






论文作者:Hiromu Taketsugu,Takeru Oba,Takahiro Maeda,Shohei Nobuhara,Norimichi Ukita
作者单位:Toyota Technological Institute;Kyoto Institute of Technology
论文链接:http://arxiv.org/abs/2503.17267v1
项目链接:https://iminthemiddle.github.io/EmLoco-Page/ https://github.com/ImIntheMiddle/EmLoco
内容简介:
1)方向:轨迹预测
2)应用:轨迹预测
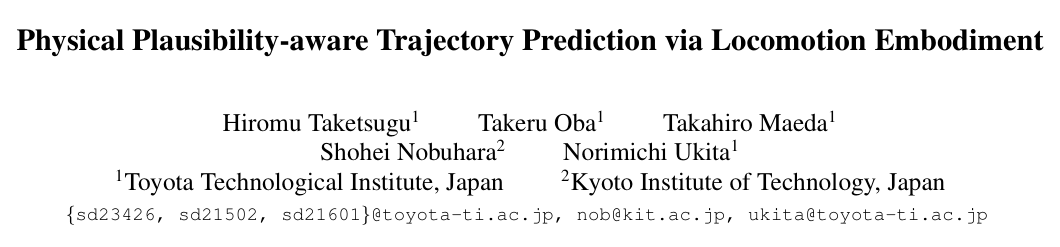
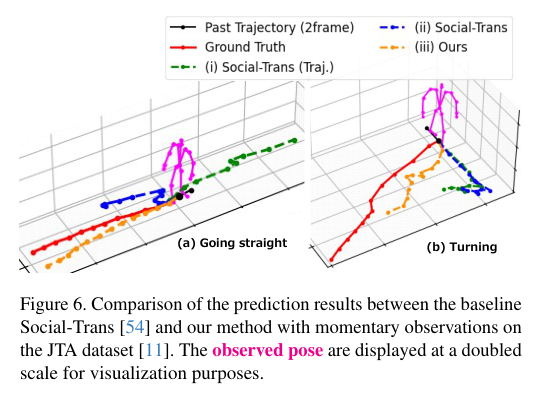
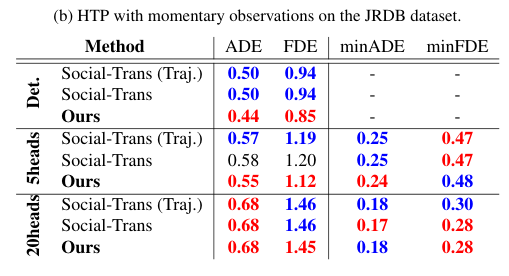
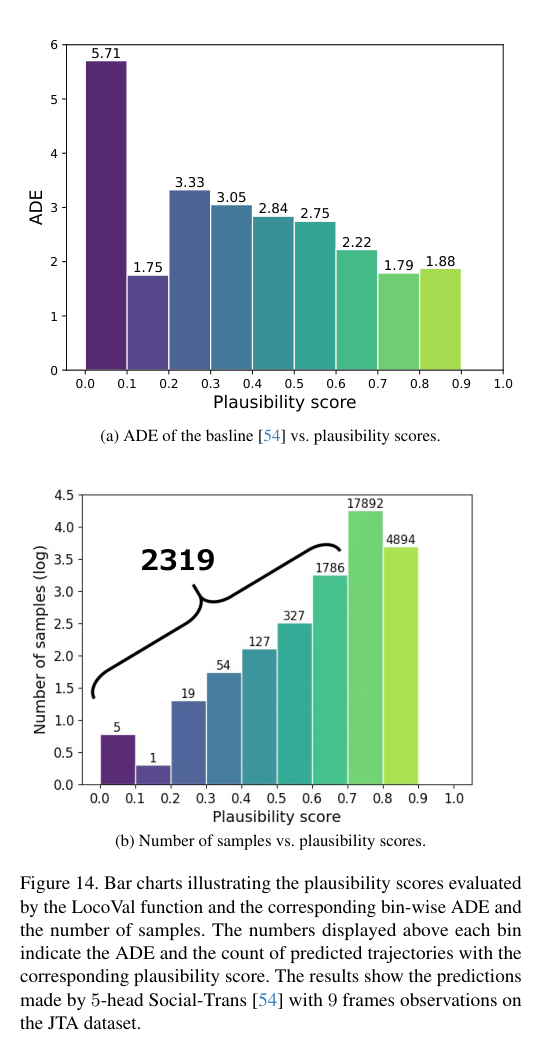
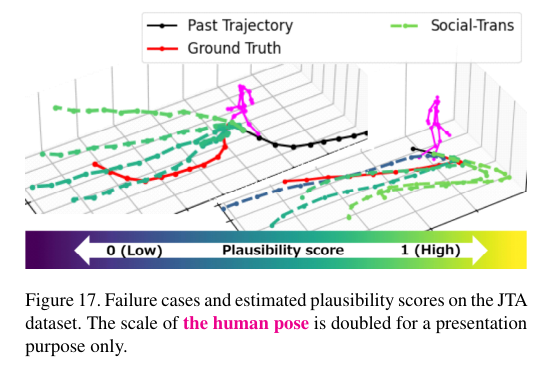
3)背景:人类能够仅凭瞬时观察到的人体姿态信息预测未来的运动轨迹。然而,现有的人类轨迹预测方法在利用人体姿态信息时通常是隐式进行的,导致预测结果可能不符合物理实际,出现不合理的预测。
