






论文作者:Yifan Chang,Junjie Huang,Xiaofeng Wang,Yun Ye,Zhujin Liang,Yi Shan,Dalong Du,Xingang Wang
作者单位:Chinese Academy of Sciences;PhiGent Robotics;UCAS;Luoyang Institute for Robot and Intelligent Equipment
论文链接:http://arxiv.org/abs/2503.06237v1
内容简介:
1)方向:3D车道检测
2)应用:3D车道检测
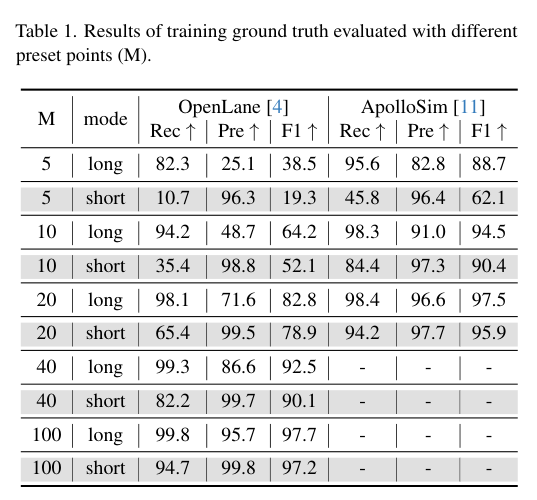
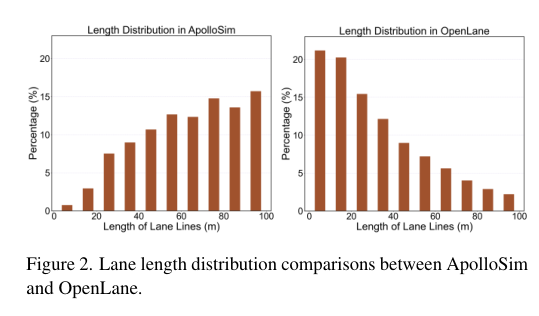
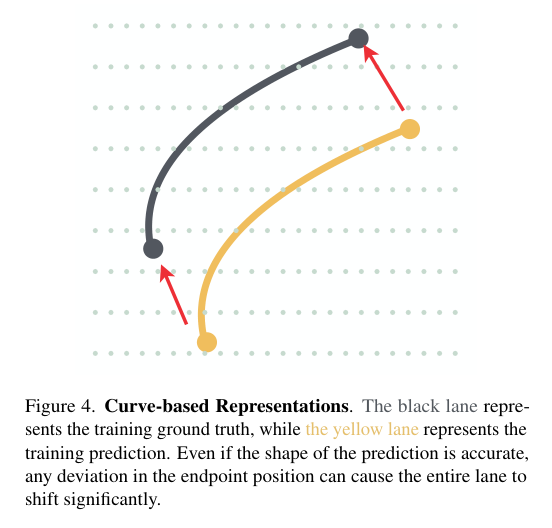
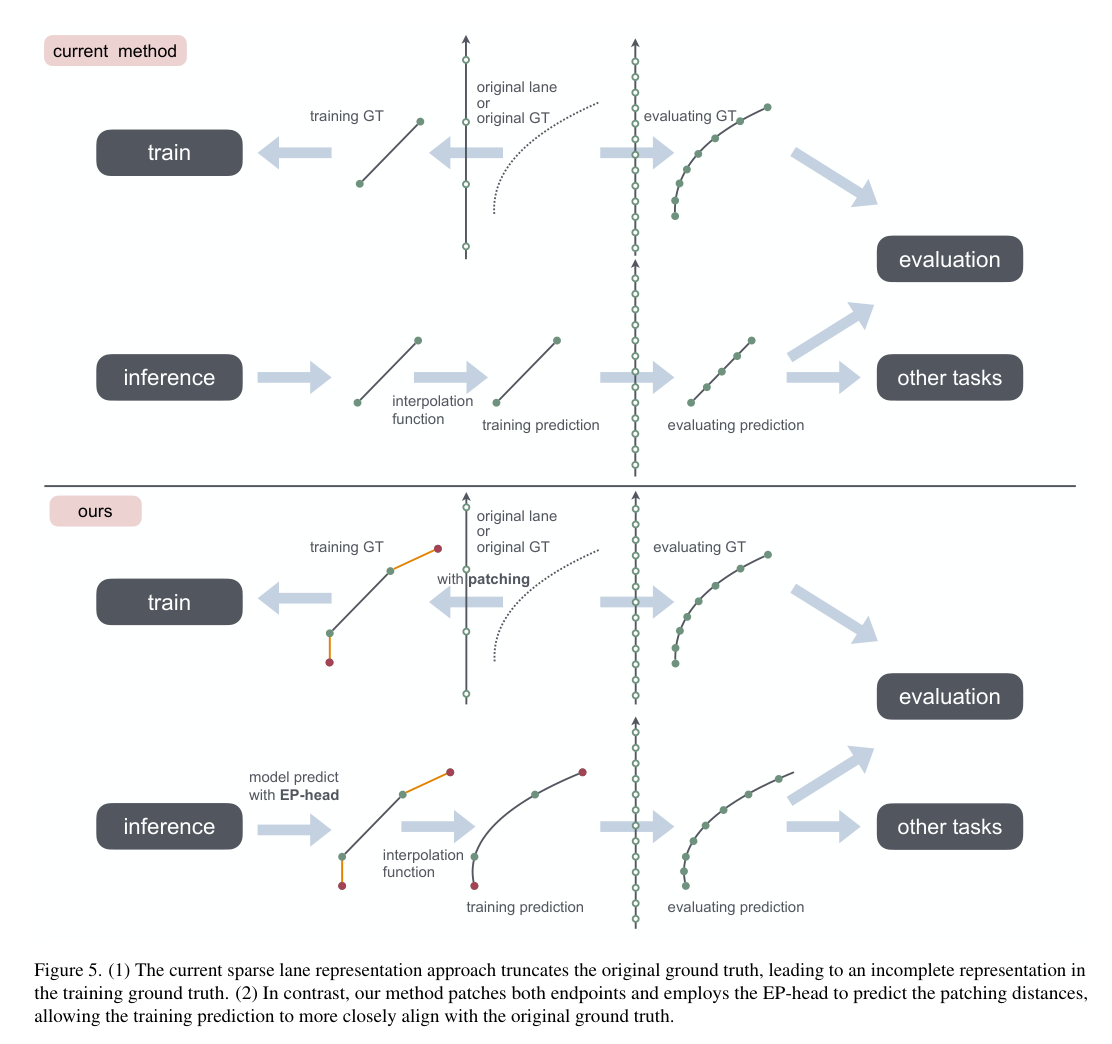
