领域的应用,特别是对单一或少数几个图像进行深度测量。其中强调了过去三年中我们如何从手动设计的方法转变为基于机器学习的方法。在手动设计的方法中,开发人员需要设计参数,不断试验和调整算法;在机器学习中,算法可以直接从数据中学习规律,人工干预的程度比较低,整体而言更高效。
最近几年,机器学习和深度学习领域都实现了技术上的突破,我们认为是时候总结一下这些重要的发展和变化了。去年在意大利Verona举办的一个小型会议3DV上,我们就提出过这个想法。我们在 GDB Tutorial 的平台上获得了非常积极的反馈,于是决定在 CVPR 大会上推广这个项目。
Wenli: 您认为初级和资深研究人员分别能从中学到什么呢?
Matteo Poggi:
对于初级研究人员,他们会了解到几年前,在机器学习和深度学习尚未成为主流的时代,哪些是人们所遵循的最先进的技术和理念。我们设计的机器学习方法其实是受到了前人工作的启发,比如在机器学习应用,新架构设计和训练阶段仍然使用了几何和立体匹配的方法。我认为认识到这一点对新一代研究人员来说非常重要,能够让他们学习过去的经验和教训,在此基础上采用基于深度学习的方法获得新的发现。
对于资深研究人员来说,这可能是一个难得的机会。我们简要的总结了人们所提出的设想和已经实现的技术,让他们能够在几个小时内了解该领域过去五年的技术进步和涉及到的数据。
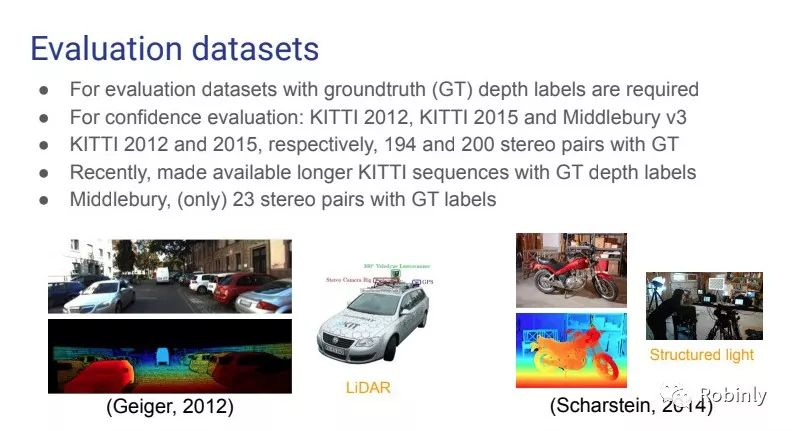
评估数据演变图示,来源:Matteo Poggi
Wenli: 我们在未来能看到哪些商业应用?现在这个领域还面临什么样的挑战?
Matteo Poggi:
比如基于增强现实的应用就可以从这些技术中受益,特别是使用单个图像的技术。因为现在的智能手机都至少安装了一个摄像头,利用小部分的场景信息就可以实现很多增强现实的应用。比如在桌子上显示出一个物体,或者创造出一些四处奔跑的小动物。对于自动驾驶或其他应用,我们可以利用立体匹配,目前这已经是一种非常成熟的技术了。即使是现有的机器学习技术也可以提供更强大的解决方案。一个主要的挑战就是我们要想办法让这些技术在任何地方都能正常运行而不受环境的限制。
Wenli: 你认为意大利与美国的研究环境相比有什么不同?
Matteo Poggi:
最早的时候我所在的研究小组只有四个人,规模远不及迄今为止我在美国看到的许多研究小组。当然,与很多有不同背景的人合作可以让你接触到不同的观点,帮助你更全面更深入的思考问题。这对于研究人员来说非常重要。而对于一个比较小的团队,成员之间彼此更容易相互了解,同事之间的关系更像朋友。这种凝聚力有助于团队协作,让大家更容易,也更快的在解决方案上达成一致。
讲座信息
Learning-based Depth Estimation from Stereo and Monocular Images
组织机构:University of Bologna,Stevens Institute of Technology
信息链接:
https://sites.google.com/view/cvpr-2019-depth-from-image/home
2
安全性是无人驾驶的首要课题
深度学习技术在自动驾驶领域取得了巨大成功,其优点是精准性高,鲁棒性强,以及成本低。该学习技术中主要挑战之一是如何对算法提高安全性。CVPR 的研讨会 “Safe Artificial Intelligence for Automated Driving” 针对在无人驾驶领域中,如何提高人工智能算法的安全性,进行了深入讨论。
研讨会的组织者之一,来自世界顶级汽车零部件供应商法雷奥(Valeo)安全驾驶技术总监Timo Sämann在CVPR大会现场接受Robin.ly专访,介绍了他们的研讨会以及他们的研究。以下是访谈实录和视频。

