



功能描述
1.高性能
输出范围±400V
带宽高达400kHz
爬升速率达500V/μs2
2.增益偏置高分辨率可调
支持最小0.05倍调节增益,调节范围0~100倍
支持最小0.2V输出加偏置电压,加偏范围±400V3
3.内置多重保护
输入过压保护,额定输入±5V,最大支持±10V,超过10V将触发保护
输出过压保护,输出过压会导致波形失真,配有软硬件控制的双重过压保护内部过热保护过功率及过流保护
4.手动操作简单
编码器快转、慢转、按压多操作识别,实现参数快调、细调、切换菜单等操作
输出按钮单击切换输出状态,连续按下优先关闭输出
5.可编程控制
上位机可编程控制,调整参数、控制输出、修改系统设置
使用RS-485通信,通信距离长,可一对多控制
程控过程
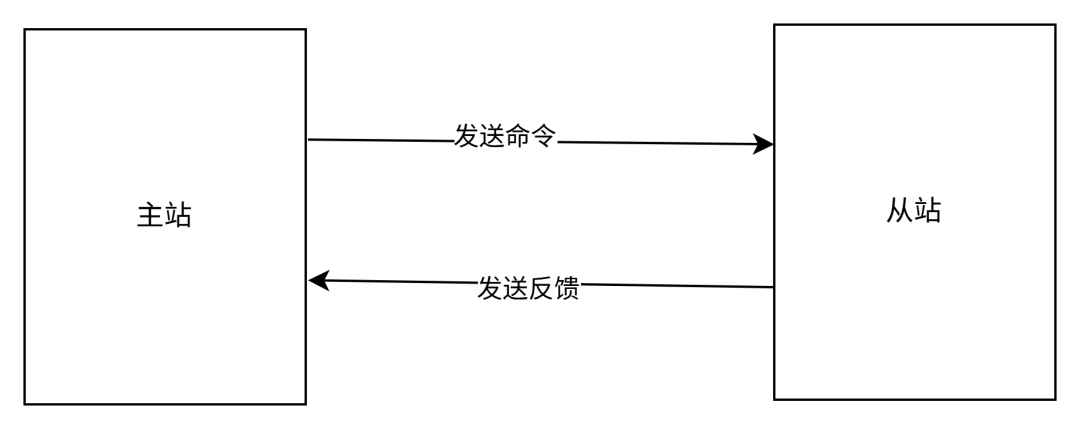
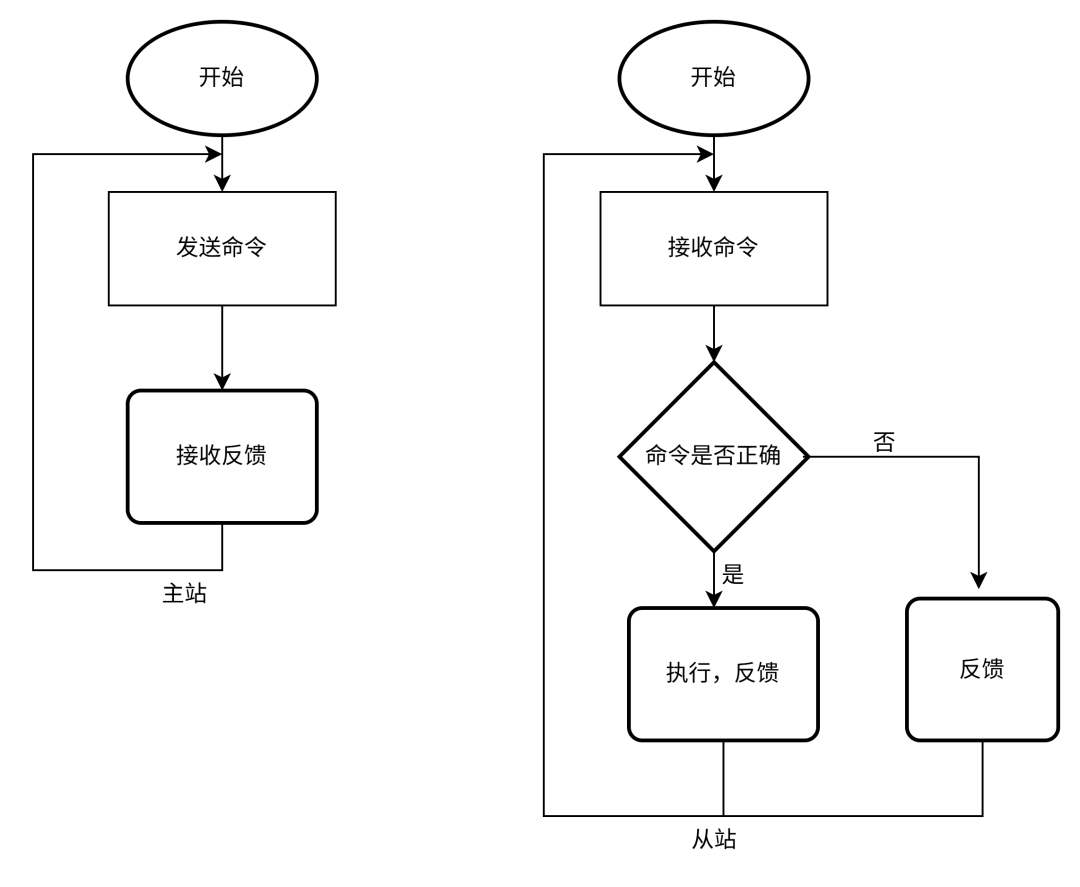
本机采用主从模式,在硬件上选用RS485半双工双线通信,使用时只需要两根信号线即可完成通信和实现控制放大器(主从站共地),传输距离远;软件协议采用Modbus RTU协议,可兼容多种设备作为主站控制。
主从模式下,先由主站发送命令到从站,从站接收到命令,判断命令是否是预先设置好的,是则执行并反馈,如果命令异常,或设备异常,则返回异常提示代码。
