




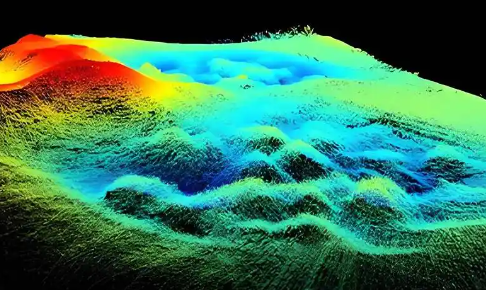
3D 点云(3D Point Cloud)是由一组三维空间中的离散点组成的数据结构,每个点通常包含 XYZ 三维坐标信息,有时还附带颜色(RGB)、反射率、法向量等属性。点云是表达和理解真实世界三维形状和结构的基础形式之一。
一、什么是“点云”?
简单来说,点云就是一个在三维空间中“用点描绘物体”的集合。
每个点代表物体或环境表面上的一个位置:
Point = (x, y, z [, r, g, b, intensity, normal, ...])
它不像图像有连续的像素格,也不像网格模型有面、边,只是一个稀疏但空间分布精确的点集合。
免费分享一套人工智能入门学习资料给大家,如果你想自学,这套资料非常全面!
关注公众号【AI技术星球】发暗号【321C】即可获取!
【人工智能自学路线图(图内推荐资源可点击内附链接直达学习)】
【AI入门必读书籍-花书、西瓜书、动手学深度学习等等...】
【机器学习经典算法视频教程+课件源码、机器学习实战项目】
【深度学习与神经网络入门教程】
【计算机视觉+NLP经典项目实战源码】
【大模型入门自学资料包】
【学术论文写作攻略工具】

二、3D 点云的来源
| 来源设备 | 描述 |
|---|---|
| LiDAR(激光雷达) | 主流的点云采集设备,广泛用于自动驾驶、机器人导航 |
| RGB-D 相机(如 Kinect、RealSense) | 同时输出彩色图像和深度图,可生成密集点云 |
| 立体视觉(双目相机) | 通过视差计算深度生成点云 |
| 结构光 / TOF 相机 | 主动光学方式获取点云数据 |
| 多视图重建 | 从多角度图像中恢复出三维点云(如 SfM、MVS) |
| CT/激光扫描仪 | 工业/医疗场景的高精度三维建模工具 |
三、点云 vs 网格 vs 体素
| 形式 | 描述 | 优点 | 缺点 |
|---|---|---|---|
| 点云(Point Cloud) | 用离散点表示三维结构 | 精度高、获取方便 | 无结构、处理复杂 |
| 网格(Mesh) | 点 + 边 + 面组成封闭模型 | 适合渲染、建模 | 生成复杂 |
| 体素(Voxel) | 像素的三维扩展(体积块) | 容易用于深度学习 | 占用内存大、分辨率低 |
四、点云的应用
-
🚗 自动驾驶:道路、障碍物、行人检测(激光雷达点云)
-
🤖 机器人导航与避障:环境建图(SLAM)、三维感知
-
🏭 工业检测:三维重建、形状比对、缺陷分析
-
🏗️ 建筑/测绘:扫描地形、建筑物,生成数字地球或BIM模型
-
🧍 人体动作捕捉:利用点云分析人体姿态和动作
-
🎮 虚拟现实 / 3D 建模:生成现实场景的高精度模型
五、点云处理的常见任务
| 任务 | 说明 |
|---|---|
| 点云滤波 | 去除噪声点,保留有效结构 |
| 配准(Registration) | 将多个点云对齐合并为一个整体(如 SLAM) |
| 分割(Segmentation) | 区分不同物体或部件 |
| 分类 / 识别 | 判断点云属于什么类型的物体(如车、人、树) |
| 重建 | 从点云生成网格或体素模型 |
| 姿态估计 | 从点云中推断物体或人的三维姿势 |
六、常用工具和框架
| 工具 | 用途 |
|---|---|
| PCL(Point Cloud Library) | C++ 开源库,功能全面 |
| Open3D | 现代化 Python/C++ 库,支持可视化和深度学习 |
| ROS | 机器人操作系统,广泛用于点云 SLAM 和导航 |
| MeshLab / CloudCompare | 点云与网格的查看与编辑工具 |
| PyTorch3D / PointNet / PointTransformer | 基于深度学习的点云分析框架 |
七、总结
3D 点云是一种灵活、精准的三维数据表示方式,是自动驾驶、机器人、工业检测、地图建模等领域的核心数据形式。尽管点云本身没有结构、难以处理,但随着激光雷达、RGB-D 相机、深度学习等技术的发展,点云的获取、处理和理解能力正日趋成熟,成为让计算机“看懂三维世界”的关键途径。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