Timo Sämann在美国长滩CVPR2019现场接受Robin.ly访谈
Margaret Laffan: 法雷奥(Valeo)作为全球汽车零部件供应商,你能为我们介绍一下公司的愿景和目标吗?
Timo Sämann:
我的工作地点在德国 Kronach 市,法雷奥拥有 10 万多名员工,包含有四个主要的业务部门:可视化系统、热力系统、动力传动系统以及舒适的驾驶辅助系统。我所在的驾驶辅助系统部门的目标是开发能够让驾驶变得更安全,自主性更高、更直观、更具连接性的技术。
Margaret Laffan: 你这次组织的研讨会叫 “Safe Artificial Intelligence for Automated Driving” 的研讨会。为什么要组织这个研讨会?
Timo Sämann:
想要实现自动驾驶,我们就必须理解深度学习方法。在移动行业中使用深度学习方法的一个主要挑战是如何对算法提高安全性,而我们认为 DNN (深度神经网络)的“黑盒子”属性在科学研究中基本被忽略了。我们组织这次研讨会就是为了强调这一方向的重要性,引起更多的关注。
这个研讨会实际上属于一个德国资助的安全人工智能项目,将在下个月启动。该项目的目标是制定一个能够让我们安全使用 AI 的策略,最终提出 AI 算法必须满足的安全条件的标准。这一点非常重要,因为我们必须在将 AI 算法应用于自动驾驶汽车之类的产品之前确认其安全性是否满足要求。我们跟超过30个组织和个人合作,计划在3年后实现安全标准化。

剑桥大学研究员Alex Kendall在研讨会现场,来源:SAIAD Workshop 2019
Margaret Laffan:安全人工智能目前面临的一些挑战是什么?你在本次研讨会中是否涉及到了相关的解决方案?
Timo Sämann:
针对这个问题,我同意一种观点,就是整个安全空间分为三个子空间。第一个是规则,也就是如何为 DNN(深度神经网络)指定具体的行为,尤其是能否将交通规则或物理定律等先验知识倒入 DNN。这是一个悬而未决的问题。
第二个是鲁棒性。我们如何才能在孵化阶段中获得对抗干扰,比如应对对抗性攻击,外分布实例或恶劣的天气条件的鲁棒性。
第三个是认证。这涉及到如何验证和监控自动驾驶相关活动。是否有可能利用统计学上的相关信息在现实世界中对测试进行调整,还是必须在模拟环境中测试?需要基于什么样的 KPI 来证明 AI 比人类驾驶员更安全?
Margaret Laffan:你认为这个研讨会对于同领域的研究人员来说最大的收获是什么呢?
Timo Sämann:
在研讨会中有一位演讲人一语中的,指出目前为止大家主要关注的是基准问题,也就是人们开发的算法在基准测试中是否表现出色。但是在过去已经出现了很多基准,是否值得为0.2%的收益付出这么多努力呢? 因此,我们需要更深入的了解算法的工作原理,并降低对基准的关注。
我还想补充一点。虽然 Elon Musk 并不看好 LiDAR,但 LiDAR 传感器对于自动驾驶的安全性仍然非常重要。本次 CVPR 的很多参会者也同意我的观点,我也没有看到有 AI 会取代 LiDAR 的迹象。我只认为我们需要在相对较短的时间内为自动驾驶提供安全的AI技术即可。
Margaret Laffan: 你作为研究人员主要的研究兴趣是什么?如何平衡创新和安全?
Timo Sämann:
我对扩展神经网络(Extending Neural Networks) 很感兴趣,也就是利用视频数据的时间一致性。今天大多数 DNN 只使用单帧,这意味着我们从之前的时间中获得的所有信息在当前时间步骤中几乎没有被用于预测。我的目标就是实现更强的抗干扰能力。我在上周的 ICML 研讨会上还发表了一篇关于不确定性和鲁棒性的论文。说实话,我不认为必须要在创新和安全之间做出权衡,这反而会刺激我们更深入的了解 AI 算法,我认为这是开发高级人工智能的关键所在。
研讨会信息
Safe Artificial Intelligence for Automated Driving
组织机构:Valeo,BMW,Volkswagen,Intel,Fraunhofer,German Research Center for Artificial Intelligence
信息链接:
https://sites.google.com/view/saiad-wscvpr19/home?authuser=0
3
CARLA 自动驾驶挑战赛
CARLA(名字取自Car Learning to Act)是Intel Visual Computing Lab推出的一款用于城市自动驾驶研究的开源模拟器。CARLA支持城市自动驾驶系统底层开发、训练和验证。2019年的CVPR现场,Intel智能实验室的负责人German Ros等人组织发起了一场基于CARLA模拟器上的自动驾驶挑战赛。
以下是German Ros与Robin.ly主持人Wenli在CVPR现场的访谈实录和视频。

