







层次结构
- 寄存器
- cache
- 主存
- 外存
- 一致性原则:不同层次存储器中,相同信息保持一致
- 包含性原则:内层信息含于外层信息
主存
按存储元件分类
半导体
磁性材料
光介质
按存取方式分类
随机存取存储器RAM
- 半导体存储器
- 是否破坏性读取
- 动态存储器DRAM
- 用电容存bit信息
- 破坏性读取
- 读出时电荷释放,原信息丢失
- 电荷会自然流失,需要定时刷新补充电荷
- 集中刷新
- 停止读写,逐行刷新
- 分散刷新
- 定时周期刷新
- 异步刷新
- 集中+分散
- 集中刷新
- 破坏性读取
- 快速分页组织
- 一般用于低速大容量半导体存储器
- 主存
- 用电容存bit信息
- 静态存储器SRAM
- 用触发器存bit信息
- 无需读后再生
- 无需刷新
- 一般用于高速小容量半导体存储器
- cache
- 用触发器存bit信息
-
DRAM SRAM 存储信息 电容 触发器 破坏性读出 是 否 需要刷新 是 否 送行列地址 分两次送 同时送 访问速度 慢 快 集成度 高 低 发热量 小 大 存储成本 低 高
- 动态存储器DRAM
顺序存取存储器SAM
- 磁带
直接存取存储器DAM
- 磁盘
按内容存取存储器CAM
- 相联存储器AM
- 按位标识逐位比对
按可更改性分类
可读可写存储器RAM
均是易失的
只读存储器ROM
随机存取
均是非易失的
按易失性分类
非易失(不挥发)存储器
- ROM
- 磁表面存储器
- 光存储器
易失存储器
- 所有的RAM
- cache
外部辅助存储
磁盘



访问耗时主要来自寻道时间
写入数据同时计算校验码一起写入

2×4×2000×3000×512B=24GB
- 2:1个盘片有2面

1转1/7200分=1/120秒

磁盘调度算法
使平均寻道距离最短
FCFS
先请求访问磁盘的进程先处理
进程足够多时和随机调度性能相近
SSTF
Shortest-Seek-Time-First
选择从当前磁臂位置最近的访问请求位置
不一定有最短的平均寻道距离
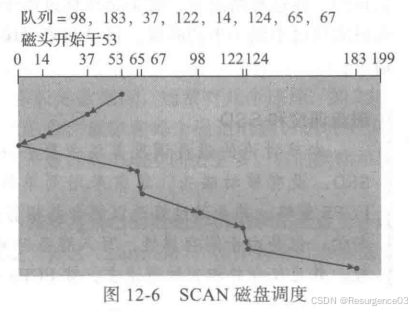
SCAN
磁臂先向一个方向处理,移动到头后调头,再向另一个方向处理移动到头
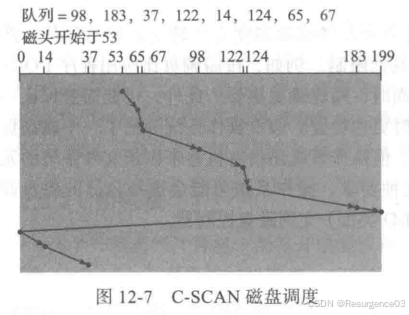
C-SCAN
磁臂向一个方向处理,移动到头后调头回到起点,如此往复
LOOK
只移动到最远一个请求的SCAN修正
C-LOOK
只移动到最远一个请求的C-SCAN修正
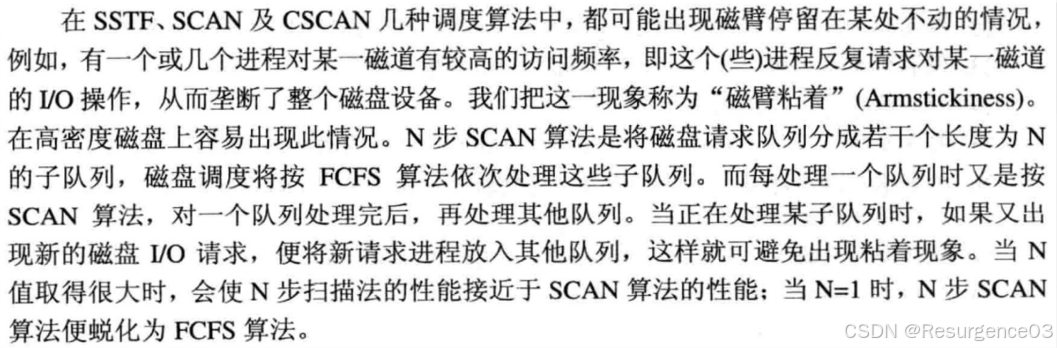
N步SCAN
磁头黏着现象:SSTF、SCAN、CSCAN由于新的密集I/O请求导致磁头在某处停住不动
- 将磁盘请求队列分为长度为N的子队列
- 子队列间按FCFS算法处理
- 子队列内按SCAN算法处理
FSCAN
- 将磁盘请求分成两个队列
- 交替使用SCAN处理其中一个队列
- 在处理一个队列时新出现的请求均归入另一队列中,下次扫描处理
- N = 2的N步SCAN
磁盘冗余阵列RAID

