







一、机器人的应用场景
在工业需要精准控制和快速操作,工业机器人不仅能够做到,而且能够在较短的时间内完成大量复杂的任务,与人工相比,机器人不仅速度更快,而且减少了误差,提升了产品的质量。
而且有许多危险的工作,让人来完成会导致许多危险情况的发送,这时机器人就能够代劳了。
二、硬件配置
1.jaka c5 机器人

2.JAKA app
三、所学程序
1.首先先设置坐标


用户坐标系是判断机器人整体所在位置的基本坐标,TCP是工具坐标系原点。两个坐标系确定机器人末端的位置。
2.设置一个位置变量,设置为法兰中心位姿,作为中间变量来切换回原点的路径

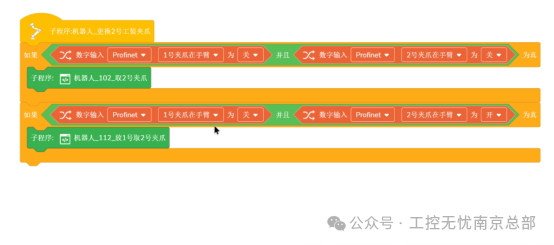
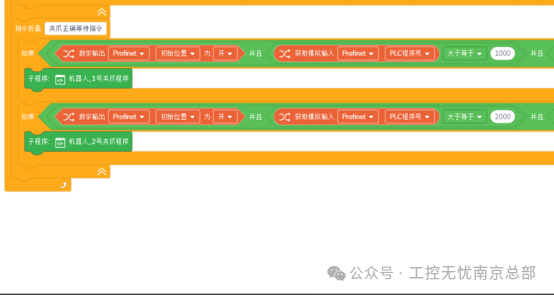
3.检测夹爪是否正确,一共有两种夹爪

就需要判断两种情况,一是夹爪一号的判断子程序和判断条件,如果 机械手在 初始位置 且下面所需要执行的程序是一号夹爪的动作,机械手上的没有或不是一号夹爪。

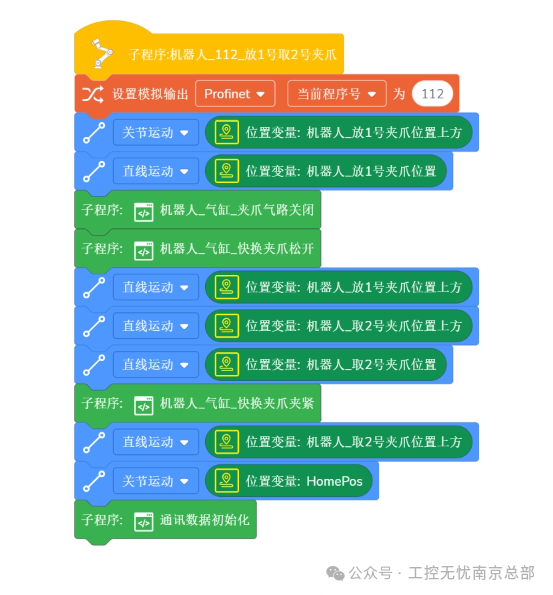
3.机器人_更换1号工装夹爪 子程序

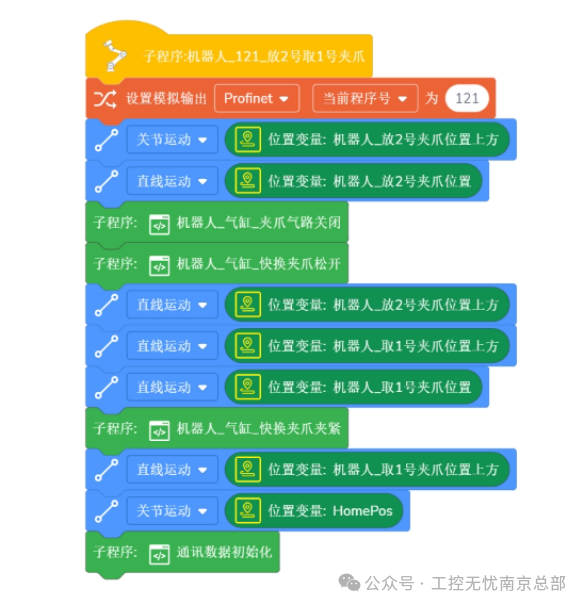
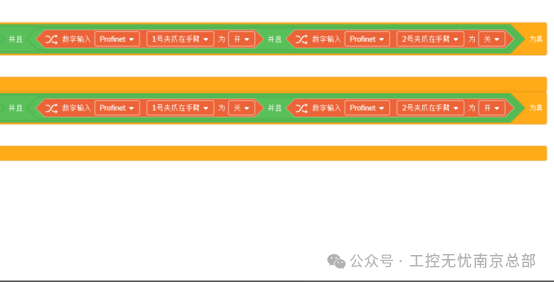
其中就需要判断两种情况,一种机器人上没有夹爪,还有机器人上是二号夹爪。所以程序上写的是:如果 一号夹爪和二号夹爪在手臂上的信号都为 关,直接取一号夹爪,
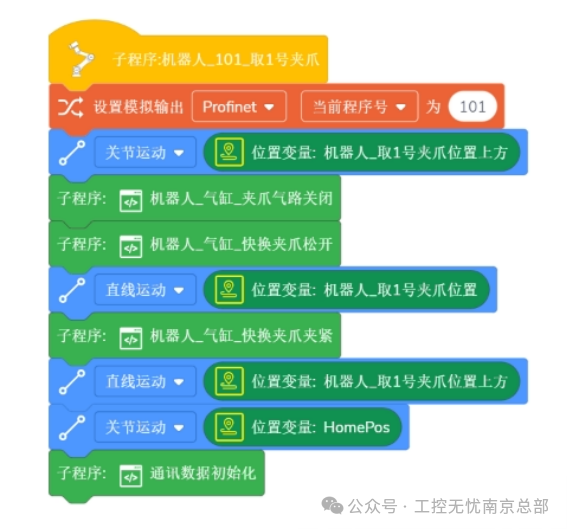
第二种情况:有二号夹爪,就先放下二号,再取一号。
4.子程序:机器人_夹爪气路关闭

在换夹爪之前需要保证控制夹爪的两路气阀都处于关闭状态,再进行换夹爪,先快换夹爪松开,再夹紧。最后通讯初始化,告诉plc动作完成。


二是夹爪二号的判断子程序和判断条件,如果 机械手在 初始位置 且下面所需要执行的程序是二号夹爪的动作,机械手上的没有或不是二号夹爪。同上的程序编写,无夹爪在机器人上和一号夹爪在机器人上。


夹爪选取完成后就可以依据夹爪的种类来完成特定动作,就像程序所写的机械手在初始位置且plc发出的指令是关于一号夹爪所能做的动作的任务编号,最后是一号夹爪在机械手上,不是二号夹爪在机械手上,这里还要写上二号夹爪不在位的程序是为了防止程序误判。同理,二号夹爪的程序所写的机械手在初始位置且plc发出的指令是关于二号夹爪所能做的动作的任务编号,最后是二号夹爪在机械手上,不是一号夹爪在机械手上。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











