



一,分析代码运行时间
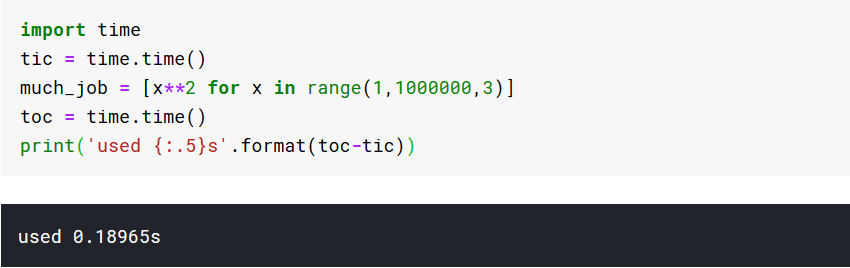
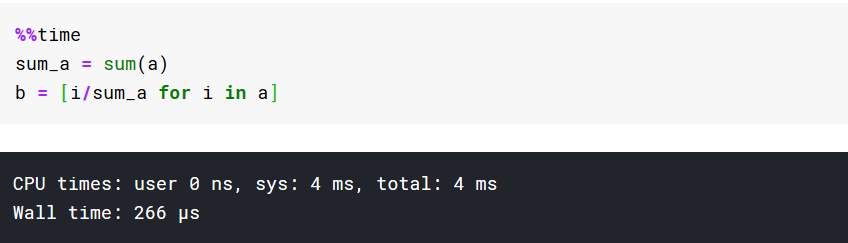
第1式,测算代码运行时间
平凡方法
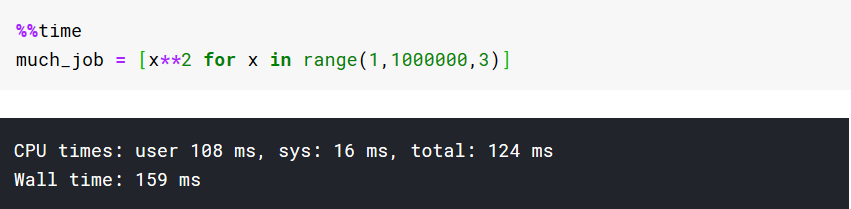
快捷方法(jupyter环境)
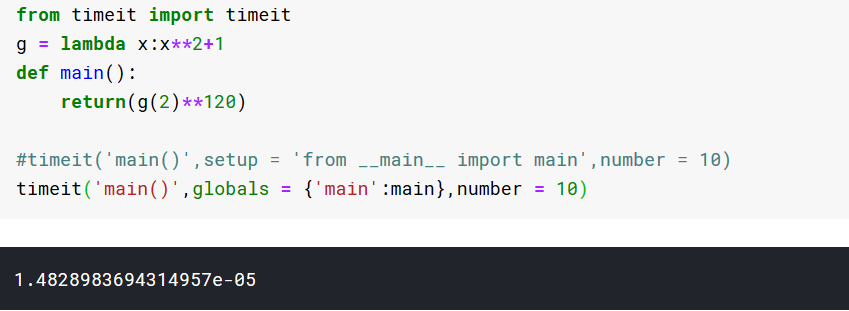
第2式,测算代码多次运行平均
时间
平凡方法
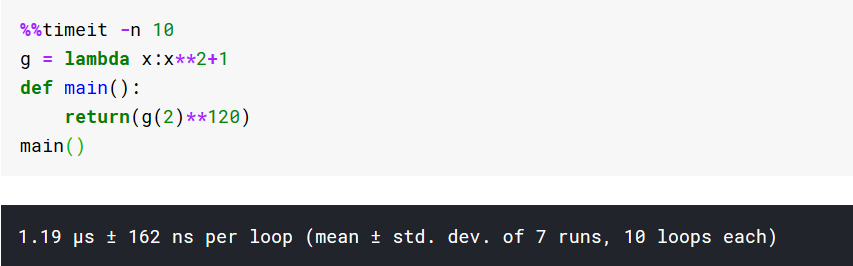
快捷方法(jupyter环境)
如果你依然在编程的世界里迷茫,可以加入我们的Python学习扣qun:784758214,看看前辈们是如何学习的。交流经验。从基础的python脚本到web开发、爬虫、django、数据挖掘等,零基础到项目实战的资料都有整理。送给每一位python的小伙伴!分享一些学习的方法和需要注意的小细节,点击加入我们的 python学习者聚集地