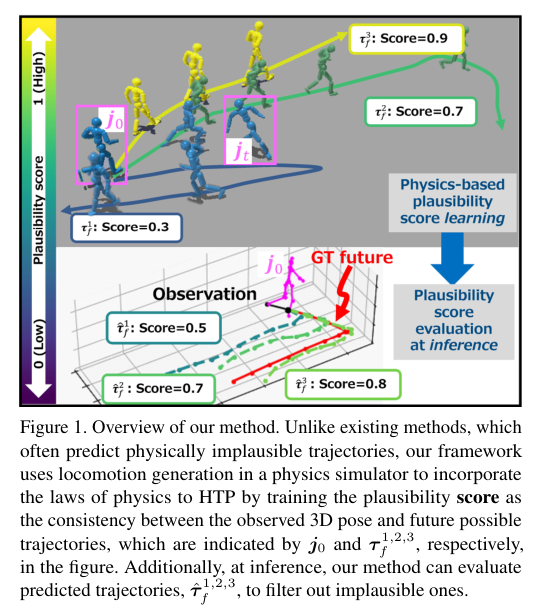
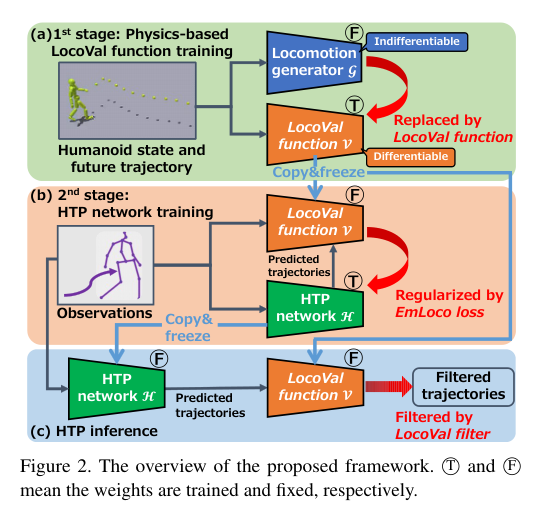
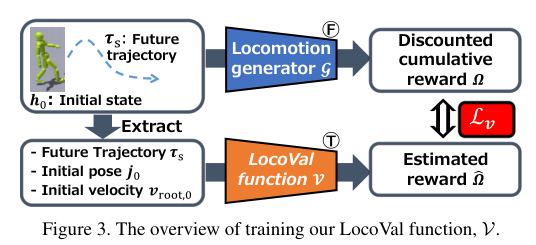
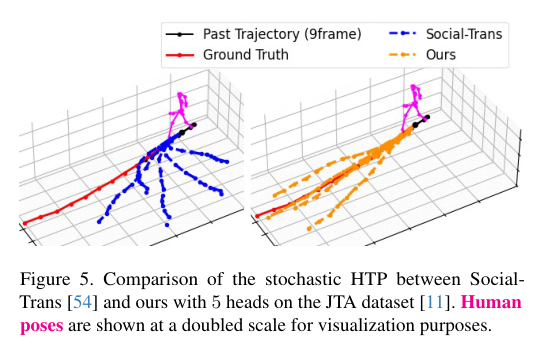
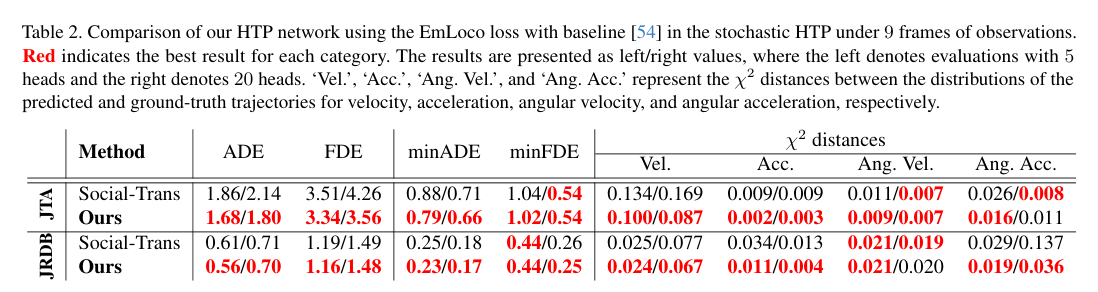
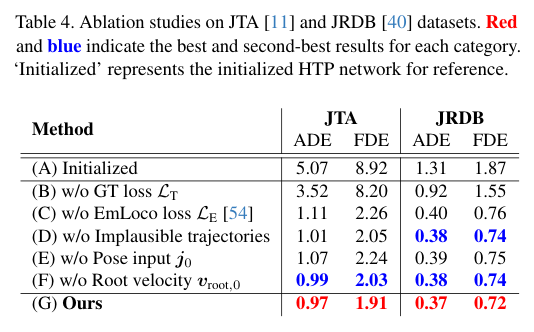
