



Linkage Mapper 使用 生态源-生态廊道-夹点
由于时间问题,大家更想看哪一章内容,我会尽快更新
1. 理论
2. 数据收集与预处理
一般流程:
(1)裁剪\掩膜,注意要比你研究区空间范围大一点。因为遥感数据空间分辨率不会完全一致,这是我多年的习惯
(2)重投影:选择一张基准影像。在投影时候,选择投影坐标系,空间分辨率选择与实际最接近的,浮点型数据选择双线性,土地利用(整形数据)选择最近邻。
(3)重采样:调整所有数据空间分辨率一样。
(4)裁剪\掩膜,选择一张基准影像,设置为处理范围、掩膜范围、捕捉栅格。这样所有数据行列会一一对应。
3.生态源地构建
MSPA,选择林地和草地
4.阻力面构建
AHP权重分析
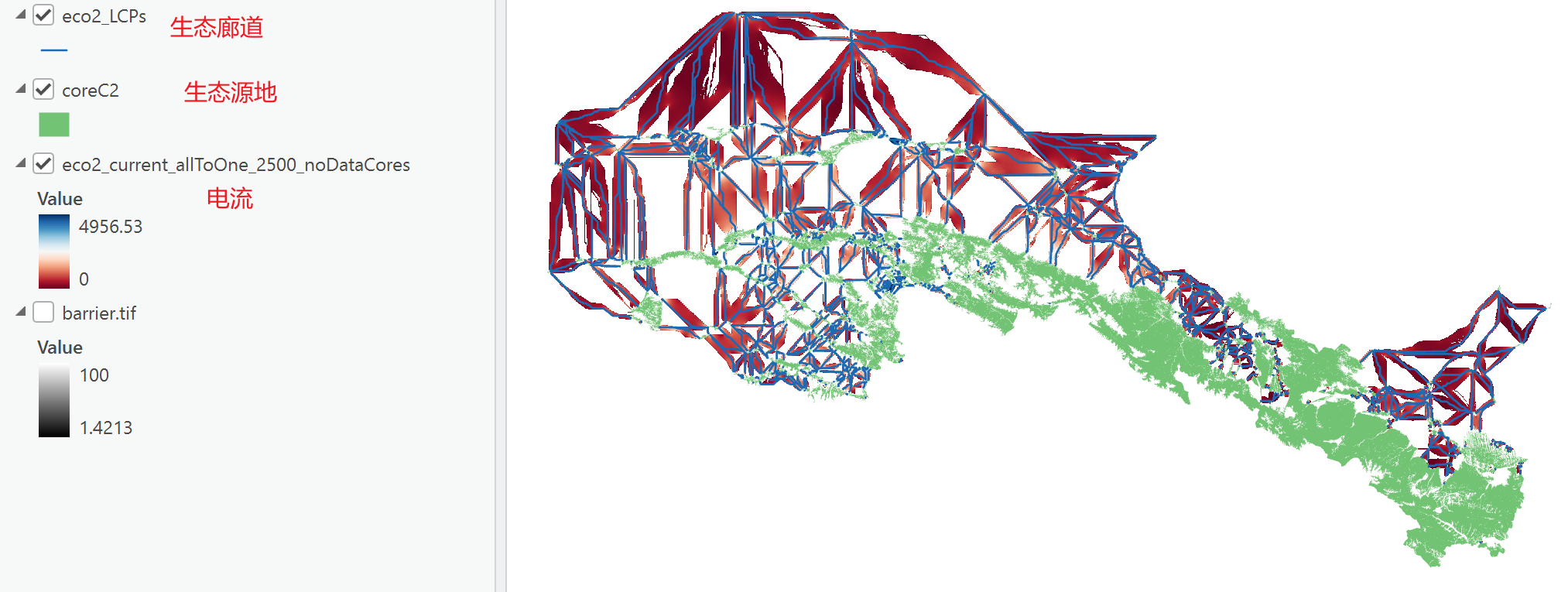
5.生态廊道构建
输出文件:XXX(你的生态源地名)_LCPs (Least-Cost Paths,最小成本路径)
属性:
Euc_Dist:起点核心区到终点核心区之间的 直线距离(米)。不考虑阻力,仅是几何距离。
CW_Dist(Cost-Weighted Distance,成本加权距离):考虑阻力面的“等效距离”,基于阻力面扩散出来的最小累积成本,是成本,根据你的阻力面累加。例如:如果一个像元阻力值为 10,走 100 米,成本是 1000;换一条路阻力值为 2,走 200 米,成本是 400。Linkage Mapper 就会选成本更小的路径。
CW_to_Euc_Dist_Ratio:成本/欧氏距离比值,用于衡量阻力对路径的影响。比值:≈1 表示路径阻力低、接近直线;远大于 1 表示需要绕行或阻力较大。
Shape_Length:这是 shapefile (线要素)的几何属性,和 LCP_Length 一致,通常代表这条廊道线的几何长度。(GIS自动维护矢量几何属性,通常接近于LCP_Length)
优先用: 最小成本路径(Least Cost Path)在地理空间中的实际长度(矢量线长度)。
cwd_to_Path_Length_Ratio:表示一条廊道的 阻力成本(CW_Dist) 与 几何路径长度(LCP_Length) 的比值。