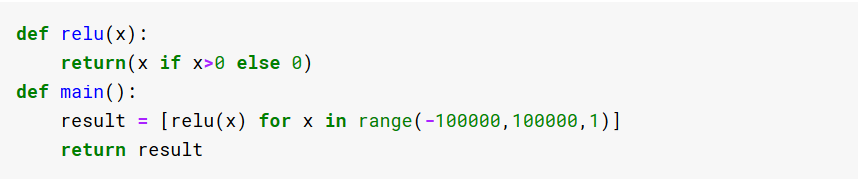
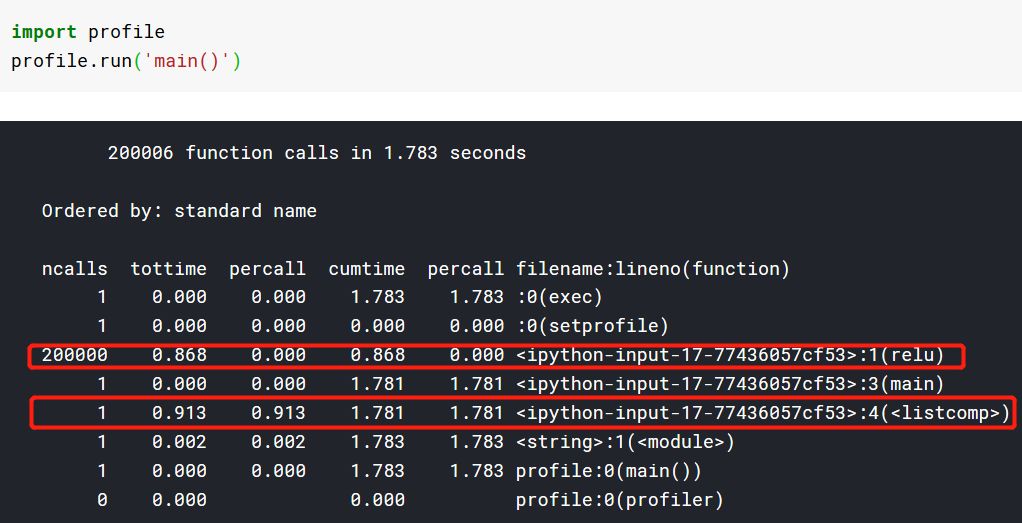
第3式,按调用函数分析代码运行时间
平凡方法
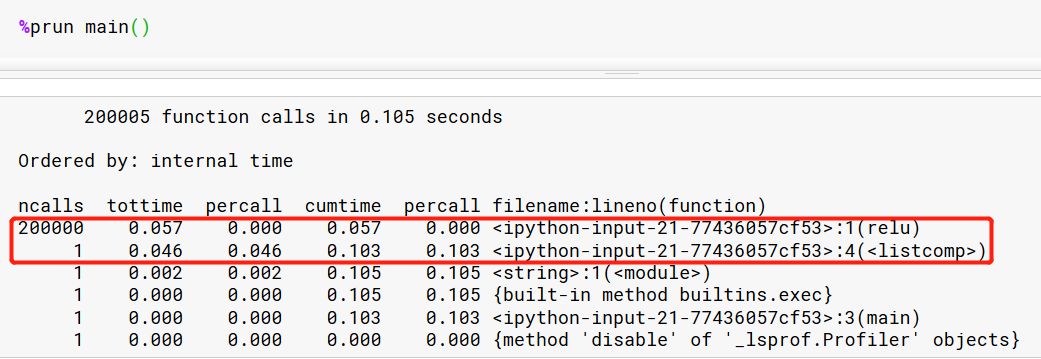
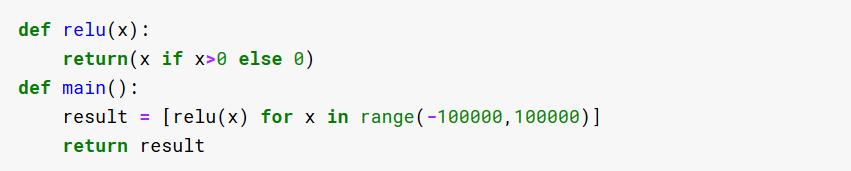
快捷方法(jupyter环境)
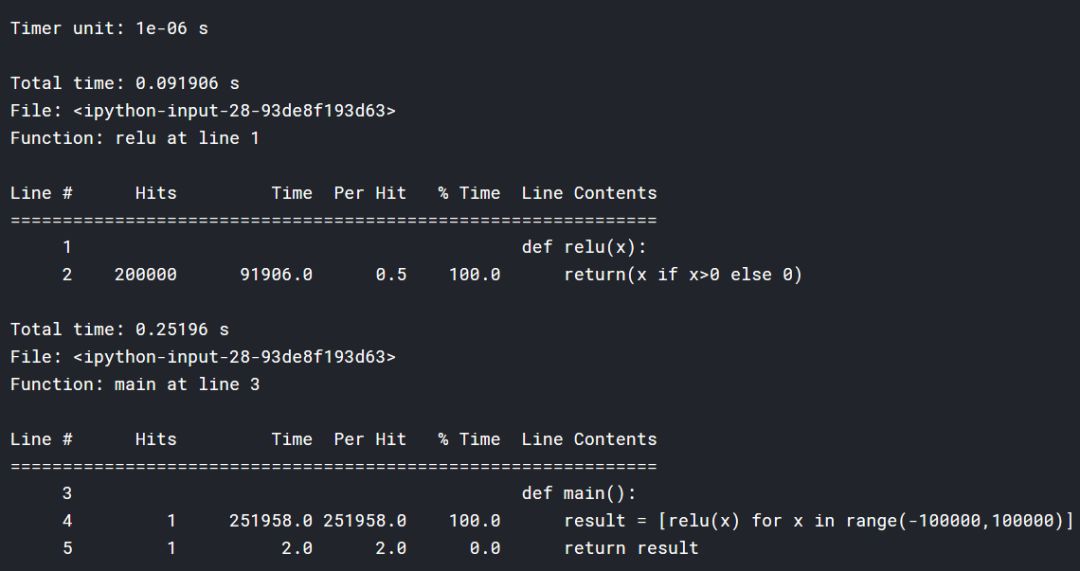
第4式,按行分析代码运行时间
平凡方法


快捷方法(jupyter环境)

二,加速你的查找
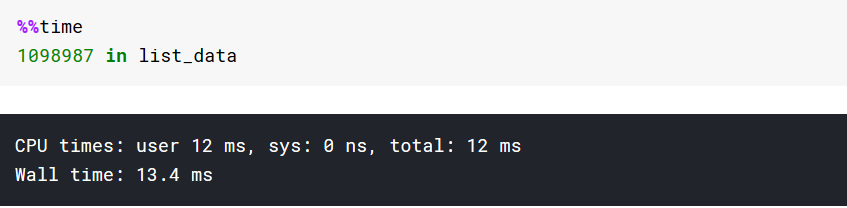