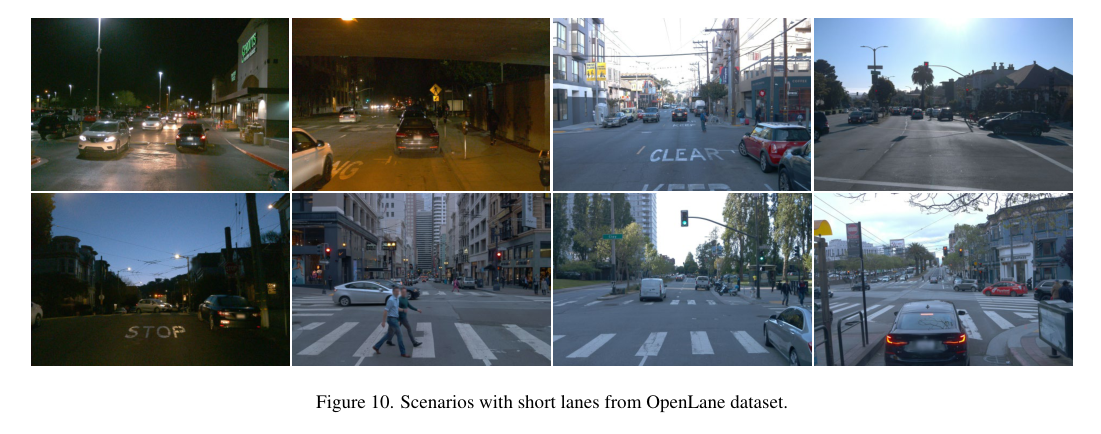
3)背景:单目3D车道检测是自动驾驶中的基础任务,尽管稀疏点方法在复杂车道几何中降低了计算负担并保持了较高的精度,但现有方法未能充分利用车道的几何结构,导致其在车道几何表示和模型设计上存在不足。实验表明,当前的稀疏车道表示方法存在固有缺陷,可能导致多达20米的潜在误差,这在驾驶过程中可能带来严重的安全隐患。
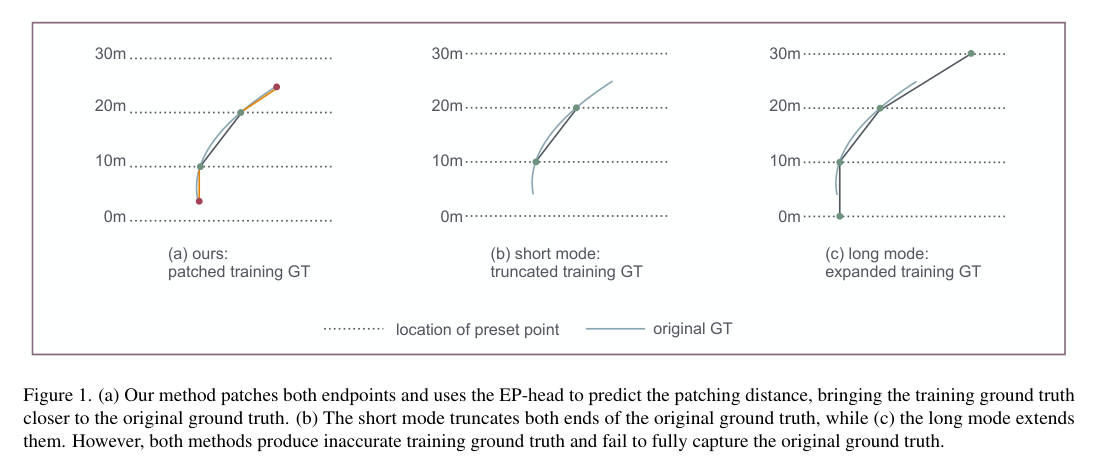