- 数据安全性
- 6最高
- 1其次
- 2,3,4,5一个层次
- 0最差
- I/O速率
- 1,2,3快于单个磁盘
- 4,5,6慢于或近似单个磁盘

RAID0
- 没有冗余
- 条带化
- 容量大速度高,可靠性低
RAID1
- 冗余备份,复制所有信息
- 无校验
- 读性能翻倍
- 读请求可由含数据的任何一个磁盘提供
- 写性能下降
- 并不是折半,可并行执行,由慢者决定
- 成本高,很可靠
RAID2
- 并行访问
- 驱动器间同步
- 工作单位为字(字节)
- 小条带分布交叉
- 使用海明校验冗余
- 校验盘与数据盘成正比
- 数据传输率高
- 大I/O快
- I/O响应慢
- 小I/O快
- 开销过大,不再使用
RAID3
- 并行访问
- 小条带分布交叉
- 每个字计算1个校验位
- 只使用一个冗余盘
- 重构
- 数据传输率高
- 大I/O快
- I/O响应慢
- 小I/O快

RAID4
- 独立访问
- 无需驱动器间同步
- 大数据块交叉
- 只使用一个冗余盘
- 重构
- 小I/O有写损失

RAID5
- 独立访问
- 大数据块交叉
- 将校验位循环均匀分布在所有驱动器上
- I/O快
- 被广泛使用
RAID6
- 独立访问
- 大数据块交叉
- 将校验位循环均匀分布在所有驱动器上

- 双维块奇偶校验
- 允许双盘出错
- 高度可靠
RAID7
- 带cache的RAID

Flash闪存
- 高密度非易失性读写存储器
- 电擦除可编程ROM替代品,可存储BIOS
- 编程:充电
- 擦除:放电
- 读取
- 存储元件为MOS管
SSD固态硬盘
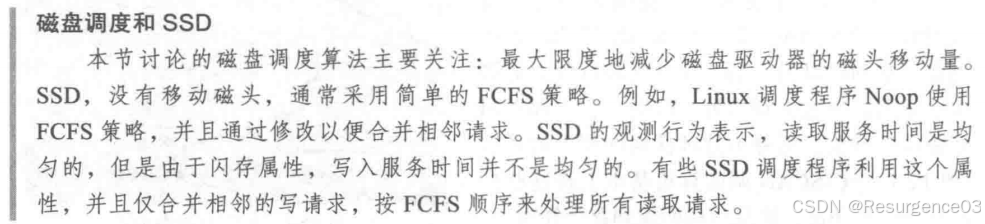
- 存储介质为闪存颗粒
- 数据按页进行读取
- 闪存芯片-区块-页
- 对某页写前,必须擦除该页所属的整个区块
- 写入时按顺序写入
- 只有有限的读写次数
- 闪存翻译层FTL
- 将逻辑磁盘块映射为物理存储块
- 均化磨损电路
- 将擦除操作平均分布,延长使用寿命
数据校验
码距:两个合法二进制码之间最少不同位数量
- 码距为1,即任何两个二进制码间最少有1位不同,平凡情况,无校验能力,检错位数为0
- 码距为2,检错位数为1
- 纠错理论:
- L为码距
- D为检错位数
- C为纠错位数
奇偶校验
用于并行传输
在数据位以外增加1位校验位,使得总共1的数量为奇数或偶数
- 码距为2
- 检错位数为1
- 纠错位数为0
海明Hamming校验
用于并行传输





