



上一讲我们深入剖析了数组参数在函数中退化为指针的本质、常见误区及接口设计最佳实践,强调了数组长度必须显式传递的重要性。今天进入 Day 31:函数指针与回调机制的安全隐患,将系统讲解函数指针的原理、常见陷阱、回调机制的工程细节,以及如何安全地设计和使用函数指针。
1. 主题原理与细节逐步讲解
1.1 函数指针的本质
- 在C语言中,函数也是一种对象,可以通过其地址进行间接调用。函数指针的类型定义如下:
int add(int, int); // 普通函数声明 int (*fptr)(int, int); // 函数指针声明 fptr = add; // 赋值 int result = fptr(2, 3); // 通过指针调用 - 函数指针常用于回调机制(如排序时自定义比较函数)、事件驱动、插件、实现多态等。
1.2 回调机制
- **回调(Callback)**就是把函数指针作为参数传递给另一个函数,让它在合适时机调用你实现的函数。
void do_work(void (*callback)(int)) { // ...工作 callback(42); }
2. 相关C语言典型陷阱/缺陷说明及成因剖析
2.1 函数类型不匹配(类型安全隐患)
- 函数指针类型必须完全匹配,否则会产生未定义行为(UB)。
例如:
不同参数/返回值类型的函数不能混用指针。void foo(int); void bar(double); void (*fp)(int) = (void(*)(int))bar; // 错误,类型不匹配
2.2 回调参数未正确传递用户数据
- 常见于C标准库(如
qsort)的回调接口无法直接传递上下文,用户只能通过全局变量或静态变量传递额外信息,多线程或复用时极易出错。
2.3 函数指针未初始化或已失效
- 指向未定义/已释放的函数,或未初始化为有效地址时调用,会导致程序崩溃或行为不可预期。
2.4 错误的强制类型转换
- 将一个函数指针类型强转为另一个类型,虽然语法允许,但调用时参数解析和栈布局可能不兼容,导致严重Bug。
2.5 回调接口未做好空指针保护
- 回调函数指针为
NULL时直接调用,导致段错误(Segmentation Fault)。
2.6 动态库与ABI兼容性
- 动态加载库(如
dlopen/dlsym)获得的函数指针类型必须严格匹配,否则跨平台/跨编译器存在ABI不兼容风险。
3. 规避方法与最佳设计实践
3.1 函数指针类型要严格一致
- 定义专用的函数指针类型,避免直接用
void*或不同签名混用。typedef int (*compare_fn)(const void*, const void*);
3.2 回调接口设计推荐加用户数据参数
- 推荐标准接口加
void* user_data参数,传递上下文,避免全局变量和多线程冲突。typedef void (*callback_fn)(int, void*); void do_work(callback_fn cb, void *user_data);
3.3 调用函数指针前必须检查是否为NULL
- 避免空指针调用。
if (cb) cb(arg, user_data);
3.4 禁止强制类型转换不同签名的函数指针
- 永远不要用
(void (*)())等强制类型转换规避编译器警告。
3.5 动态库回调需严格文档和类型一致性
- 明确接口文档,主程序和动态库需用同一头文件导出声明。
4. 典型错误代码与优化后正确代码对比
错误代码1:函数指针类型不匹配,强制类型转换
void foo(int x) { /*...*/ }
void bar(double y) { /*...*/ }
void (*fptr)(int) = (void(*)(int))bar; // 错误,类型不兼容
fptr(123); // 未定义行为
正确代码:类型匹配
void foo(int x) { /*...*/ }
void (*fptr)(int) = foo;
fptr(123); // 安全
错误代码2:回调接口未传递用户数据,导致全局变量冲突
static int global_state;
void callback(int x) { global_state = x; }
void do_work(void (*cb)(int)) { cb(42); }
// 多线程或多实例时global_state被覆盖
正确代码:回调带用户数据参数
typedef void (*callback_fn)(int, void*);
void callback(int x, void *user_data) {
int *state = (int*)user_data;
*state = x;
}
void do_work(callback_fn cb, void *user_data) {
if (cb) cb(42, user_data);
}
错误代码3:未检查回调指针是否为NULL
void do_work(void (*cb)(int)) {
cb(42); // cb可能为空,崩溃
}
正确代码:加NULL检查
void do_work(void (*cb)(int)) {
if (cb) cb(42);
}
5. 必要底层原理补充
- 函数指针与数据指针类型不同,它们的ABI/调用规范在某些平台上并不兼容。
- 参数解析和栈布局均依赖于函数原型。类型不匹配时,编译器不会自动校正,导致传参混乱或栈破坏。
- 动态链接库符号查找(如
dlsym)返回void*,必须强转为正确的函数指针类型,否则调用时严重崩溃风险。
6. 图示:回调机制与用户数据传递
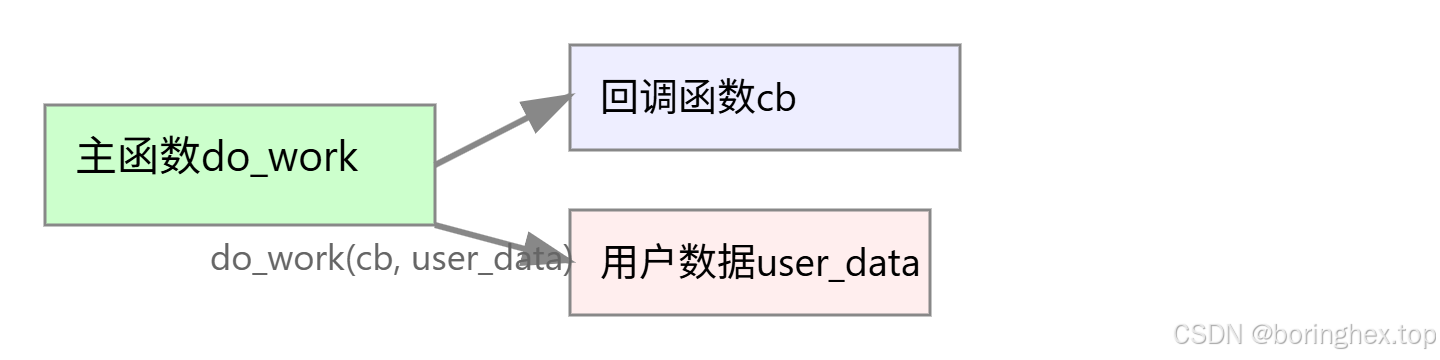
图示说明:主函数将回调函数指针和用户数据一起传递,回调内部安全访问上下文。
7. 总结与实际建议
- 函数指针强大但危险,类型必须严格匹配,绝不强转不同签名。
- 回调机制推荐携带用户数据参数,避免全局变量和多线程混乱。
- 调用函数指针前,务必做NULL检查。
- 动态库/插件开发时,主程序和库务必共享同一头文件声明接口。
结论:安全、规范地使用函数指针和回调,是C语言实现高可扩展性与高健壮性的关键。牢记类型一致性、用户数据传递和空指针保护,是避免隐蔽Bug的必经之路!
公众号 | FunIO
微信搜一搜 “funio”,发现更多精彩内容。
个人博客 | blog.boringhex.top

















 1531
1531

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