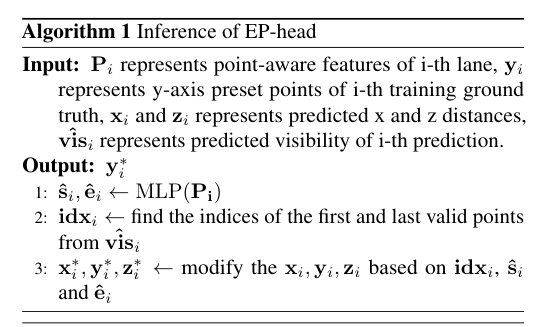
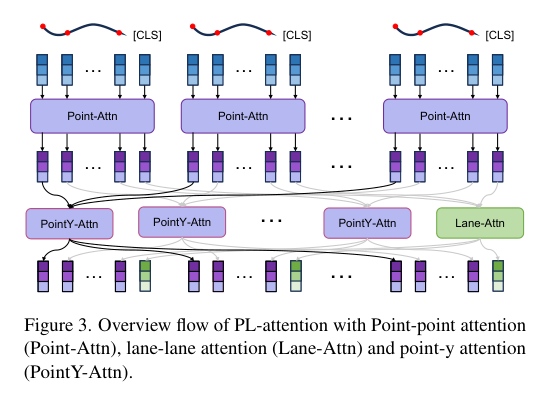
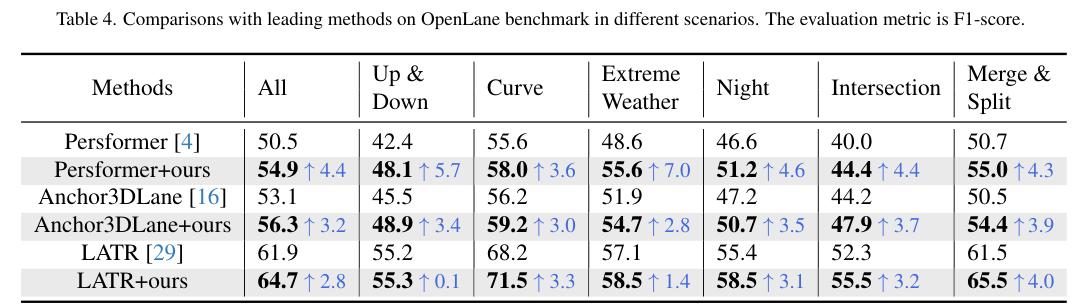
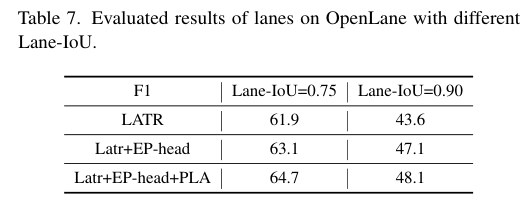
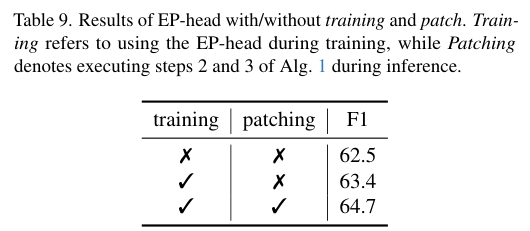