-
如果比值 ≈1:说明这条路径经过的阻力环境很低(成本和几何长度差不多),走直线的成本和走廊道差不多。
-
如果比值 ≫1:说明这条路径穿过的区域阻力很高,尽管几何距离不算远,但成本代价非常大。
-
可以用来比较不同廊道的“通行难易程度”
6.生态夹点构建
生态夹点(pinch points):
-
是生态廊道中 流量高度集中的关键区域。
-
在 Linkage Mapper / Pinchpoint Mapper 中,生态夹点对应 累积电流密度 raster 的高值区域。
-
生态意义:
-
物种迁徙过程中几乎所有路径都必须经过的“瓶颈”或“狭窄通道”。
-
这些点对景观连通性影响巨大,一旦受阻或破坏,可能导致核心区间生态隔离。
-
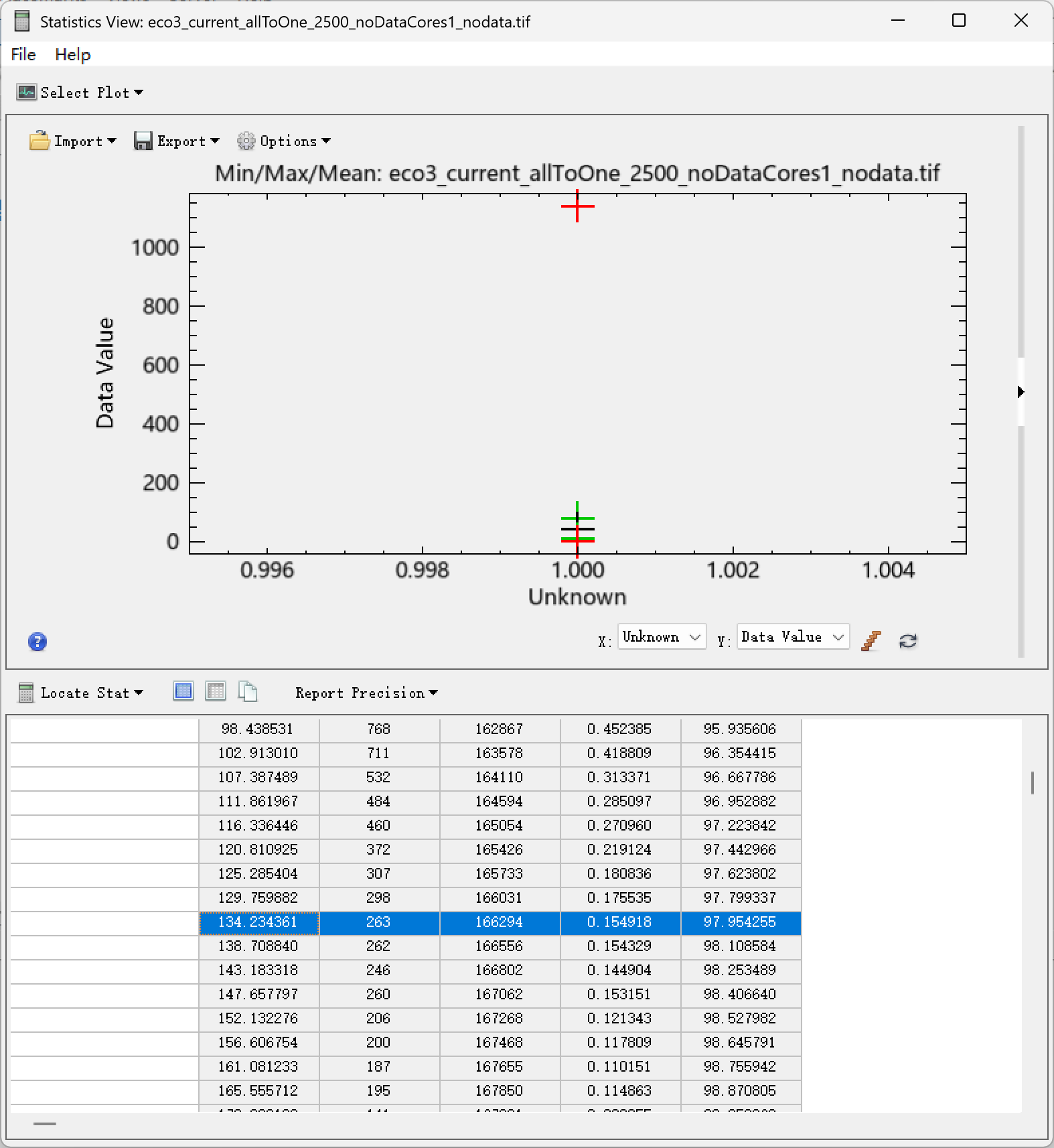
pinchpoints 工具,生成文件在:pinchpoints.gdb
| 部分 | 含义 |
|---|---|
| XXX | 项目/研究区名称 |
| current | 这是 累积电流密度(current density) raster,单位通常是无量纲或 A(电流) |
| allToOne | 所有核心区对某个核心区的累积电流计算方式(All-to-One 模式),意味着每条路径的电流都是汇向某个核心区 |
| 2500 | 栅格大小或像元分辨率(可能是 2500 m × 2500 m) |
| noDataCores | 输出时排除了没有数据的核心区(NoData cores) |
做法:生成电流密度,将0值设置为nodata,via 复制栅格——放到ENVI中,因为ENVI有快速统计,可以找到第98%分位数像元。随后,在GIS栅格计算器中提取,CON(栅格>134,1)
得到的结果,先用Conversion工具—From Raster转化为多边形——随后,在数据管理工具中找到Feature,使用Feature to Point,得到生态夹点
6.生态障碍点构建
7.成果图
...