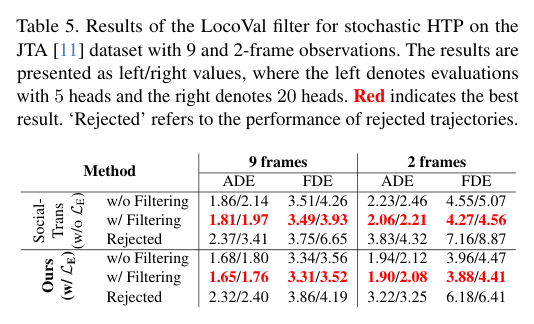
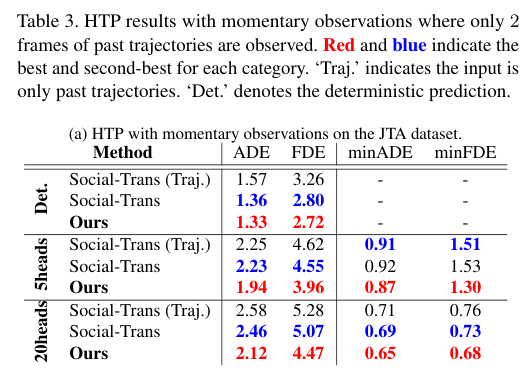
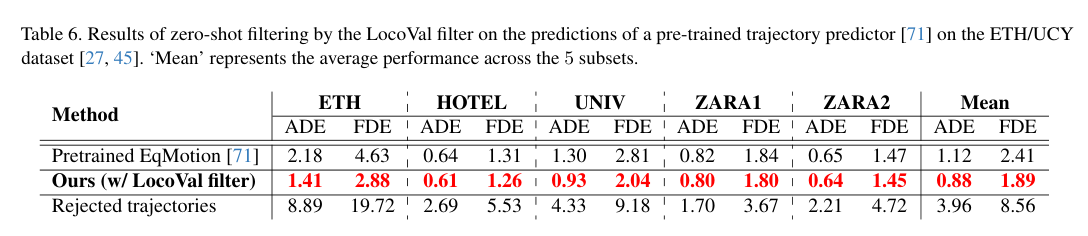
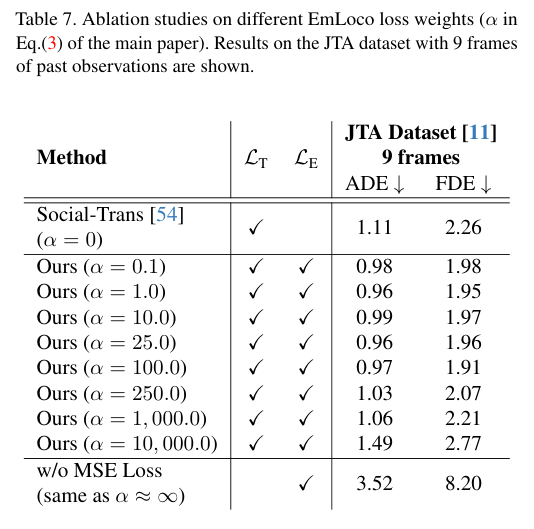
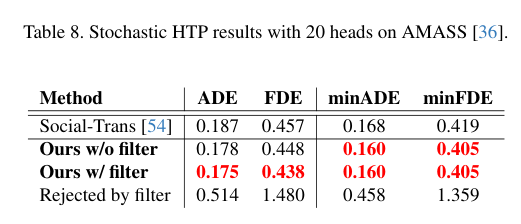
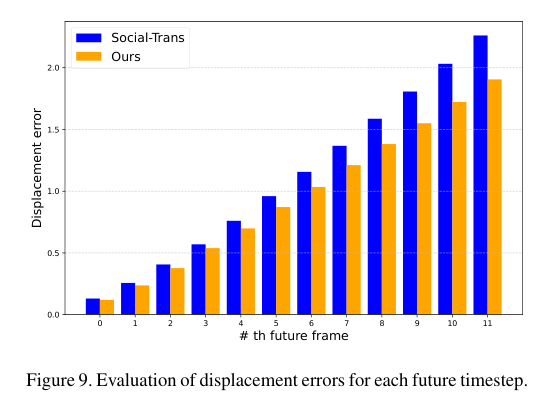
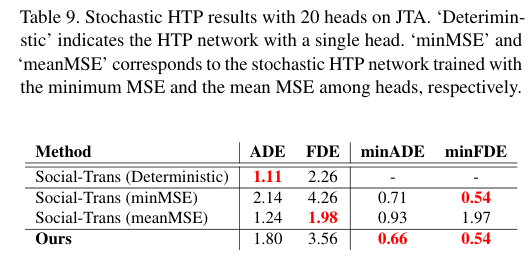