操作流程
1.程控接线
使用程控放大器前需要先将设备的电源、通信线、输入输出线连接(有必要时连接Monitor端进行示波器监测)。
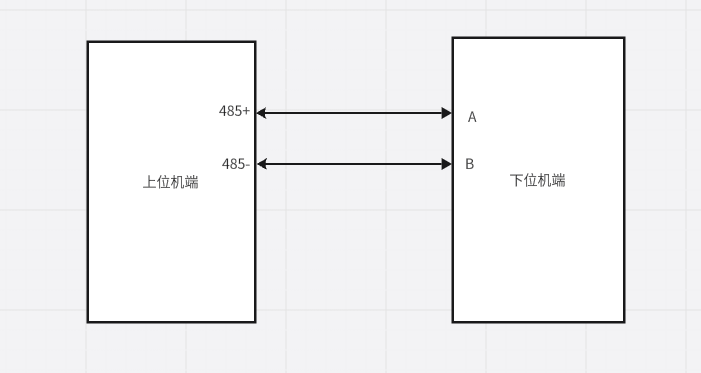
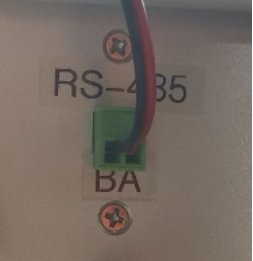
这里重点描述通信接口的接线,通信接口位于机身后盖,具有RS-485标识和通信线定义标识,如图。

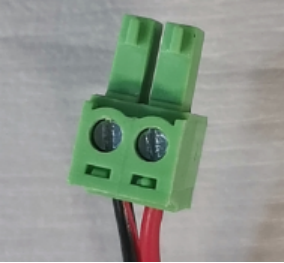
用户需要将上位机端485接口的485+、485-(对应A、B)引出,将其接入可拔插接线端子。
上位机端的端口这里使用485转接器(图为232转485转换器,仅做接线演示),用户根据需要自备合适的RS-485转换器。对于485的DB-9接口,不同厂家生产的转换器的引脚定义可能不同,厂家一般会赠送一个DB-9接线柱,将需要使用的引脚引出。这里以红色线代表A,黑色线代表B,从转换器中接出通信线。
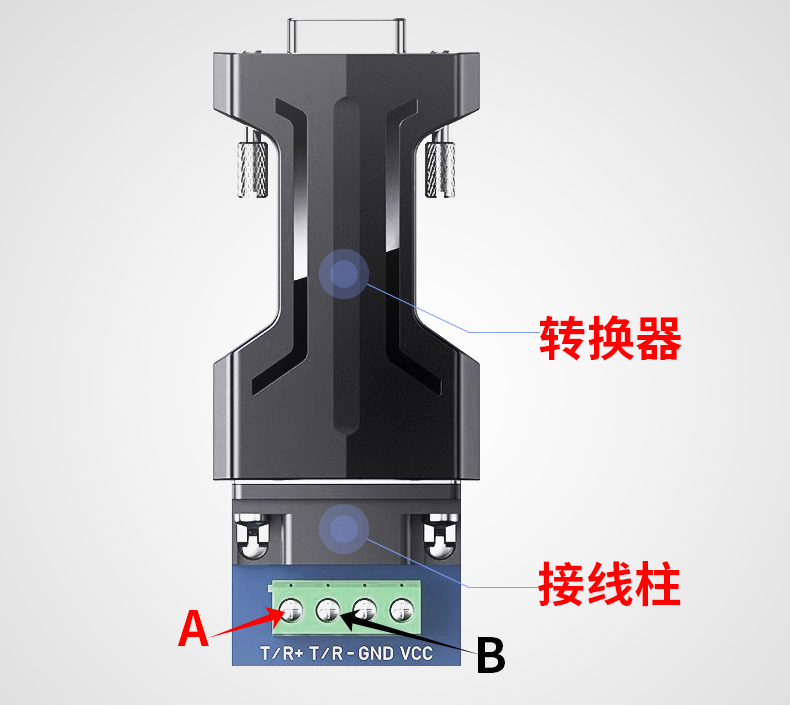
以红色线代表A,黑色线代表B,下位机端接线如图(螺丝朝上,红线接到右孔,黑线接到左孔)。
2.上位机控制
本机预设的可程控功能有多种,包括放大器参数调整和机器系统设置,功能操作由对应指令控制,用户可根据通信协议说明自定义操作,实现机器的可编程、自动化控制。