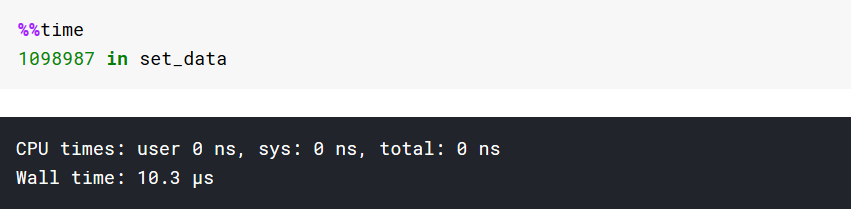
第5式,用set而非list进行查找
低速方法

高速方法
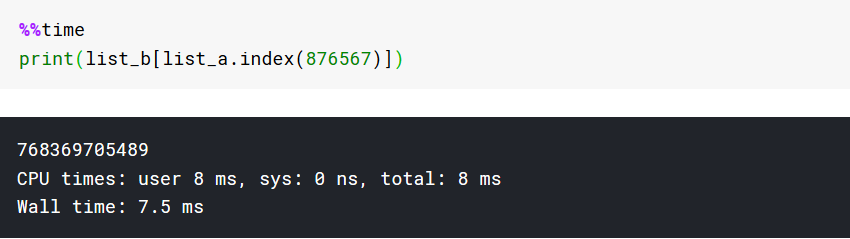
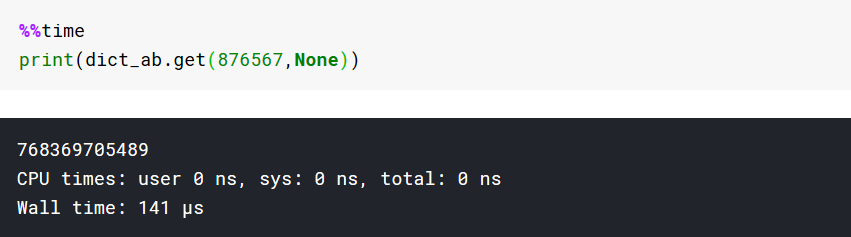
第6式,用dict而非两个list进行匹配查找
低速方法

高速方法
三,加速你的循环
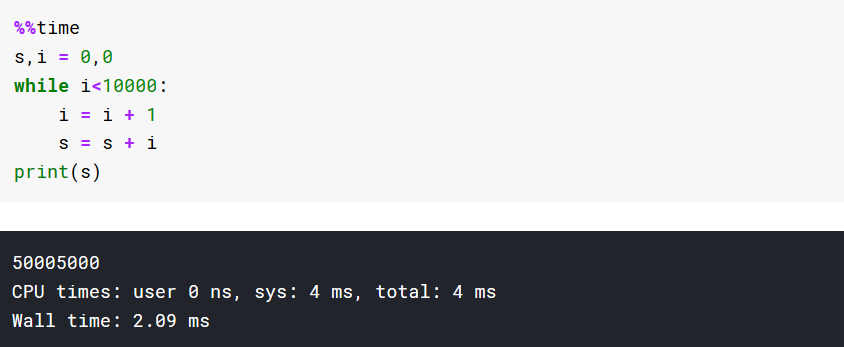
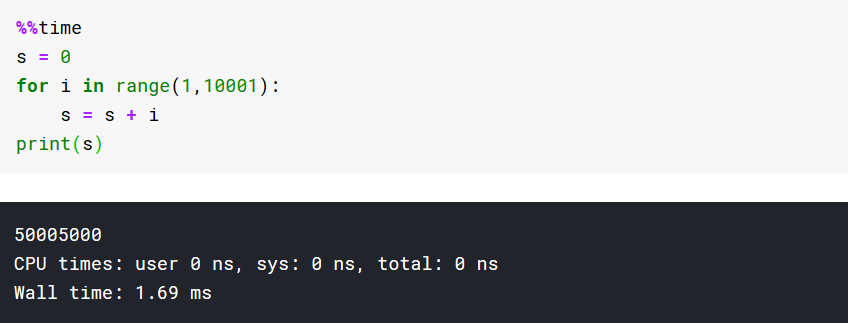
第7式,优先使用for循环而不是while循环
低速方法
高速方法
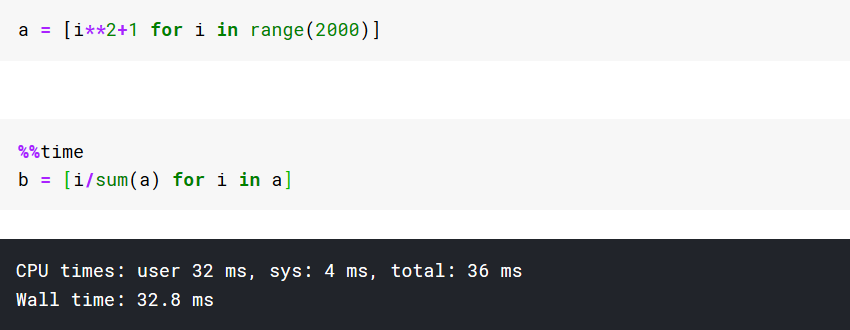
第8式,在循环体中避免重复计算
低速方法
高速方法
四,加速你的函数
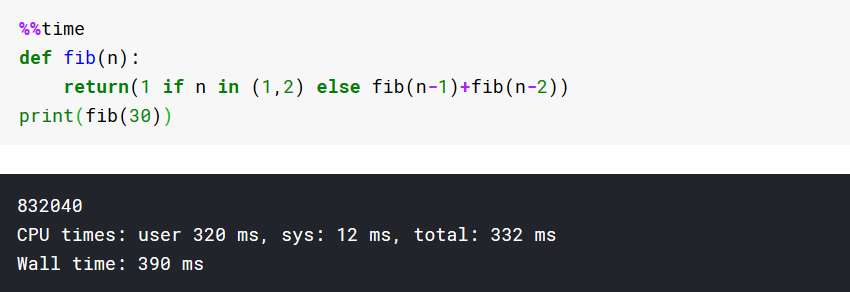
