






TIM输入
简介
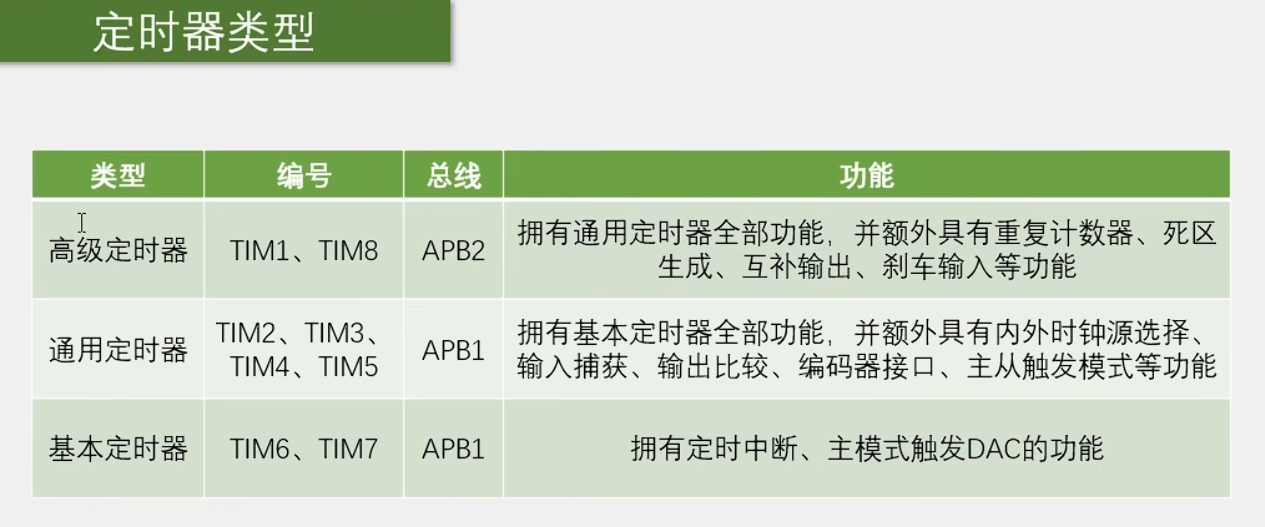 基本定时器
基本定时器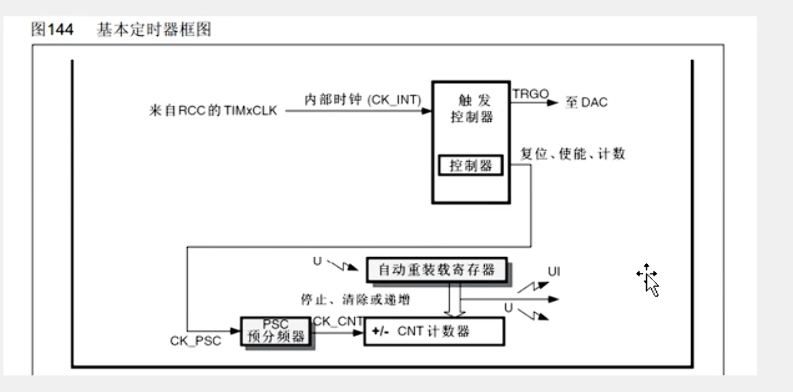
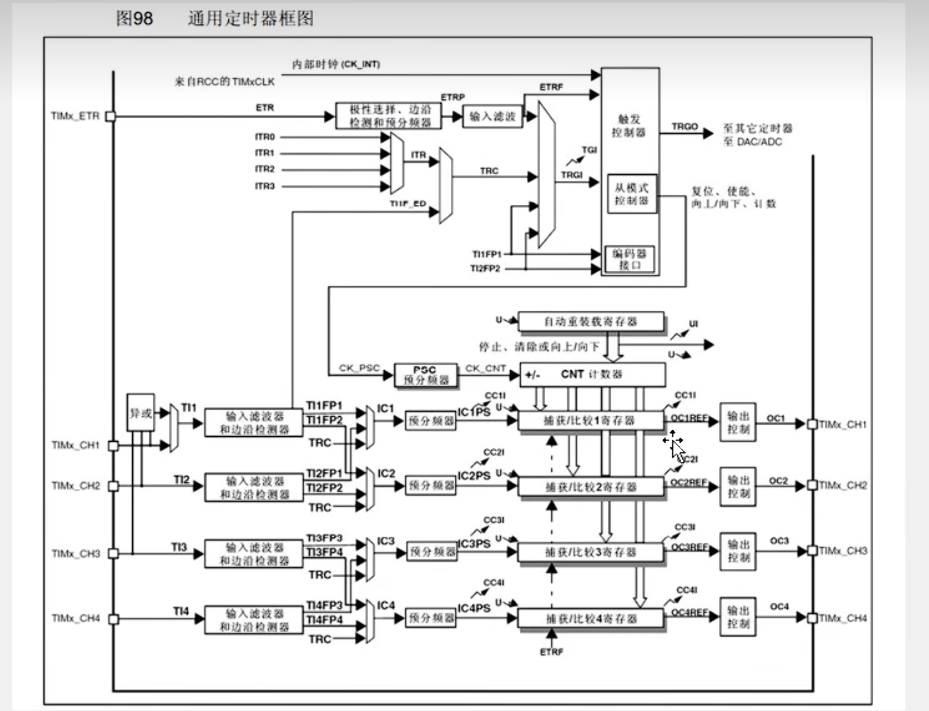
通用定时器
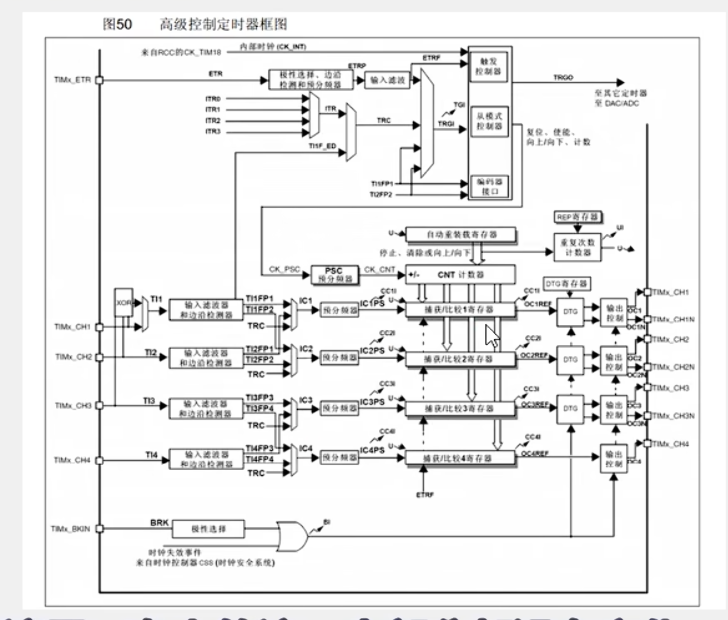
高级定时器
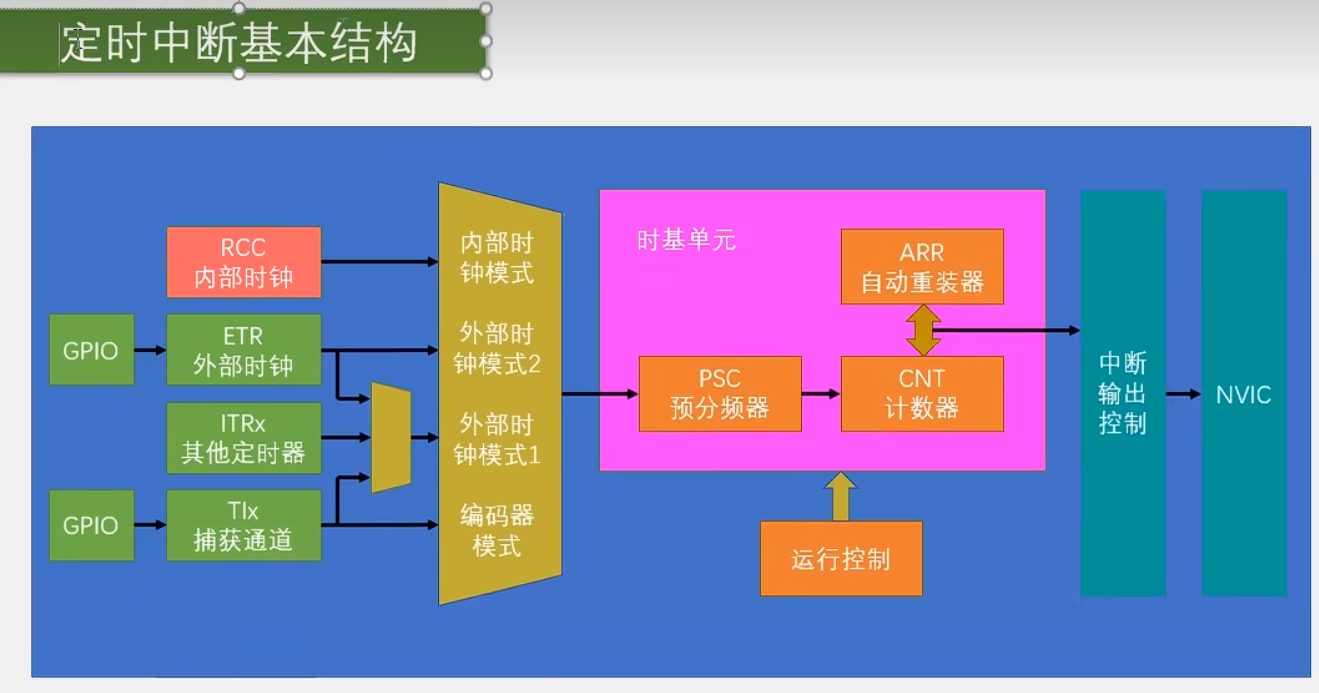