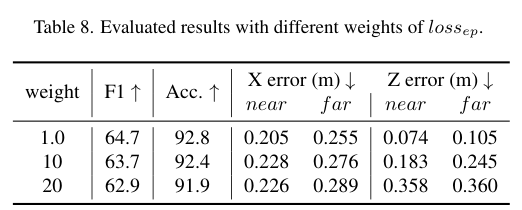
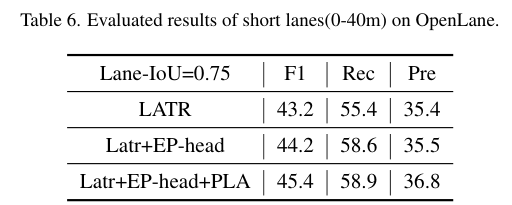
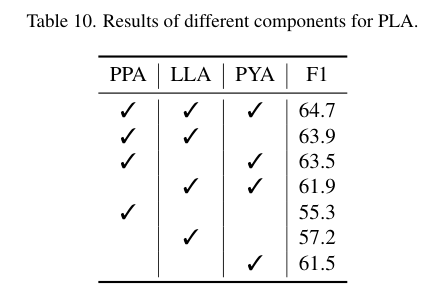
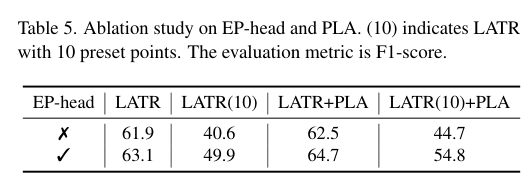
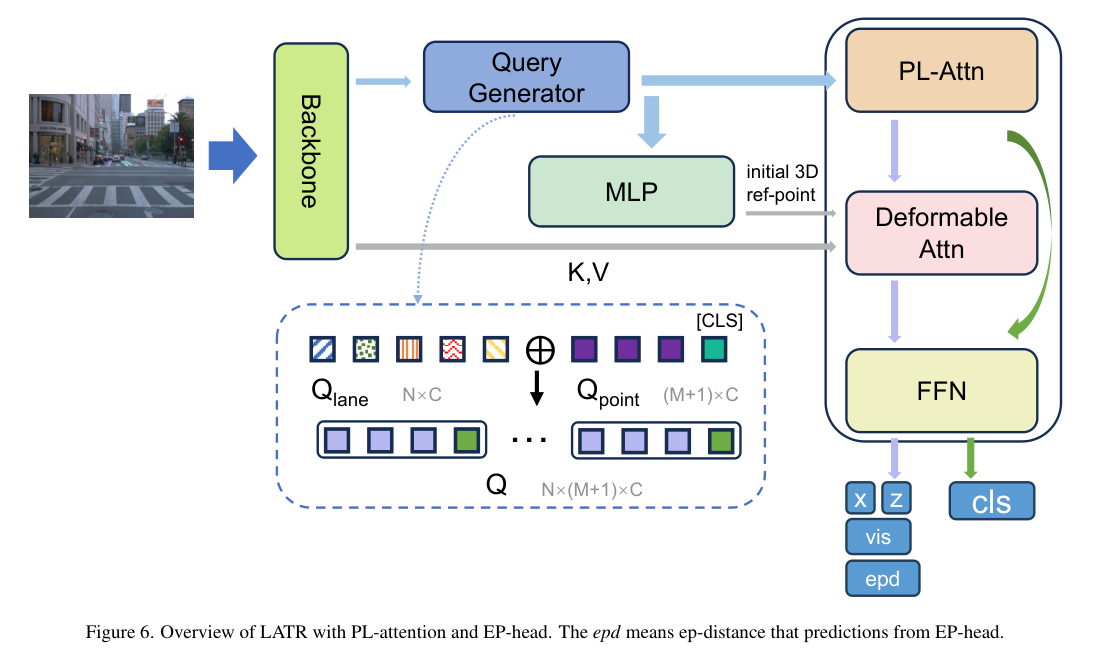