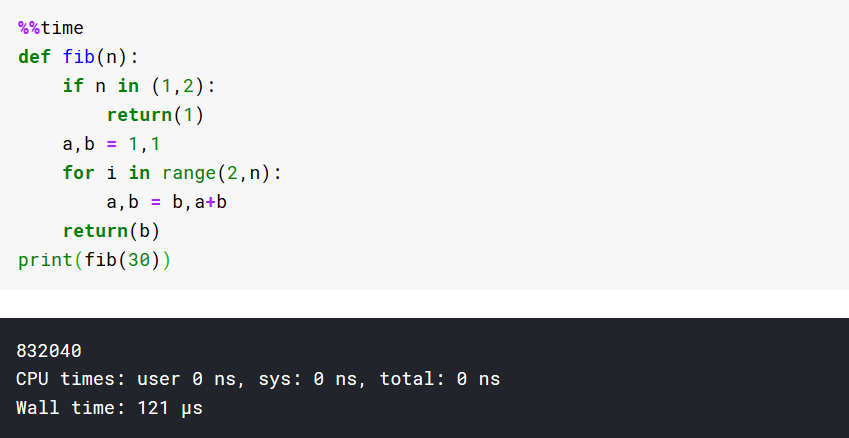
第9式,用循环机制代替递归函数
低速方法
高速方法
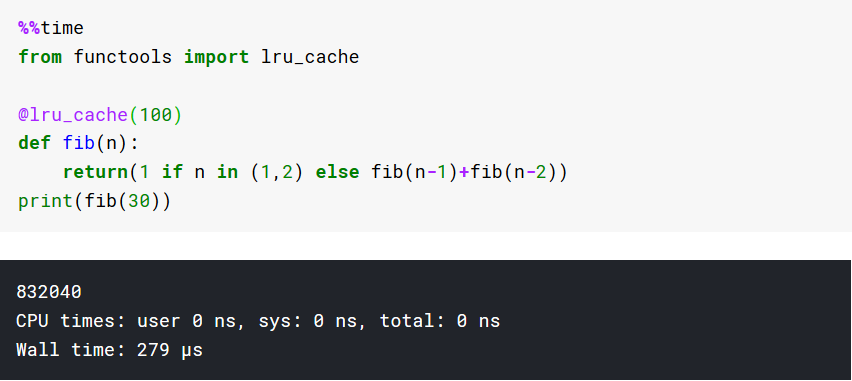
第10式,用缓存机制加速递归函数
低速方法

高速方法
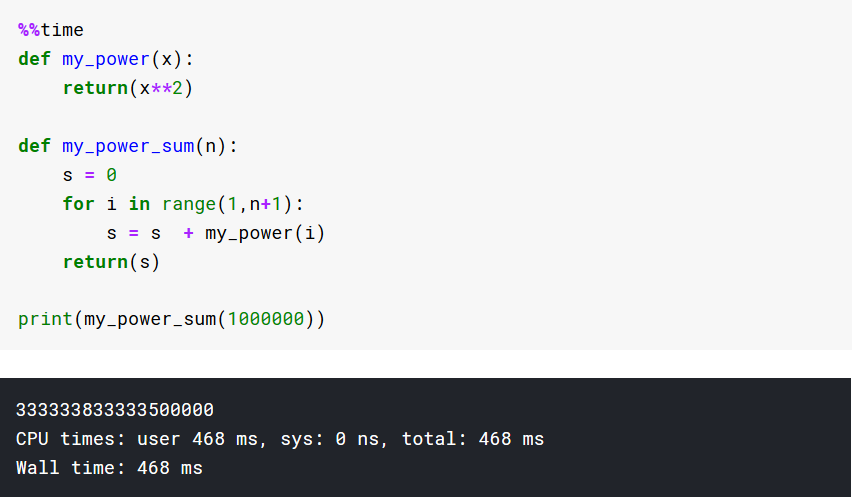
第11式,用numba加速Python函数
低速方法
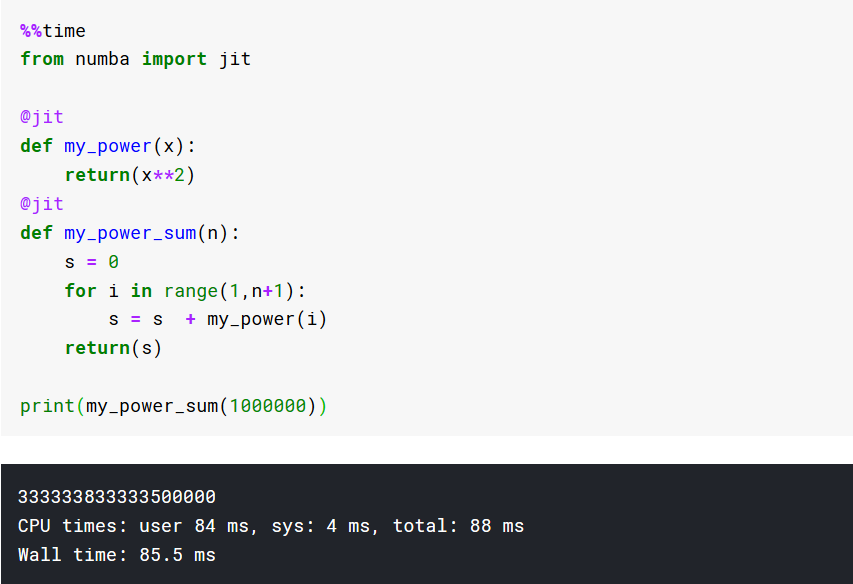
高速方法
五,使用标准库函数进行加速
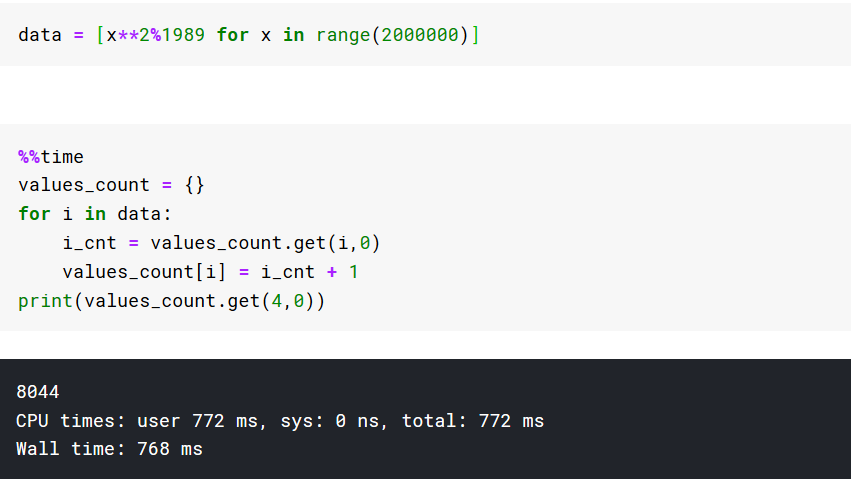
第12式,使用collections.Counter加速计数
低速方法
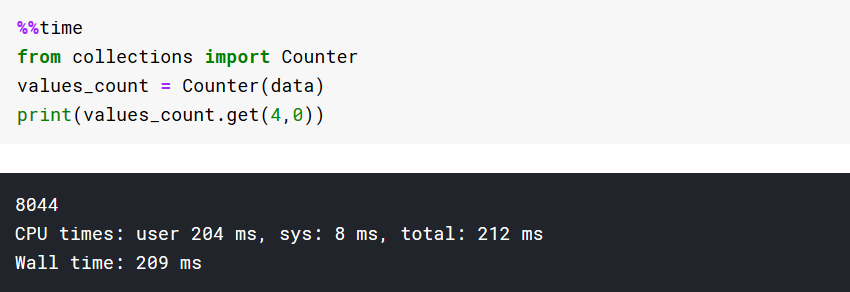
高速方法