定时中断基本结构
内部定时器计数代码
void timer_init(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);//RCC使能
TIM_InternalClockConfig(TIM2);//选择内部时钟
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up;//向上计数
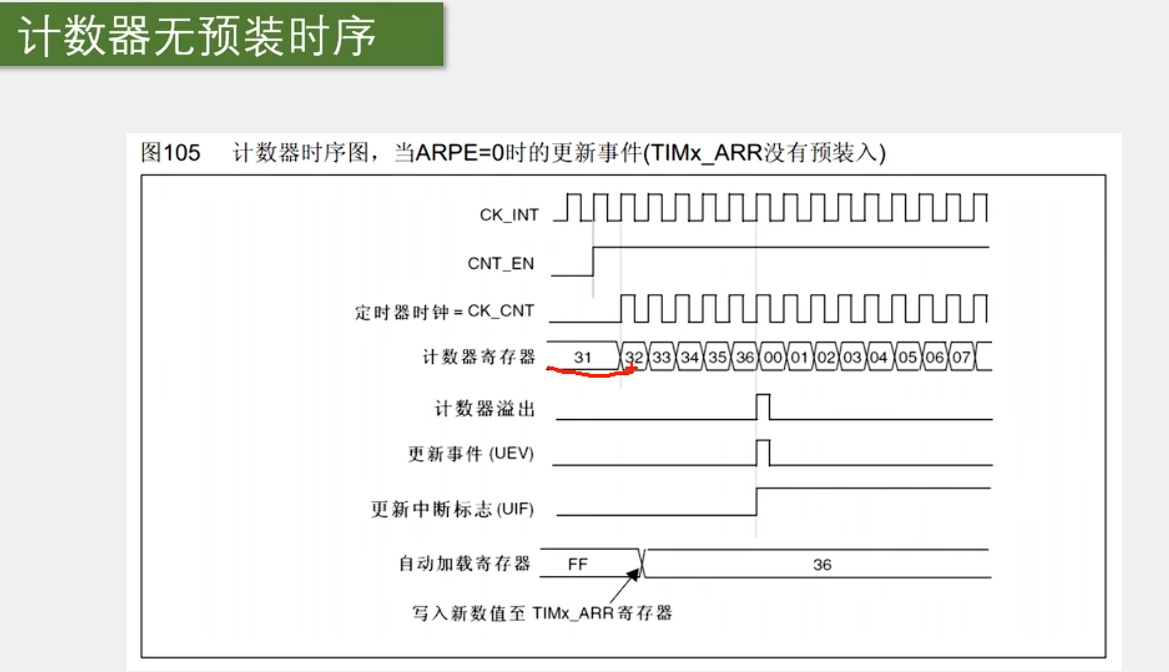
TIM_TimeBaseInitStruct.TIM_Period = 10000 - 1;//计数
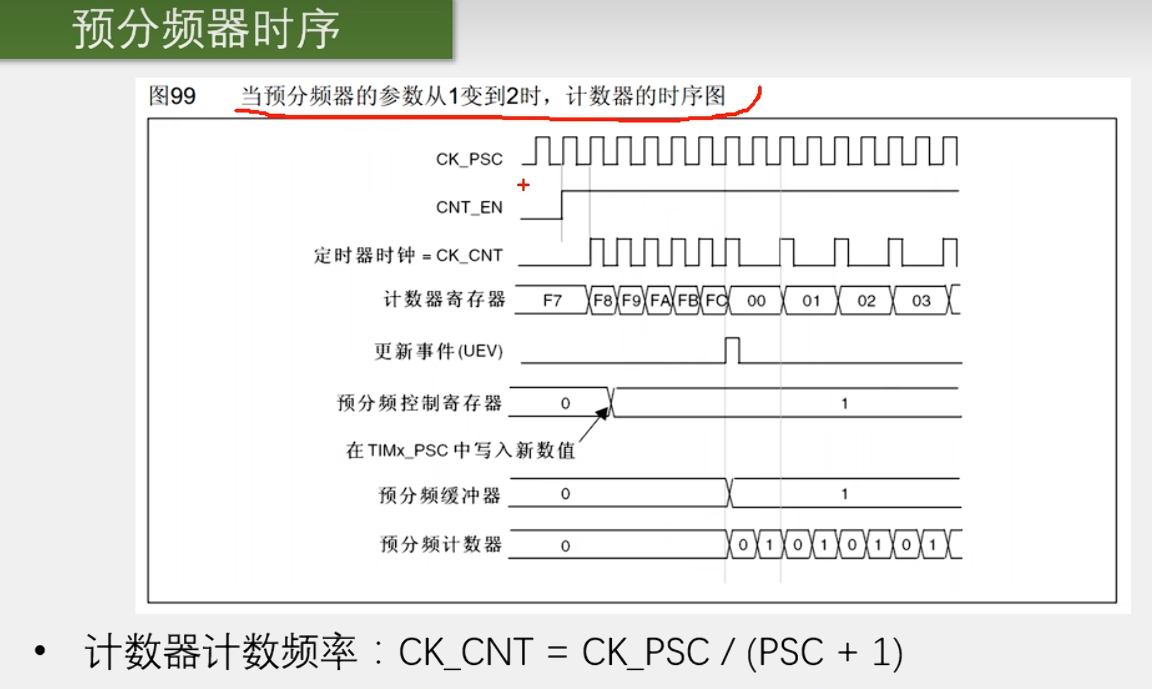
TIM_TimeBaseInitStruct.TIM_Prescaler = 8400 - 1;//预分频
TIM_TimeBaseInitStruct.TIM_RepetitionCounter = 0;//重复计数器,高级定时器才有