若无错,S1 = S2 = S3 = S4 = 0
- 含总校验位
- 码距为4
- 检错位数为2
- 纠错位数为1
- 不含总校验位
- 码距为3
- 检错位数为1
- 纠错位数为1
- 对于能检测d位错误的海明码,码距不小于d+1
- 对于能纠正d位错误的海明码,码距不小于2d+1

利用排列组合直接计算即可。
循环冗余校验CRC
用于串行传输
将m位的bit串看作一个m-1多项式的系数,从左到右从高到低
- 换言之,m位的bit串到系数域为0-1域的多项式的双射
0-1域上的多项式运算
- f(x) + g(x) = f(x) XOR g(x)
- f(x) - g(x) = f(x) XOR g(x)
- 除法同多项式大除法
- 抓住最高位
双方约定r次生成多项式G(x),对于m+1位位串对应的多项式M(x),设M(x)诱导的带CRC校验码多项式为r+m次多项式M1(x)=x^rM(x)
由多项式带余除法,存在唯一的r(x),q(x),使得M1(x) = q(x) G(x) + r(x),且r(x)的次数不高于r-1
换言之,r(x)将可对应于一个r位位串,M1(x) - r(x)可被G(x)整除
由于M1(x)的最低r次项系数均为0,M1(x) - r(x) = M1(x) XOR r(x) = M1(x) + r(x) = 在M(x)对应的m+1位位串后拼接上r(x)对应的r位位串
- 接收方收到带CRC的位串后除以G(x)
- 能除尽表明(在CRC检测范围内)没有错误
- 去掉位串最后G(x)次数位即得原位串
Cache
CPU<----------->主存
程序的局部性原理

- 行
- 块
- 一行有多长
- 有效位:标记该行是否被占用中
- 命中
- 命中率Hit Rate
- HR=命中次数/访问次数
- 影响因素
- 容量
- 命中率-容量为不足对数函数
- cache超过32kB后,整体性能不会显著提高
- cache块大小
- cache块太小,容易局部性受限
- cache块太大
- cache总行数会变小
- 单次装填成本增大
- 容量
- 命中时间=访问cache块时间
- 命中率Hit Rate
- 缺失
- 缺失率Miss Rate
- MR=1-HR
- 缺失损失=替换cache块时间+传输给CPU的时间
- 原因
- 必然缺失
- 第一次访问或刚开机
- 容量缺失
- cache容量不够
- 冲突缺失
- 两块不同的内存块映射到相同的cache块
- 直接映射最明显(利用率低)
- 无效缺失
- 必然缺失
- 缺失率Miss Rate
- 平均访问时间=HR×命中时间+MR×缺失损失
- 缺失率低未必平均访问更低
- 块更大意味着需要更多时间去装填数据块
- 应当追求使得平均访问时间最低的块大小,而非缺失率最低
- 缺失率低未必平均访问更低
映射方式
- 直接映射:守序
- 全相联映射:混乱
- 组相联映射:中立
直接映射
亦称为模映射
cache行号 = 主存块号 % cache行数




- 简单,命中时间短
- 利用率低、命中率低
全相联映射
- 相联存储器:按内容访问
- 全相联:比对要遍历全cache
主存块可装入任何一个cache行中

- 利用率高,冲突率低
- 使用成本太高
- 每次比对都要遍历cache
组相联映射
x路组相连
- cache一个组有x行
- 主存每组有cache行总数块
- cache一组内可以存放x组主存块
- 组间模映射,组内全映射


命中率比较
- 在cache大小不变的前提下
- 2路显著优于直接
- 4路优于2路,但远没有上者显著
- 大小为N,采用直接映射的命中率与大小为N/2、采用2路组相联命中率相当
替换策略
- 直接映射没有选择
- 全/组相联映射
- 最近最少使用LRU
- 先进先出FIFO
- 随机RAND
一致性保持
写直达
一旦cache更新,立刻更新主存
拖后写
cache被替换时再写回主存
多级Cache
- 多级Cache
- 指令Cache+数据Cache
- 流水线考虑
Cache接入体系结构
- 侧接法:如同普通IO
- 隔断法:插入原总线