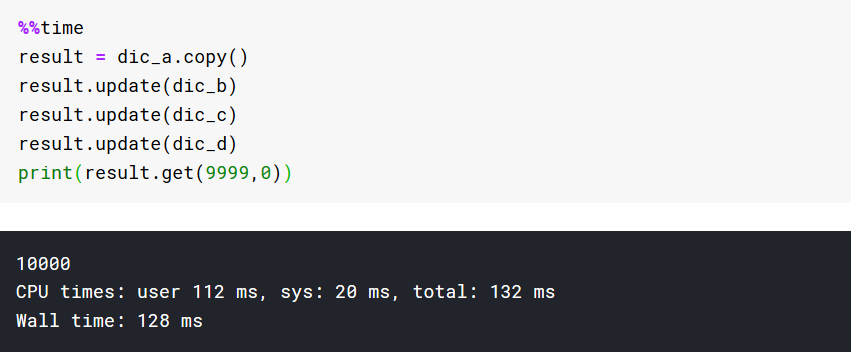
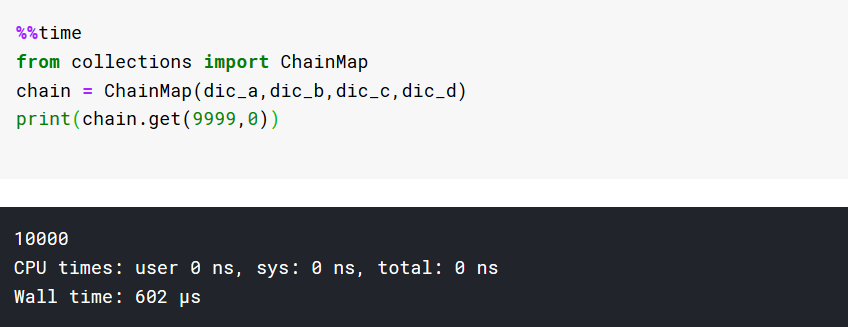
第13式,使用collections.ChainMap加速字典合并
低速方法

高速方法
六,使用高阶函数进行加速
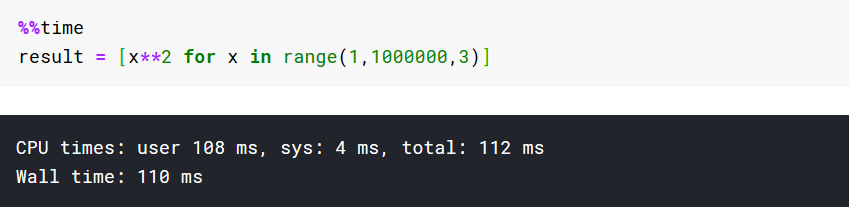
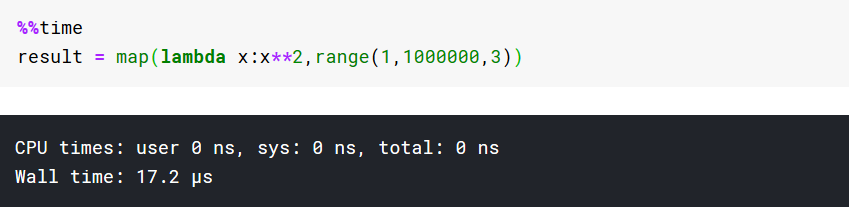
第14式,使用map代替推导式进行加速
低速方法
高速方法
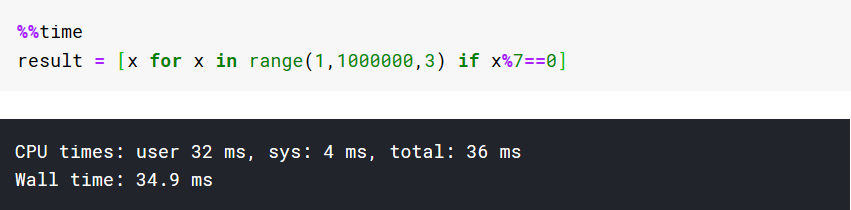
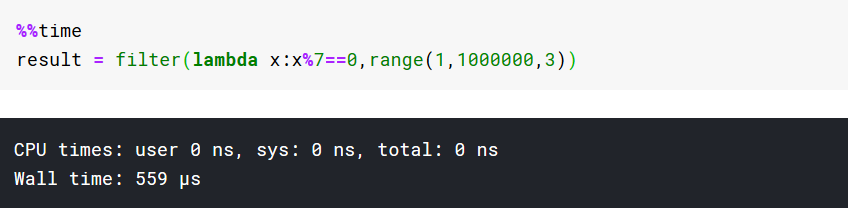
第15式,使用filter代替推导式进行加速
低速方法
高速方法
七,使用numpy向量化进行加速
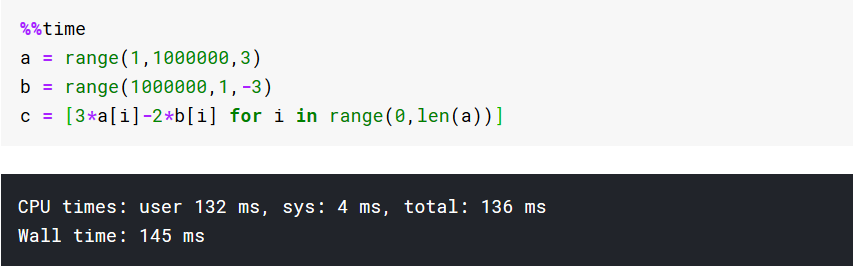