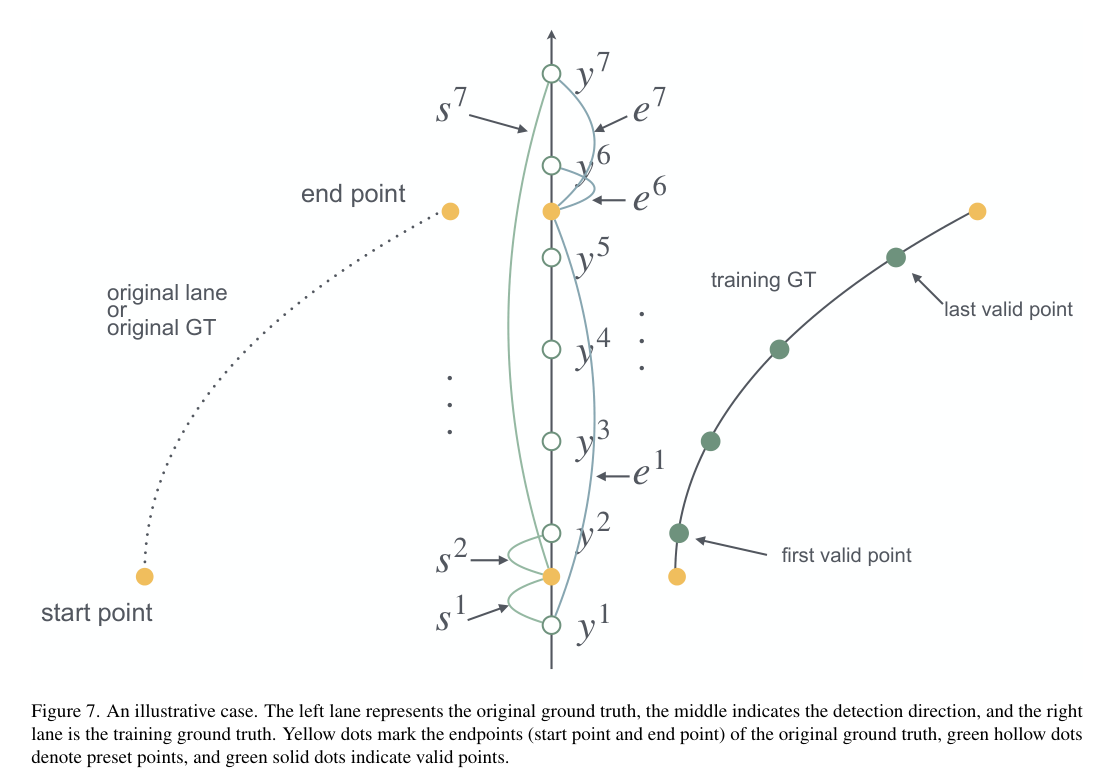
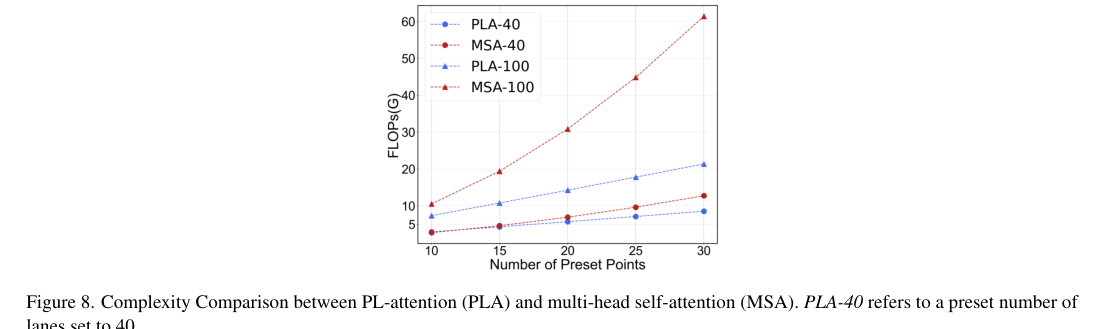
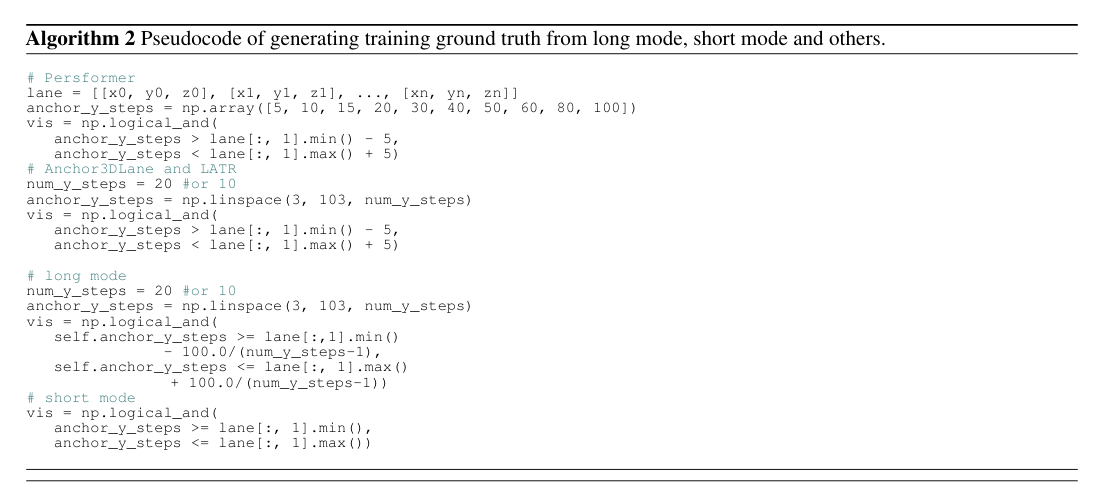
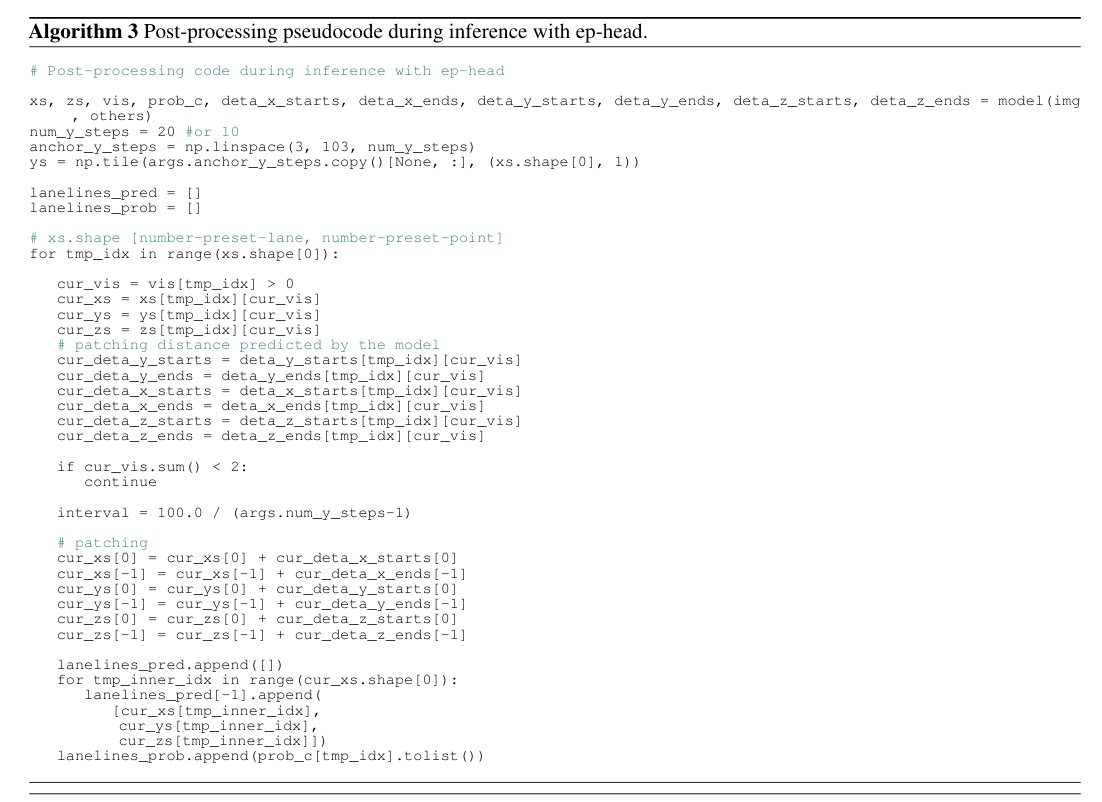
4)方法:为了克服这些问题,提出一种新的车道全结构表示方法——拼接策略,能够完整地表示车道结构。