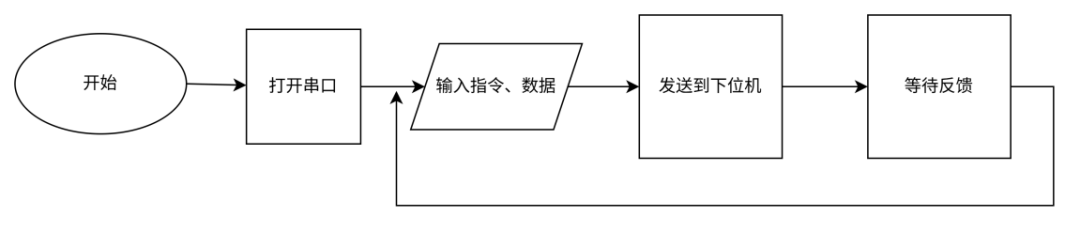
假设上位机是电脑,使用串口助手,线路连接完毕后,打开电源,等待开机,点击串口助手上的打开串口,输入指令,点击发送,等待下位机反馈,再次输入指令,重复整个过程。
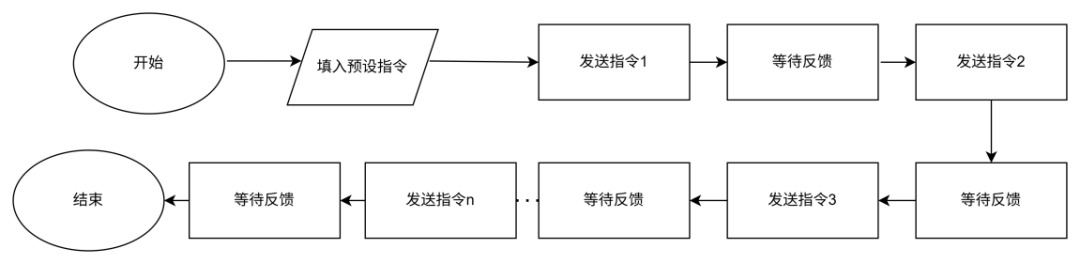
要实现自动化控制,需要用户选择一个可以定时发送数据的串口助手或者其它程序,将预设指令填入发送区,然后程序依次发送控制指令,指令包括参数设置指令(设置输出增益、偏置、输出开关控制等)和数据获取指令(输出电压、电流等)。
机器的智能化控制程度是由上位机程序决定,上位机可以获取机器的输出情况(预留有数据获取指令)和外部的模拟量变化进行更加智能化的控制,目前上位机程序需用户自备。
HA-820A是一款操作简单、应用范围广的程控高压放大器,支持0~100倍的电压增益,电压输出范围为-400V~+400V,当输出基准电压 400Vp-p 时,带宽高达 400kHz,压摆率达到500V/µs,可通过通信接口实现自动调整放大器输出增益、偏置等参数。

















 412
412

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