第16式,使用np.array代替list
低速方法
高速方法

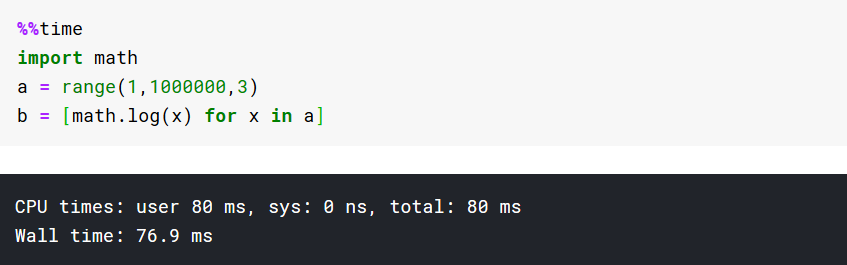
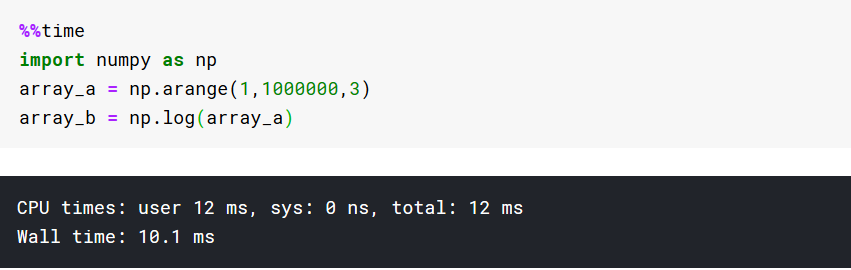
第17式,使用np.ufunc代替math.func
低速方法
高速方法
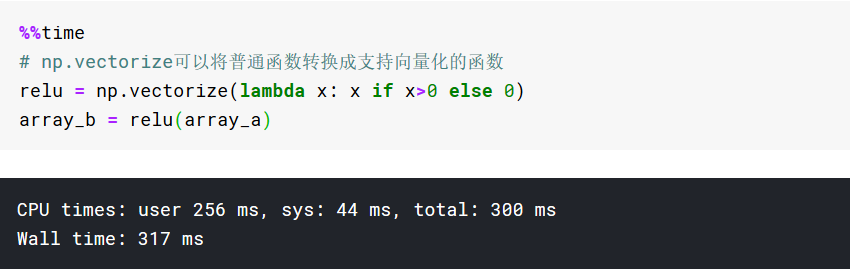
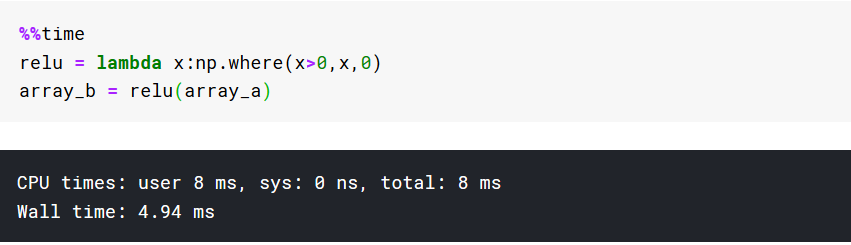
第18式,使用np.where代替if
低速方法

高速方法
八,加速你的Pandas
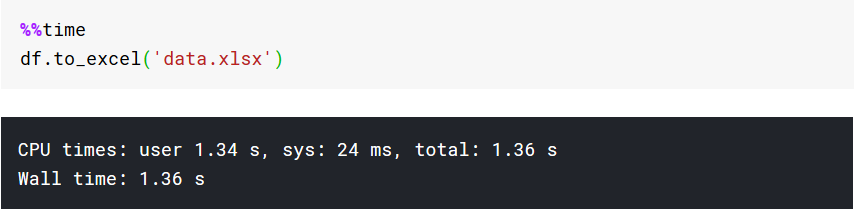
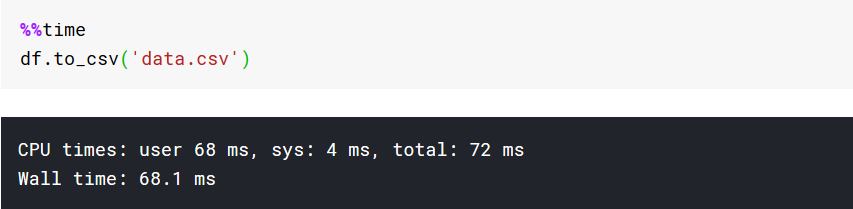
第19式,使用csv文件读写代替excel文件读写
低速方法
高速方法