同时,为了让现有模型适应这一策略,提出了EndPoint head(EP-head),通过在端点添加拼接距离,使得模型即使在预设点较少的情况下,也能预测出更完整的车道表示,解决了现有方法的局限性。此外,研究还提出了PointLane注意力机制(PL-attention),将先验几何知识融入到注意力机制中,以增强模型对车道结构的感知。
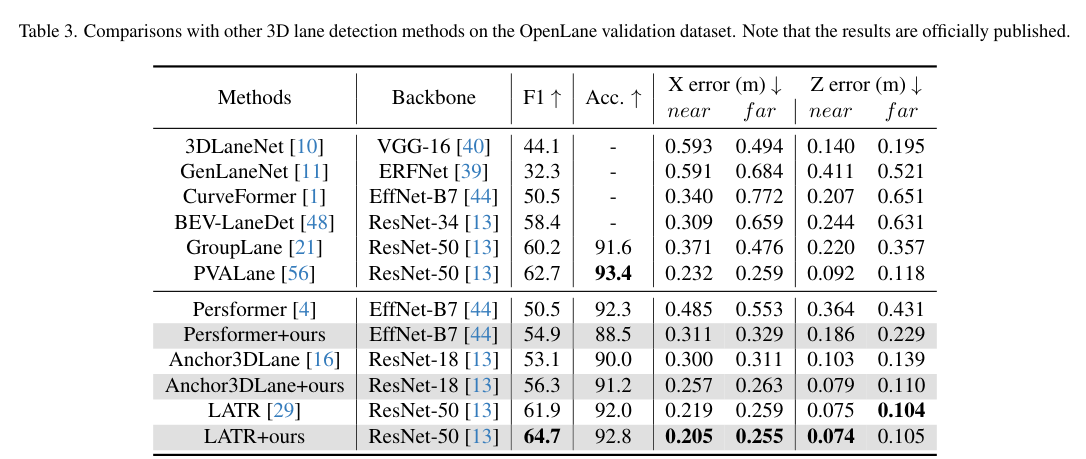
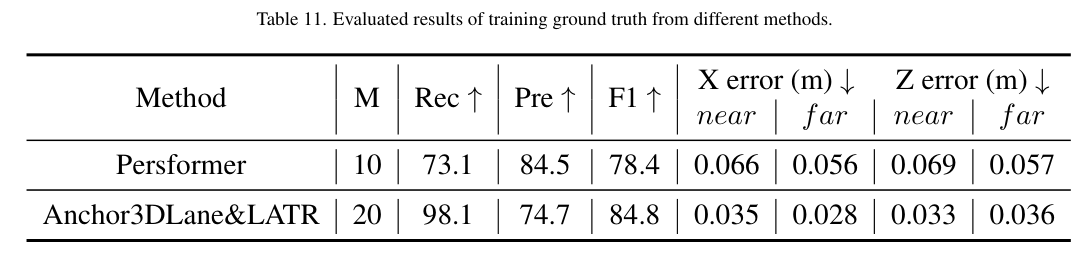
