




摘要:
随着智能科技的不断发展,智能自动巡逻平衡车在众多领域展现出巨大的应用潜力。
本文基于富芮坤 FR3068x-C 芯片设计了一款智能自动巡逻平衡车,采用 FreeRTOS 系统实现多线程任务管理,搭载语音对话功能,可实现唱歌、讲笑话、唤醒控制灯、控制行走、转弯、巡逻模式等丰富功能。通过超声波模块实时检测前方障碍物,实现自动避障;利用 I2C 接口实时采集温湿度数据,结合 ADC 接口采集可燃气体信息,将环境监测与安全防护紧密结合。通过 UART1 和 UART2 分别与语音模块及驱动控制芯片通讯,实时获取车况信息并精准控制车辆行动。借助 LVGL 图形库独立线程设计仪表盘,直观显示车况与环境数据。利用蓝牙上网功能,结合 lwip 网络协议栈与 TCP 协议,对接巴法云实时上传车况及控制信息,实现远程监控。本设计旨在打造一款功能强大、性能稳定、易于扩展的智能自动巡逻平衡车,为智能化设备在安防、物流、服务等领域的应用提供有力支持。
视频演示:
巡逻-云端查看数据:https://www.bilibili.com/video/BV1KpAVejEWR/
语音控制行走-巡逻-唱歌:https://www.bilibili.com/video/BV1NpAVejEbT/