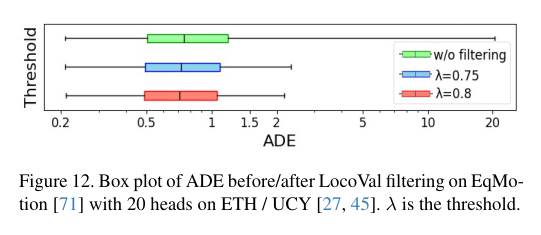
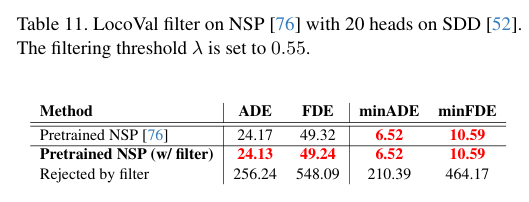
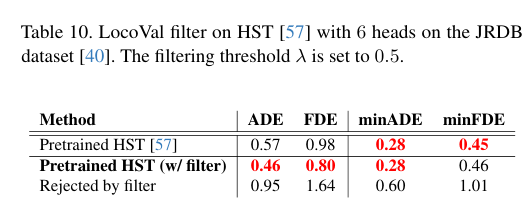
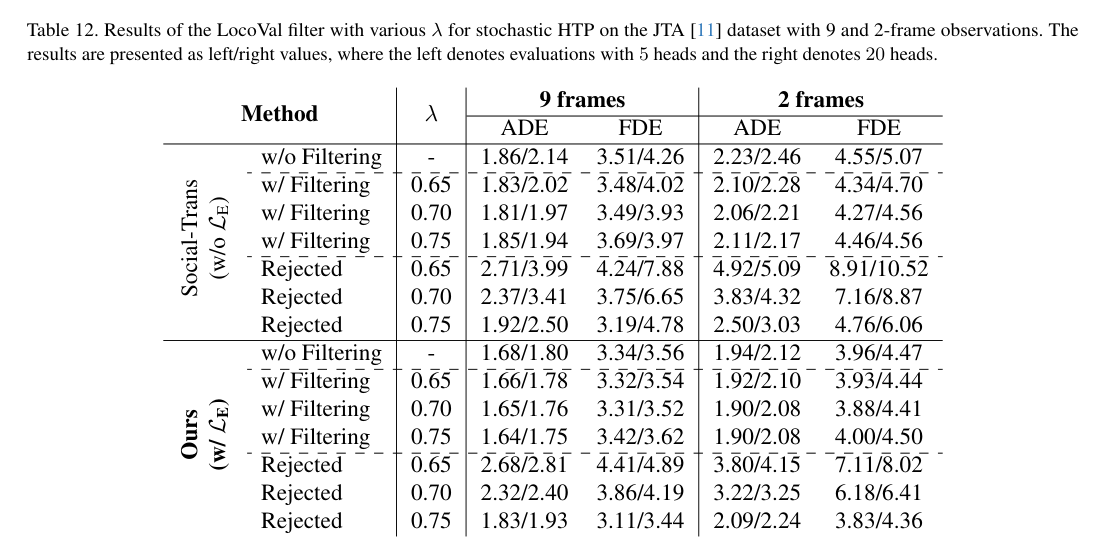
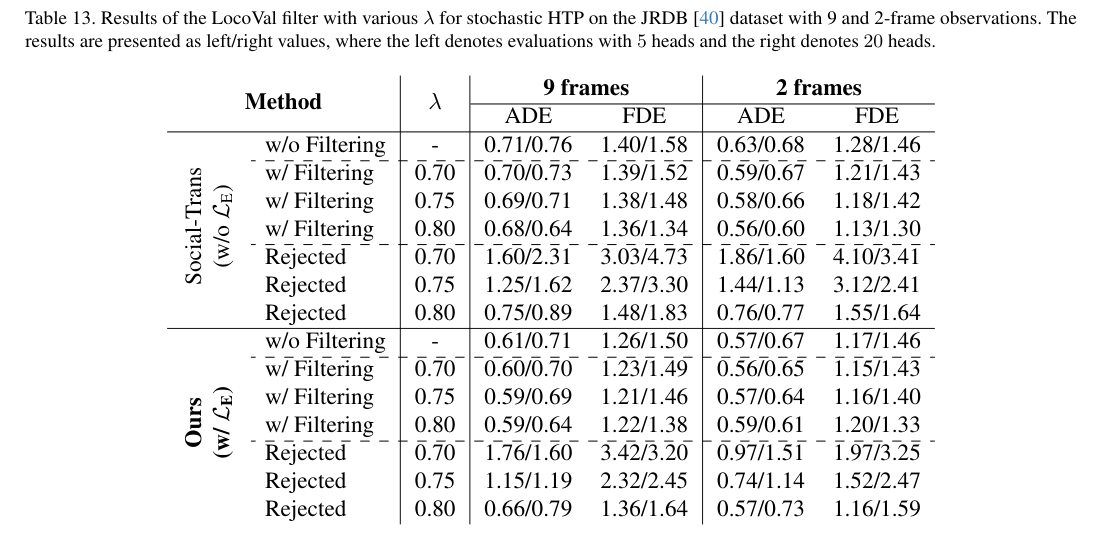
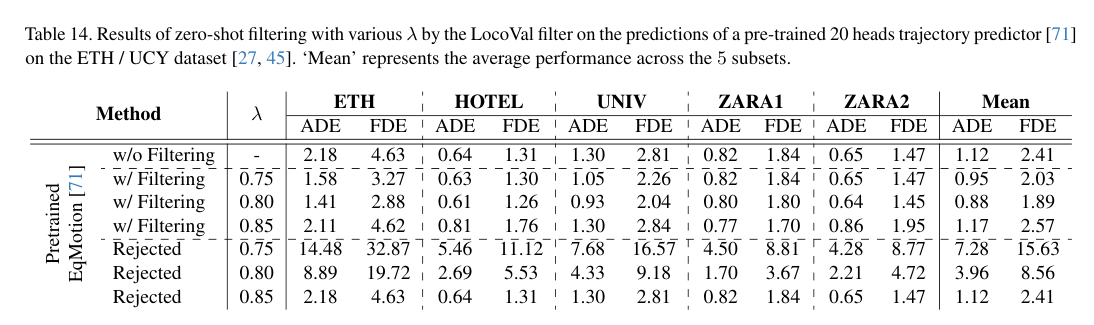
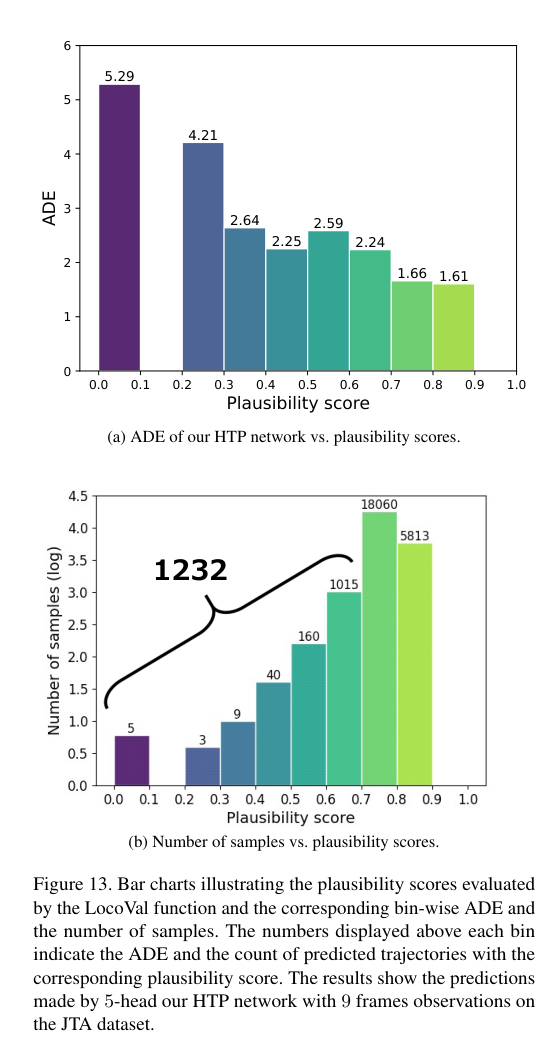