虚拟存储器
主存<----------->外存
MMU
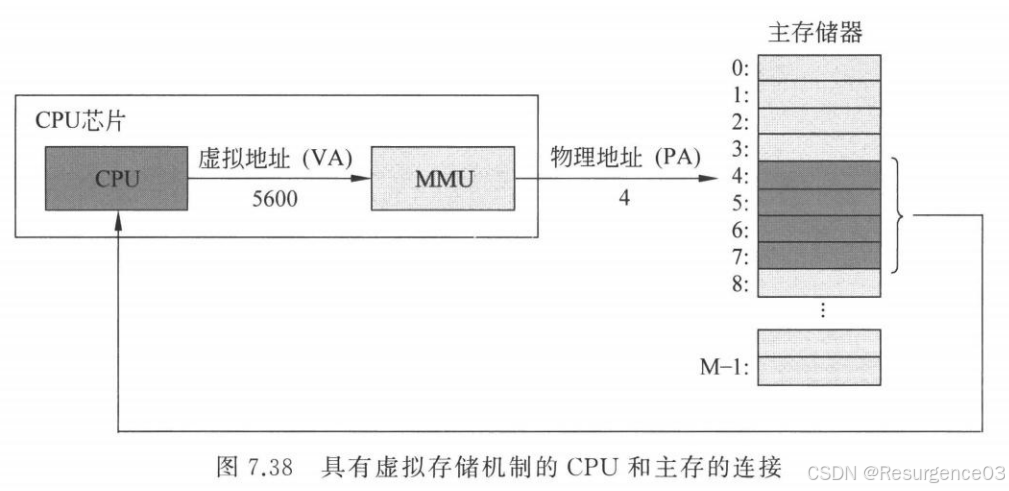
- 硬件完成从VA到PA的转换
分页式虚存
页表
存储由页-页框号的全相联映射产生的页号转换关系
- 存放在主存中
- 读取可用TLB加速
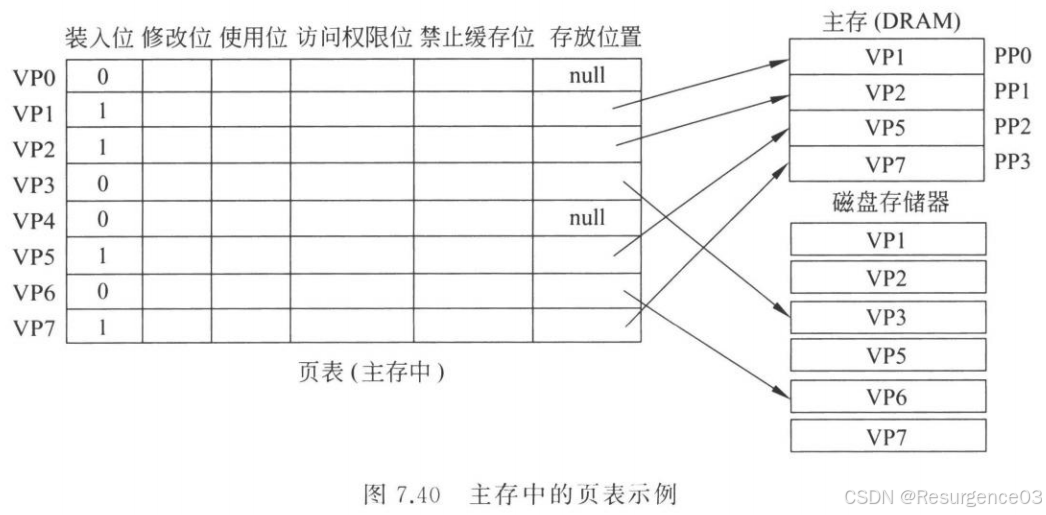
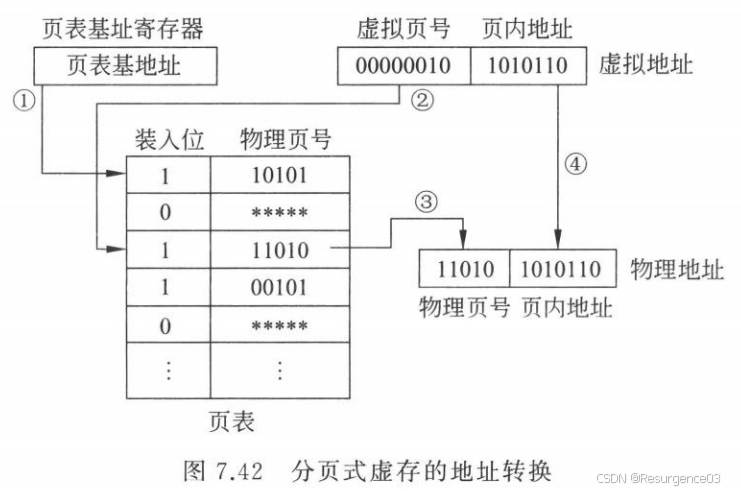
- 页表(虚拟页号) = 物理页号
- 虚拟页号位数决定页表大小
- 虚拟页内偏移 = 物理页内偏移
快表TLB
存放在Cache中的页表的一部分