巡逻模式自动调整姿势:https://www.bilibili.com/video/BV1xpAVejERa/
语音唤醒后开关灯控制:https://www.bilibili.com/video/BV1KpAVejEAM/
目录
1 引言
1.1 研究背景
在当今快速发展的智能时代,人们对智能化设备的需求日益增长。另外无论实验室、厂房、无人办公室等家里环境下都存在一定的安全问题,在没人的时候安全问题已显得尤为重要。
而自动巡逻平衡车作为一种兼具移动性和智能性的设备,可广泛应用于安防监控、物流配送、服务行业等领域。其不仅能够减轻工作人员的负担,还可以提高工作效率和准确性。
此外,通过云平台接入,可从手机端或者办公室电脑实时监控到未知信息

1.2 研究目的
本文旨在设计一款基于富芮坤 FR3068x-C 芯片的智能自动巡逻平衡车,实现多种功能,包括语音交互、自动避障、环境监测、车况信息显示以及远程监控等。通过系统化的设计和优化,使其具备高性能、高可靠性、易用性以及良好的扩展性,满足不同场景下的应用需求。
1.3 研究方法与内容
本研究采用模块化设计方法,将系统划分为硬件和软件两大部分。硬件部分主要涉及主控芯片、语音模块、避障模块、传感器、驱动芯片、显示屏、蓝牙模块以及电源管理模块等。软件部分则基于 FreeRTOS 系统,通过创建独立线程实现多任务并发运行,包括语音对话、车况采集与控制、环境数据采集、仪表盘显示和蓝牙通信与云对接等功能。通过合理的设计和反复的测试,确保系统的性能和稳定性。
2 系统功能概述
2.1 基础移动功能
平衡车能够实现基本的前进、后退、左转、右转等移动动作。用户可以通过语音指令或者手动操作来进行控制。在巡逻模式下,平衡车按照预设的路线自动行驶,无需人工干预。
如前面附上视频演示
2.2 语音交互功能
具备强大的语音对话功能,包括唱歌、讲笑话等娱乐功能,为用户提供轻松愉快的互动体验。同时,用户可以通过语音唤醒控制灯,打开或关闭车上的灯,方便在不同环境下的使用。此外,语音指令还可以直接控制平衡车的行走、转弯和巡逻模式,使操作更加便捷和智能化。
如前面附上视频演示
2.3 自动避障功能
利用超声波模块实时检测前方障碍物的距离。当距离小于设定的阈值时,平衡车能够自动识别障碍物并执行相应的避障动作,如停止、后退或转向,确保车辆的安全行驶,避免碰撞事故的发生。
如前面附上视频演示
避障使用超声波传感器,用于检测前面障碍

2.4 环境监测功能
通过 I2C 接口实时采集温湿度数据,了解周围环境的温度和湿度情况。同时,利用 ADC 接口采集可燃气体信息数据,对环境中的可燃气体进行监测,及时发现潜在的安全隐患,为安全防护提供重要依据。