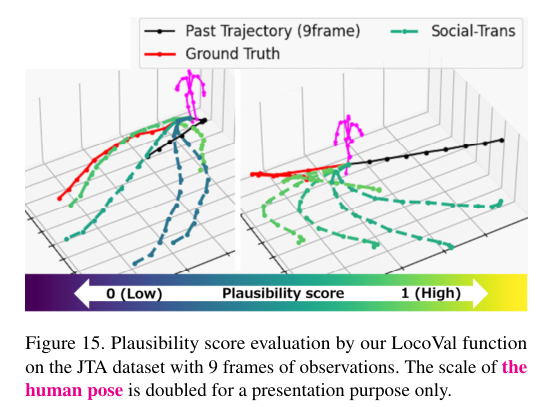
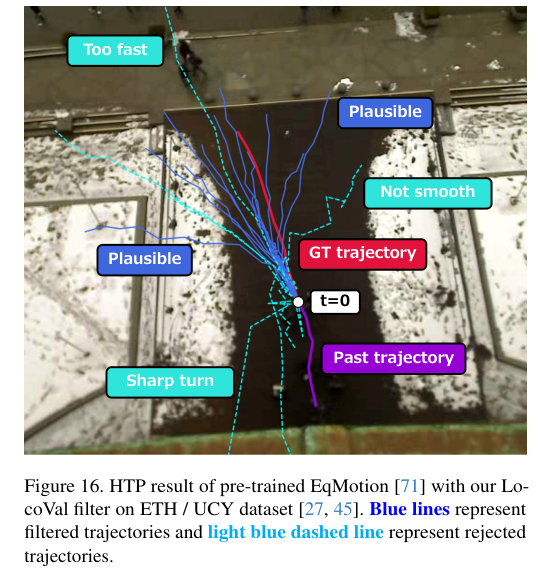
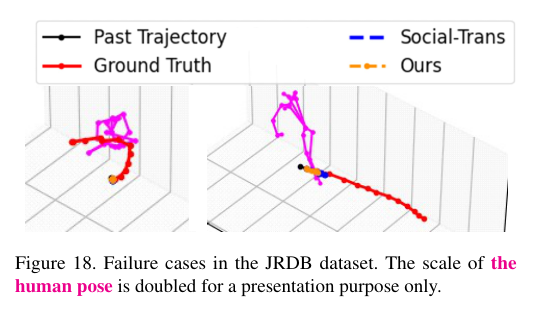
4)方法:为了解决这一问题,提出了“Locomotion Embodiment”框架,该框架通过物理学法则下的运动生成,显式评估预测轨迹的物理合理性。具体来说,采用不可微分的物理模拟器学习运动的合理性,但在训练过程中,使用可微分的“Locomotion Value”函数来驱动数据驱动的轨迹预测网络。