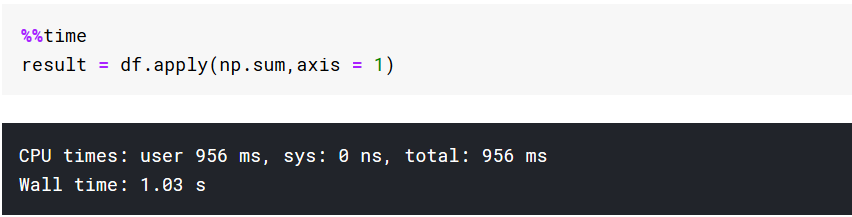
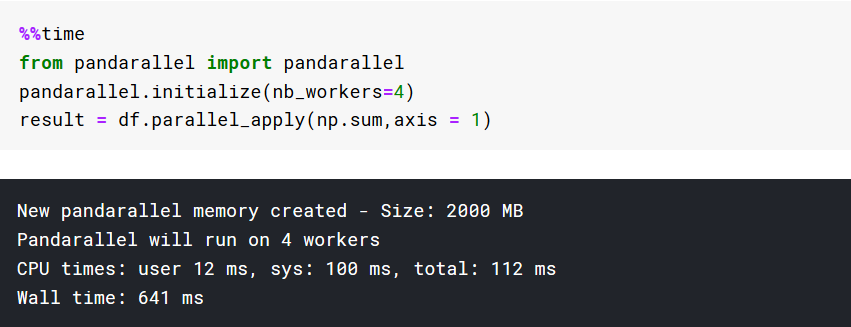
第20式,使用pandas多进程工具pandarallel
低速方法

高速方法
九,使用Dask进行加速
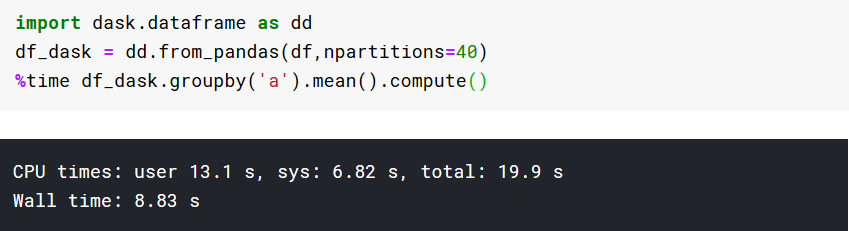
第21式,使用dask加速dataframe
低速方法
高速方法
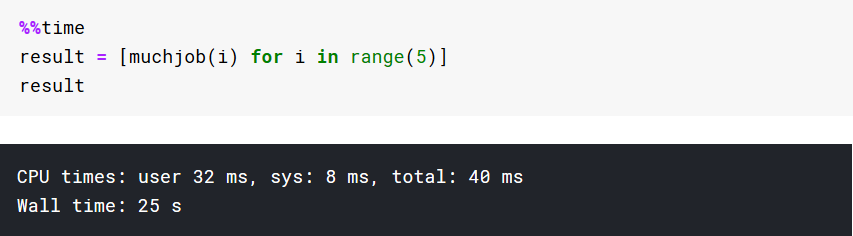
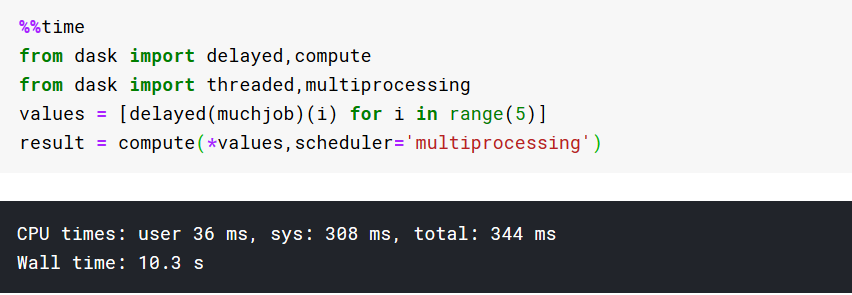
第22式,使用dask.delayed进行加速
低速方法

高速方法
十,应用多线程多进程加速
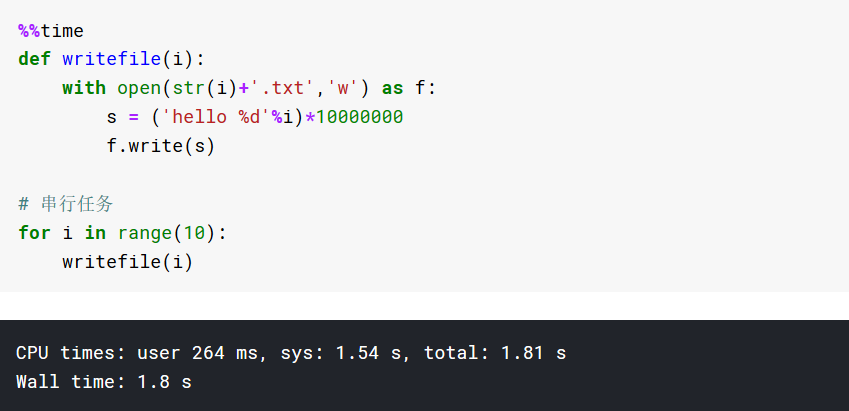
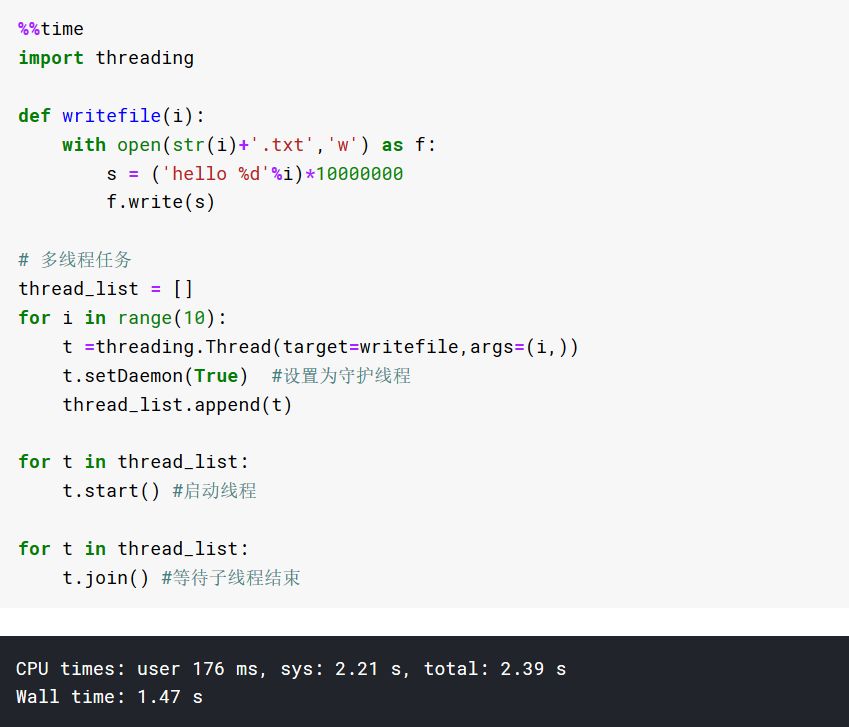