传感器安装位置

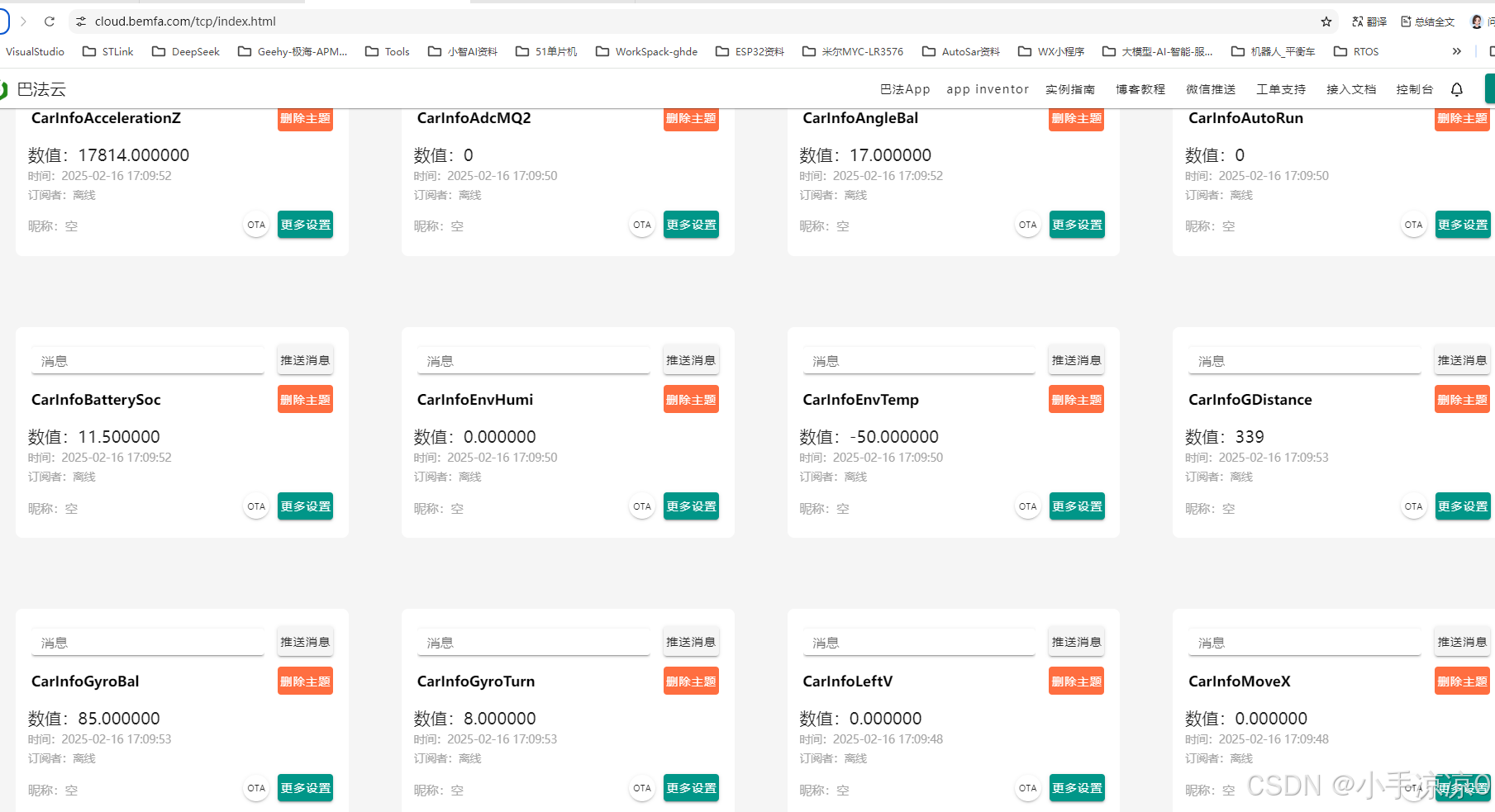
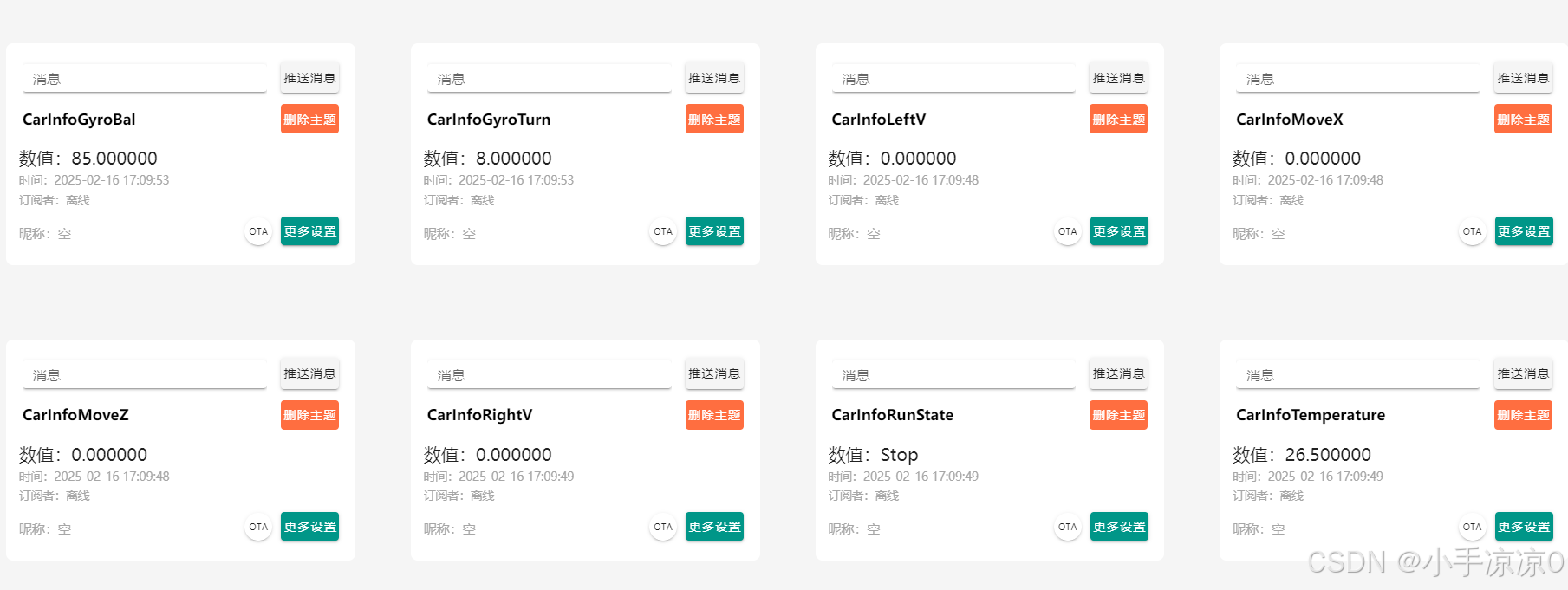
巴法云端效果如下:
2.5 车况信息显示
使用 LVGL 设计的仪表盘实时显示车况信息,包括速度、电量、行驶方向等。通过清晰直观的界面,用户可以随时掌握平衡车的运行状态,便于进行监控和管理。

2.6 远程监控与数据传输
借助蓝牙上网功能,支持 lwip 网络协议栈,使用 TCP 协议与巴法云对接。将车况信息和控制信息实时上传至巴法云,方便后台进行查看和监控。同时,也能够接收来自云端的控制指令,实现远程控制功能。
打开log窗口看到log信息,按我们软件流程如下
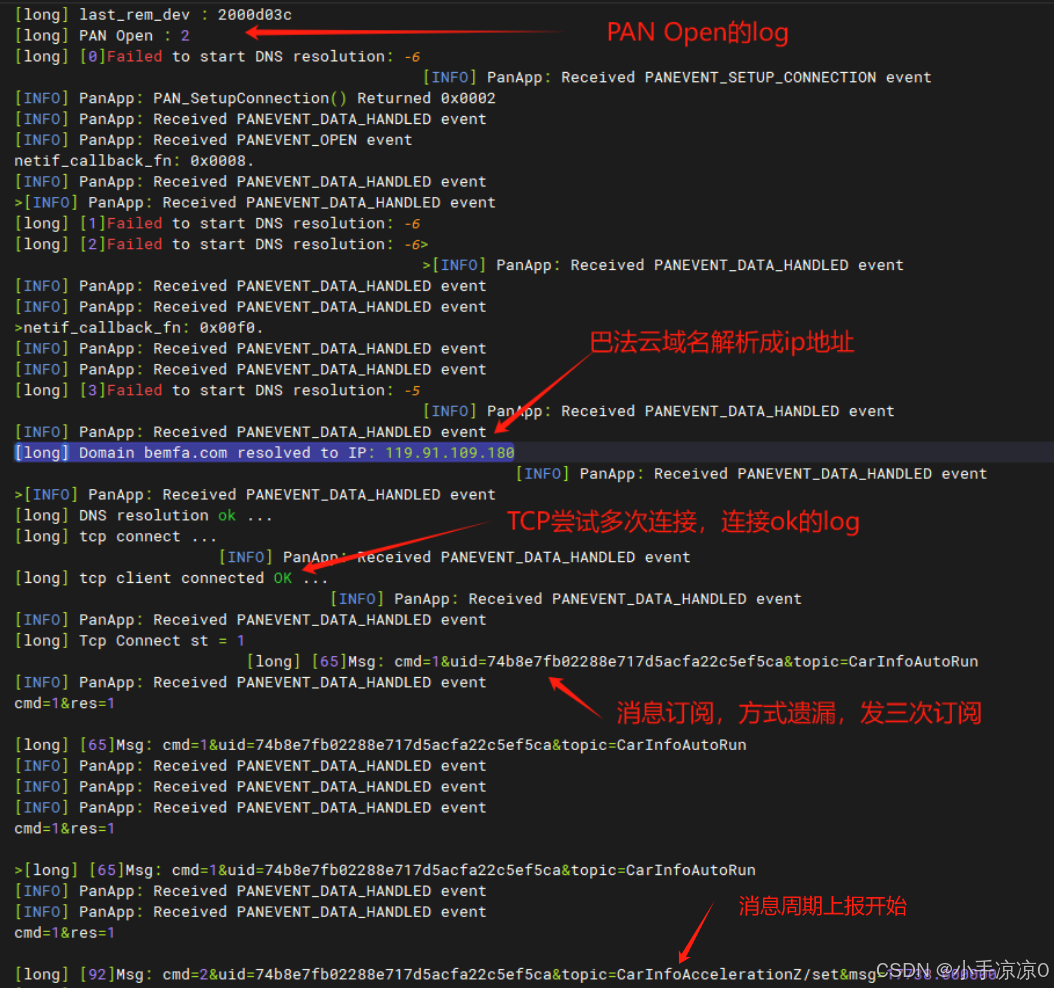
数据周期性上报log明细
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1089
1089

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









