 前端面试宝典
前端面试宝典




 针对当前大裁员背景,为帮助前端工程师提升技术、顺利通过面试,特整理《前端面试上岸手册》,涵盖最新前端面试题及答案,适用于初中级前端工程师。
针对当前大裁员背景,为帮助前端工程师提升技术、顺利通过面试,特整理《前端面试上岸手册》,涵盖最新前端面试题及答案,适用于初中级前端工程师。
大裁员背景下,没什么比辞职后找不到工作更扎心!
在行情好转前,前端程序员只能“猥琐发育”,不轻易跳槽,同时要修炼内功:
对八股文、底层源码、重点项目等进行查缺补漏,静待行情好转抓住机会!
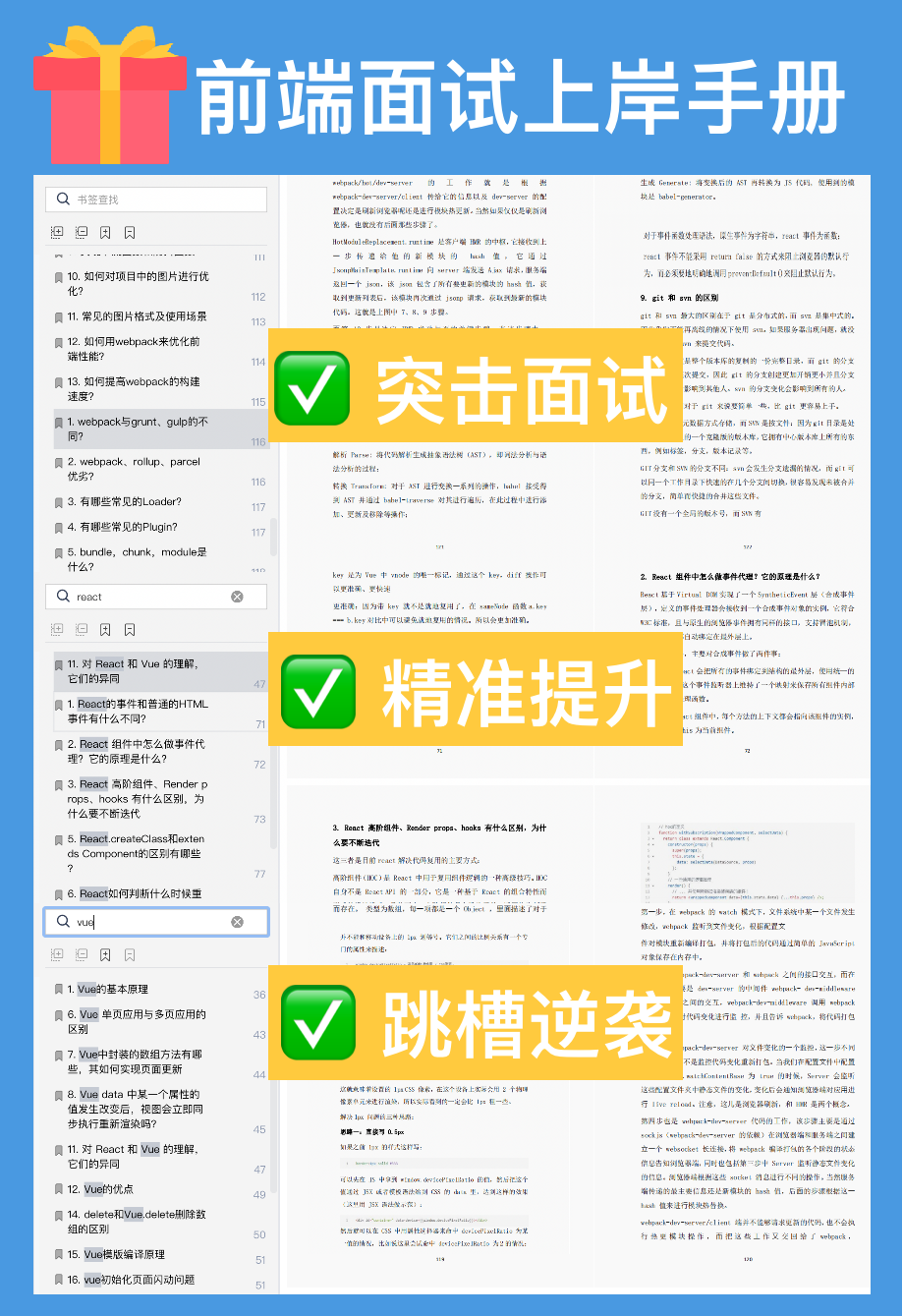
为帮大家在“就业寒冬”期更好的稳步提升、精进技术,以便保全自身、甚至跳槽加薪,这里分享一份《前端面试上岸手册》
手册由字节3-1前端面试官路白联合数家大厂面试官编辑整理,涵盖2022年最新最全面的大厂前端面试考点,共计180道!限时免费开放下载!
扫码直接领取(含答案)