N.问题汇总
欢迎大家私信,评论,有价值的问题我会收录。祝大家成功
(1)Build Network and Map Linkages 汇总
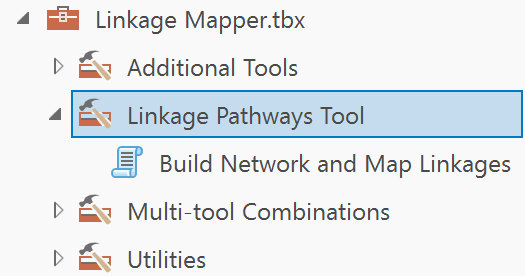
一个月速成了源-生态廊道-夹点,记录一下实验遇到的问题
1)ArcGIS pro 报错,有报错关于python无法提取的问题。请检查一下ArcGIS pro python环境,能不能正常打开。我的3.4版本,一打开python就会初始化卡死,这个问题卡了我一天。我重装了3.5版本,能打开python环境,这个问题就再没出现过。
2)影像空间分辨率过高。我做半个省的范围,30m空间分辨率,3000个源地根本跑不出来。建议阻力面空间分辨率250~1000,(我选用了500,运行10个小时)。源地100~500个(我的433)
3)核心区(源地)需要新建一列,短整型,可以=FID+1。
(2)Barrier Mapper 汇总
1)搜索半径过小
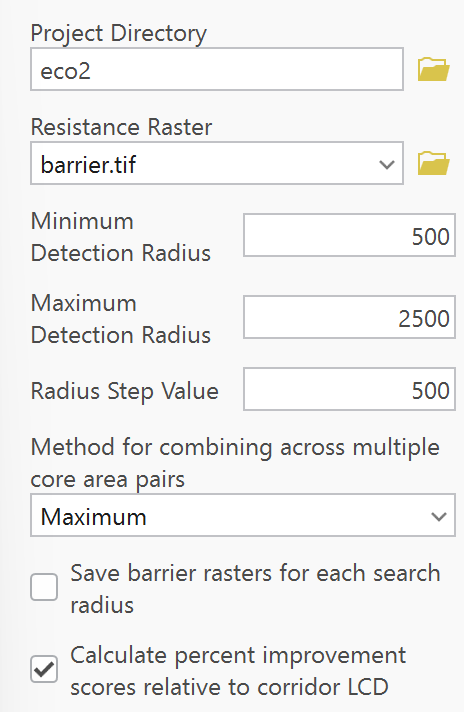
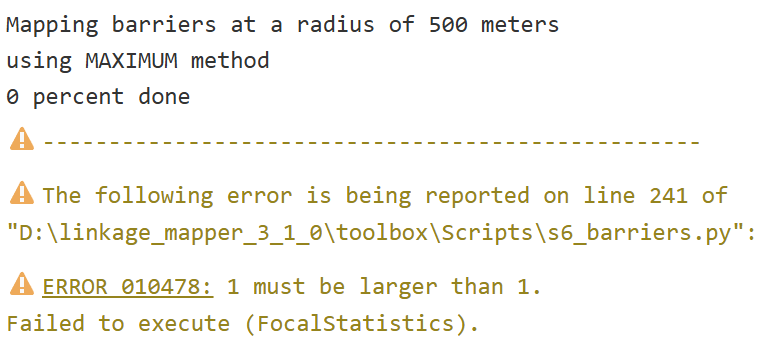
我的阻力面空间分辨率是500m。需要增加搜索半径。我用1.5个像元(一般会多半个像元,最近邻的定义)750,750*n,750

















 899
899

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