German Ros在美国长滩CVPR2019现场接受Robin.ly访谈
Wenli: 非常感谢您接受我们的采访。能介绍一下自己和这个挑战吗?
German Ros:
我叫 German Ros,是Inten CARLA 自动驾驶挑战环节的组织者,领导 CARLA 模拟团队。
CARLA 是在云端进行的自动驾驶挑战赛,目的是通过不同的任务考察各个团队所提交的智能体系统是否能够从起始位置移动到终点,并合理应对途中的各种复杂情况,遵守交通规则,保证行驶安全。我们考察它们是否能够到达指定位置和目的地,以及途中违规的次数,比如与其他车辆发生碰撞,闯红灯和忽略让行标志。如果出现违规行为就会被扣分。
Wenli: 您当时邀请了哪些人作为演讲嘉宾?
German Ros:
我们希望平衡工业界和学术界的研究进程,所以邀请了来自这两个领域的专家。在学术界,我们邀请了 Andreas Geiger,多年以来他为自动驾驶社区做出了很多贡献,是著名的 KITTI 基准的创造者。另外一个是加州大学伯克利分校的 Trevor Darrell 教授,他一直在通过各种活动积极推动自动驾驶的发展。在工业界,特斯拉,Uber和Waymo都是重要的参与者。我们邀请了Uber ATG 的首席科学家 Raquel Urtasun,Waymo 感知部门负责人 Drago Anguelov,还有特斯拉自动驾驶负责人 Andrej Karpathy。

挑战赛模拟路线图,来源:CARLA自动驾驶挑战赛
Wenli: 你们是第一次举办这次挑战,有什么收获吗?
German Ros:
在过去几年,自动驾驶领域取得了令人瞩目的成就,这也是我们举办这次挑战的动机。我记得几年前,让无人车沿着车道行驶都很困难;而现在,我看到来自世界各地的团队已经有能力处理不同场景中的复杂情况,我从没想过能有这么多的人涉足这个领域。我们正在迎接很多新的挑战,我认为这非常令人兴奋。
明年我们希望有越来越多的人能够参与这个挑战,也期待参与者能够慷慨的分享他们的代码,让新的团队可以在前一年研究成果的基础上优化当前的方案。除了通过竞争促进创新,我还希望看到团队之间实现真正的合作,共同创建一个社区,让人们能够共享和改进各种技术和工具。
Wenli: 您认为您的工作会有哪些商业化的应用?
German Ros:
我们想要预测技术的发展趋势。比如现在使用更多的是传统的自动驾驶方法,比如基于模块的模型。我们在考虑是否能通过不同的方法解决问题,比如是否可以转变为数据驱动。我正在与伯克利合作开展的一个大项目,利用一个模拟器,也就是 CARLA 来训练智能体学习如何在模拟环境中驾驶并应对不同的交通情况。我们发明了可以将 AI 模型直接应用于无人车的技术,让车辆可以通过体验虚拟世界就能实现在真实世界中导航,而不需要接触任何真实数据,虽然偶尔还是会用到。
Wenli: 您觉得学术界和工业界之间存在哪些差异?
German Ros:
我认为这两者之间的差距正在扩大,主要是因为工业界拥有大量的数据和硬件资源,也有足够的财力雇佣庞大的团队,处理更复杂的案件,相比之下学术界仍在研究如何应对简单的场景。我认为只有来自工业的创新是很片面的。自动驾驶是一个远未解决的问题,需要学术界和工业界的人共同努力。但是如果学术界的人无法获得相同的资源,无法使用公共数据或公共工具,他们就没办法做出重要贡献。
另外,目前不同的公司所报告的自动驾驶性能结果大相径庭。因为缺少足够的背景信息,我们根本无法以同样的标准比较孰优孰劣。所以我们正在努力推动标准化平台的建设和共享数据的方法学,希望能够开发出一种人们普遍认可的评估方法。
研讨会信息
CARLA Autonomous Driving Challenge
组织者:German Ros,Vladlen Koltun,Felipe Codevilla,Antonio M. Lopez
信息链接:
https://carlachallenge.org/
关注Robin.ly “Leaders In AI” Podcast
收听更多英文访谈

相关阅读

嬴彻科技CEO马喆人:构建智能卡车物流网络,引领自动驾驶落地



更多CVPR访谈视频将陆续上线。关注Robinly公众号,及时获得内容更新和活动通知。


















 1543
1543

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