第23式,应用多线程加速IO密集型任务
低速方法
高速方法
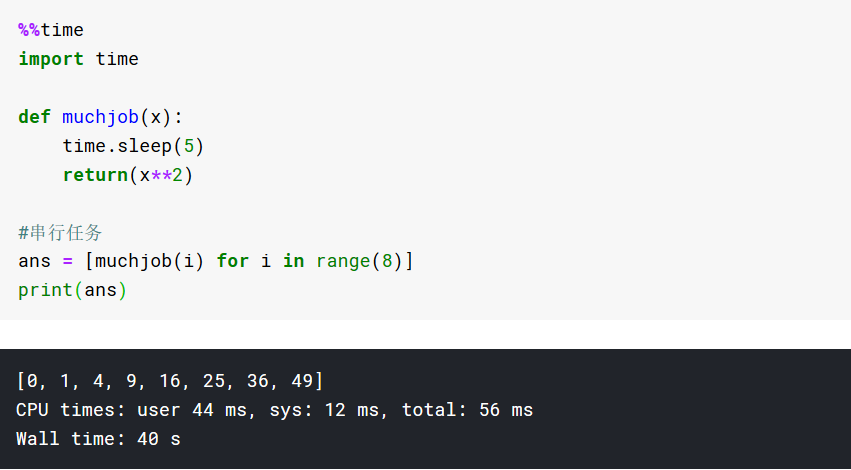
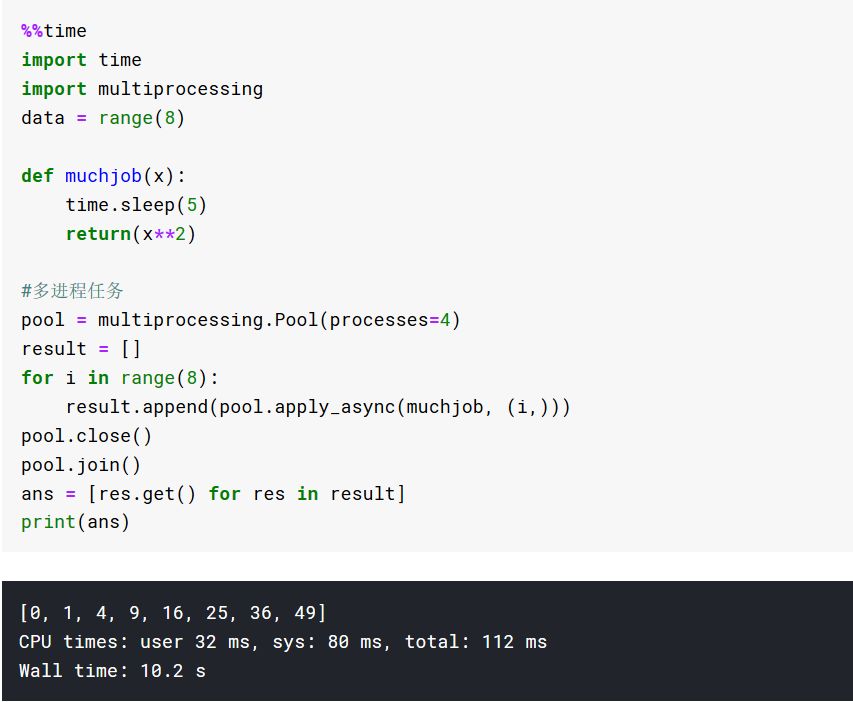
第24式,应用多进程加速CPU密集型任务
低速方法
如果你依然在编程的世界里迷茫,可以加入我们的Python学习扣qun:784758214,看看前辈们是如何学习的。交流经验。从基础的python脚本到web开发、爬虫、django、数据挖掘等,零基础到项目实战的资料都有整理。送给每一位python的小伙伴!分享一些学习的方法和需要注意的小细节,点击加入我们的 python学习者聚集地
高速方法

















 286
286

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