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStruct);//时基单元初始化
TIM_ClearFlag(TIM2, TIM_FLAG_Update);//防止定时器一使能就触发中断
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);//中断使能
NVIC_InitTypeDef NVIC_InitStruct;
NVIC_InitStruct.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 2;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStruct);//NVIC初始化
TIM_Cmd(TIM2, ENABLE);//使能定时器
}
static int timer2_count = 0;
void TIM2_IRQHandler(void)
{
if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET)
{
printf("timer2_count = %d\r\n", timer2_count++);
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
}
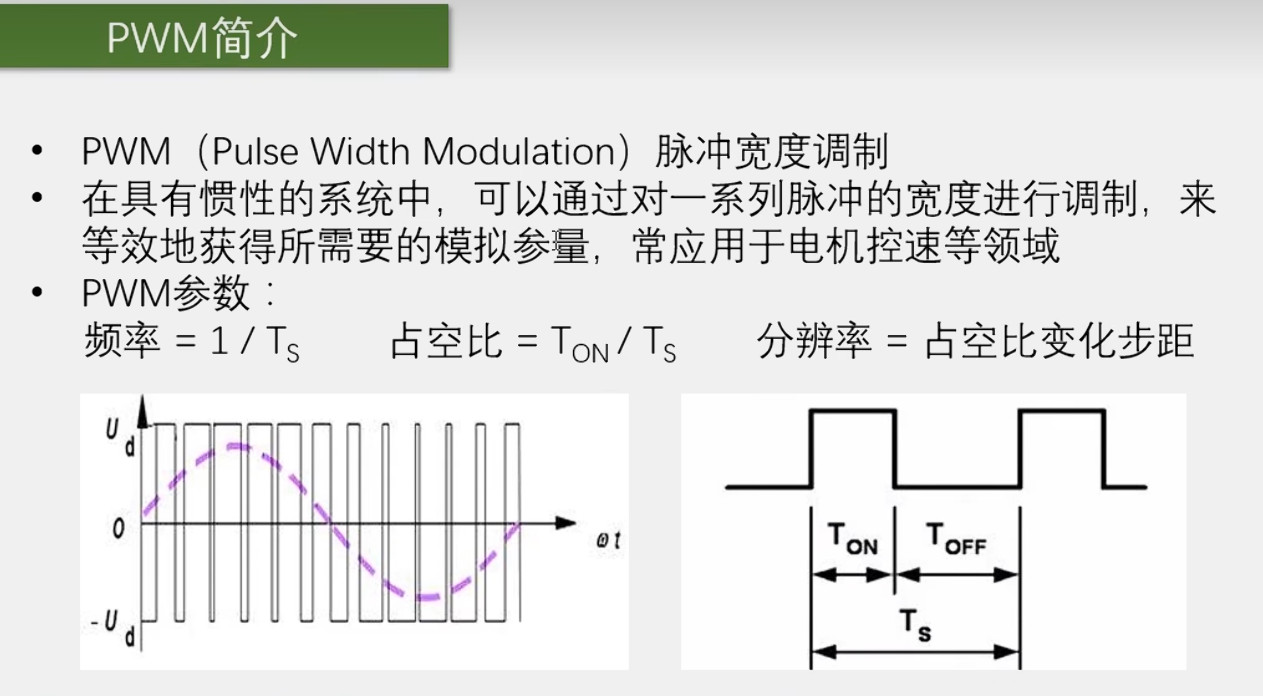