提出的“Embodied Locomotion”损失函数有助于高效地训练使用多头机制的随机轨迹预测网络。此外,还提出了“Locomotion Value”滤波器,用于在推理阶段筛选不合理的轨迹。
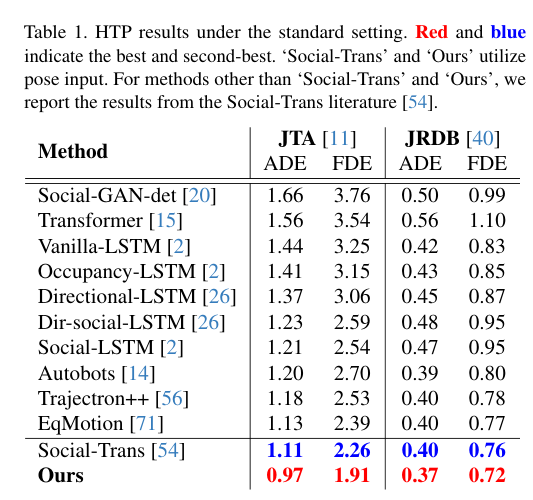
5)结果:实验结果表明,该方法显著提升了现有最先进的轨迹预测方法的表现,并且在多个数据集和问题设置下均表现出了优越的性能。代码:https://github.com/ImIntheMiddle/EmLoco




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