- 虚拟页号 = tag || cache组索引
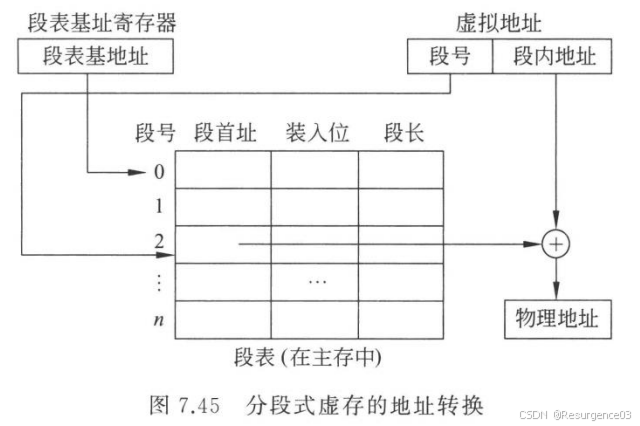
分段式虚存
基于Cache和虚拟存储技术的CPU访存过程
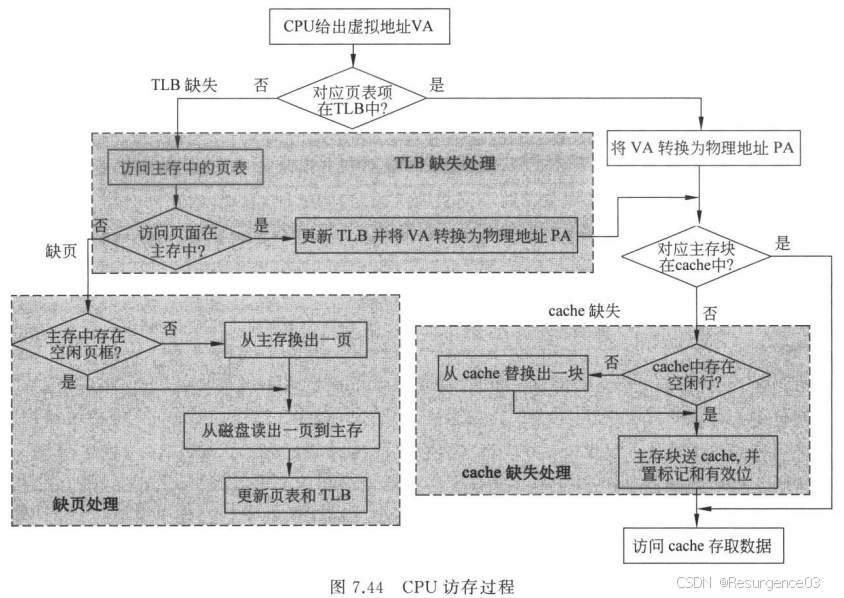
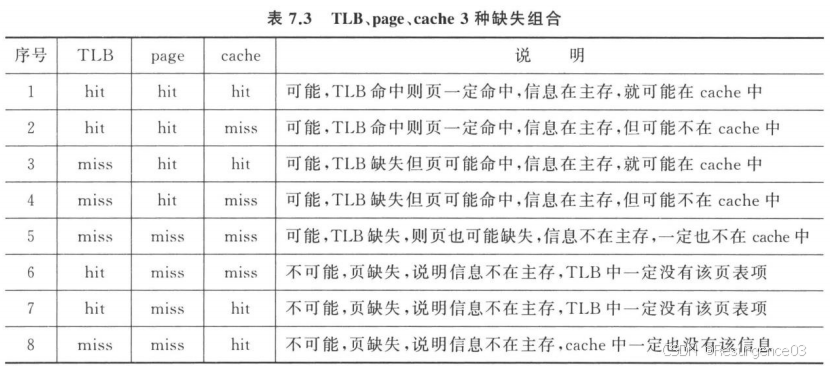
- cache缺失:硬件处理
- 页表缺页:缺页处理,OS
- TLB缺失:硬软件均可

















 501
501

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