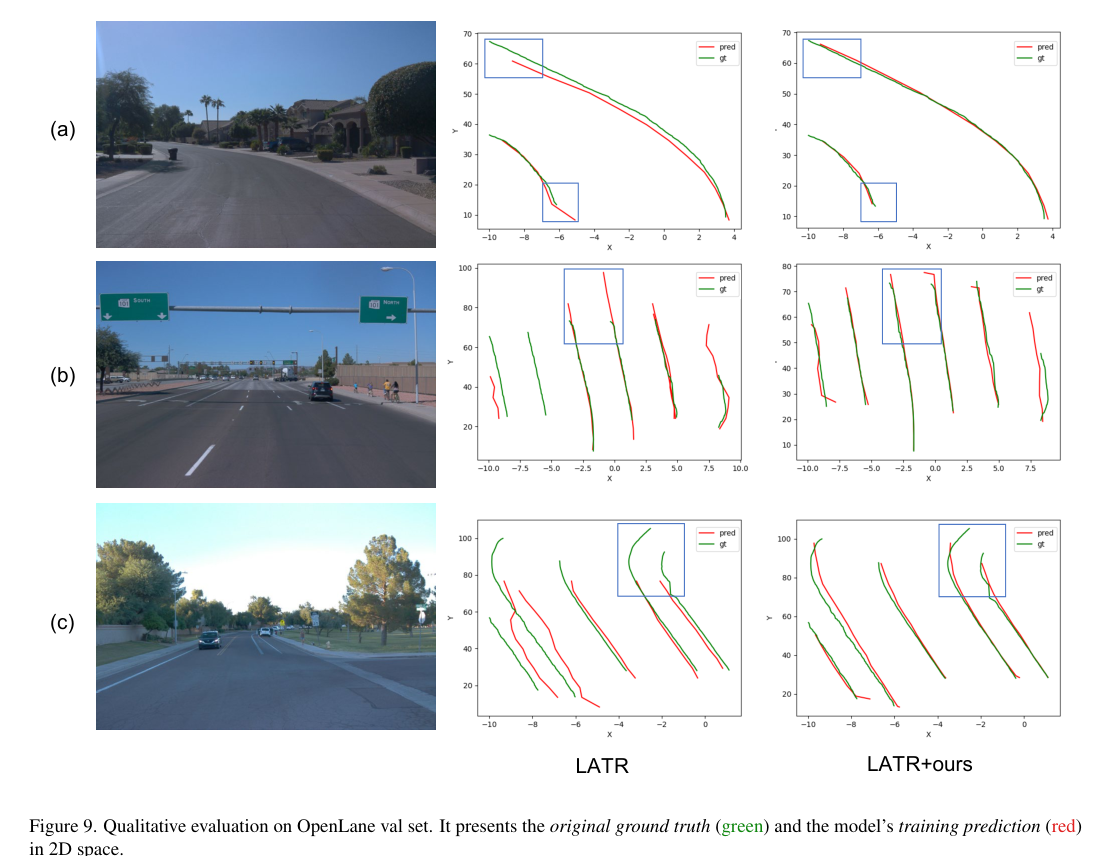
5)结果:大量实验表明,所提出的方法在多个最先进的模型上均有效提高了性能。例如,在总体F1分数上,Persformer提高了4.4分,Anchor3DLane提高了3.2分,LATR提高了2.8分。代码将很快公开。




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