适合初中级前端工程师
精准学习拒绝收藏吃灰
这份资料和网上找的有什么区别?
网上找的资料杂乱无章没答案,只能放在收藏夹吃灰
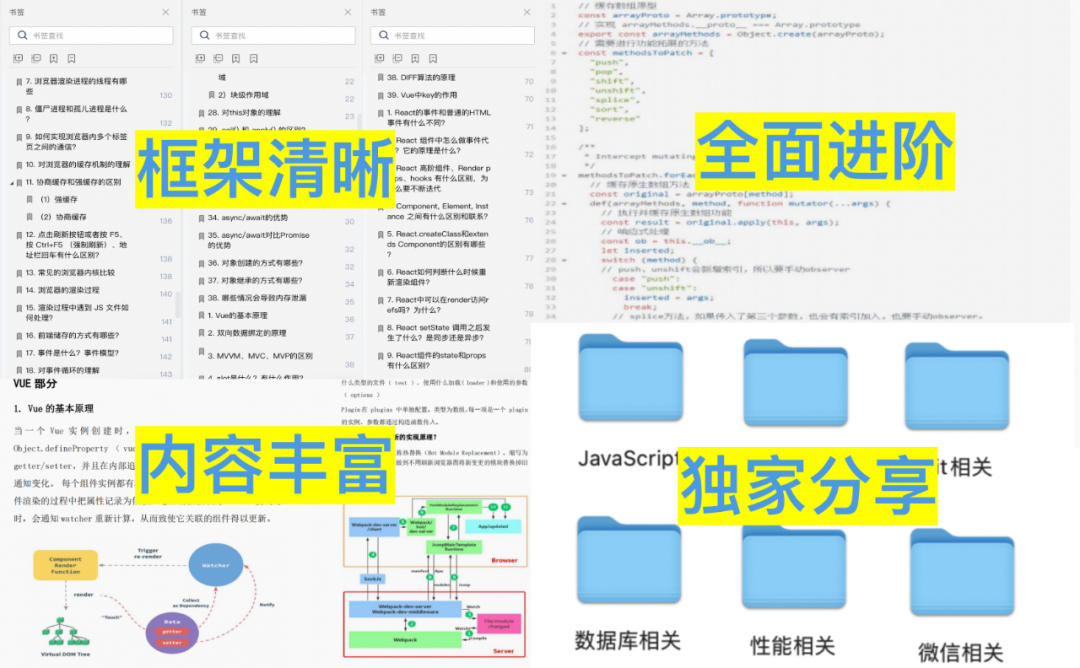
而这份资料包,由多名一线大厂前端面试官联合整理,含完整版框架、流行技术栈等,可用来突击面试拿offer,也可用来精准学习就业提升!

全面进阶 内容涵盖中高级
这份资料对标字节3-1前端工程师应具备的技能,详细文档结构如下:前端小伙伴可扫码领取一份(定期更新)。
Html
CSS
JavaScript
Vue3
React
Webpack5
浏览器面试题
计算机网络部分
前端工程化……等内容
前端面试上岸手册
领取后帮你
突破面试瓶颈 明晰职场规划
进阶为高级前端工程师
扫码直接领取(含答案)
点个在看,找小哇内推大厂~

















 1196
1196




 到【灌水乐园】发言
到【灌水乐园】发言