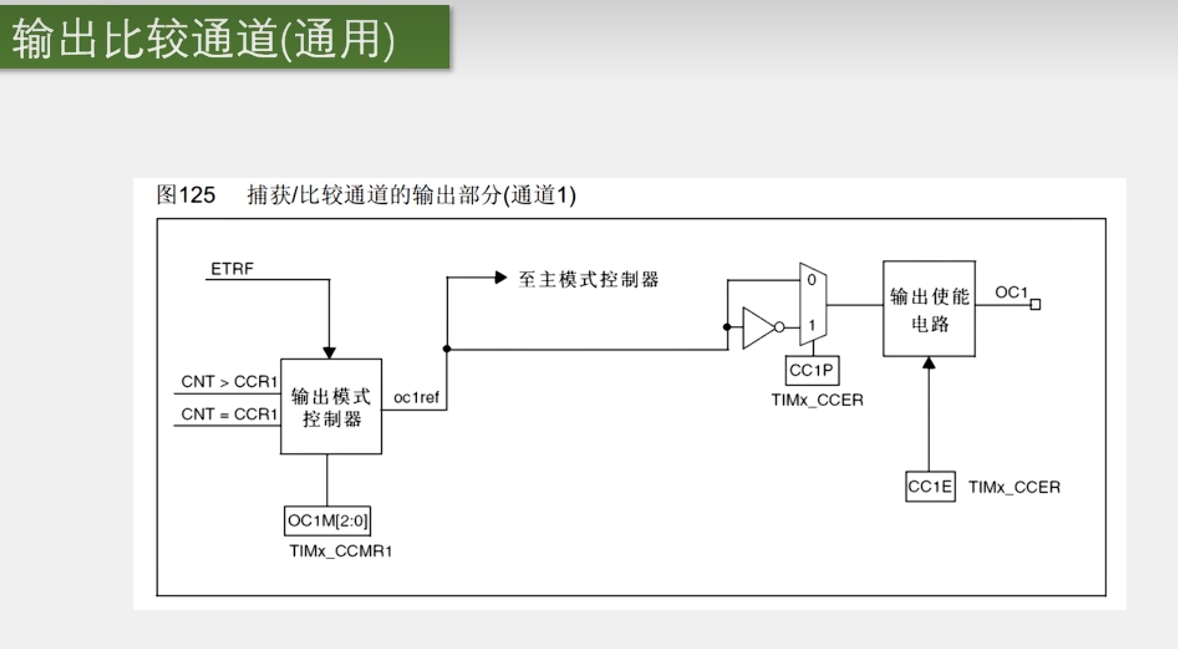
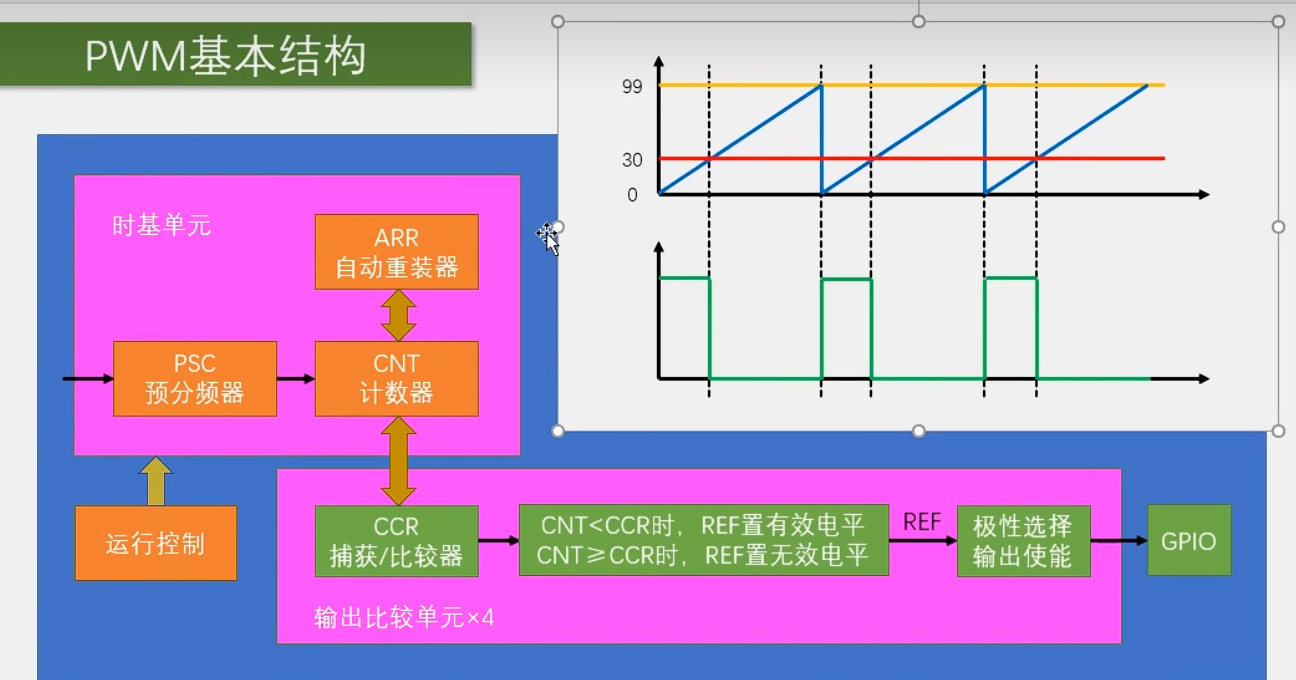
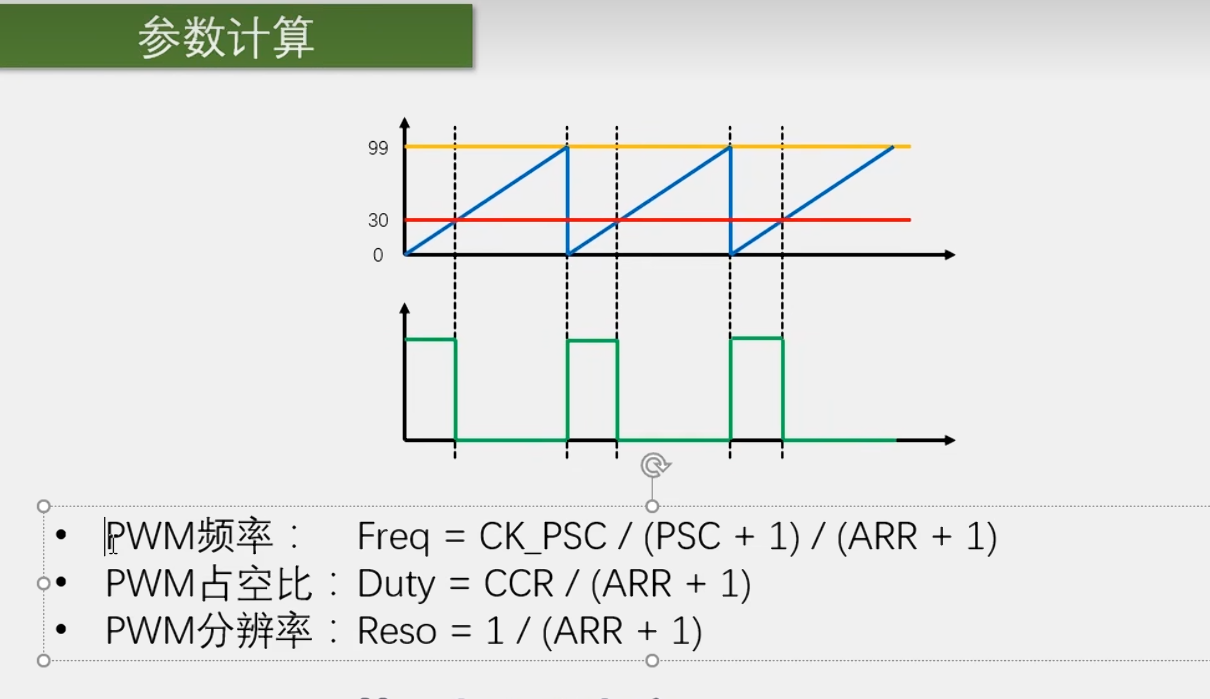
}TIM输出(PWM)


















 2735
2735

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









