







自动驾驶系统自身定位和感知周围环境需要各种各样的传感器,激光雷达在自动驾驶软硬件系统有举足轻重作用,尤其是在感知系统物体识别、定位系统的SLAM和匹配定位有较高的权重。
主要介绍激光雷达的原理和架构,让大家对它有个深入的了解。
激光雷达最先应用在海洋深度探测,通过相同回波之间的时间差实现海洋深度测算。后来不断演进应用在地形地貌测绘、水下地形测量、农林业、采矿,智能家居的扫地机器人,以及近两年非常火的自动驾驶和iphone手机。
下面简单介绍激光雷达测距的原理,从测距的方法分为:三角测距法和飞行时间测距(Time of Flight),简称TOF,连续调频波(FMCW)。
单线激光雷达采用三角测距法比较多,因为探测距离短和精度较差,所以成本较低。
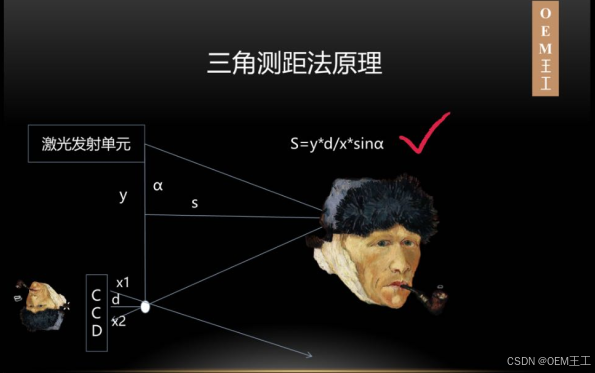
三角法的原理如下图所示,激光器发射激光,在照射到物体后,反射光由线性CCD作为接收器接收,由于激光器和探测器间隔了一段距离,所以依照光学路径,不同距离的物体将会成像在CCD 上不同的位置。按照三角公式进行计算,就能推导出被测物体的距离。
TOF激光雷达原理是利用发射和接收激光时间差,计算探测距离。这种虽然比较简单,但是精度和探测距离较远,所以自动驾驶的车载激光雷达基本应用这种类型。
 激光雷达总的结构分为激光发射单元、接收单元、扫描模块和光路系统四个模块。
激光雷达总的结构分为激光发射单元、接收单元、扫描模块和光路系统四个模块。
发射单元包含激励源、激光发射器、接收单元包含激光接收器、放大器、滤波器、信息处理模块
光路系统分为分光镜、环形镜、滤光片、准直镜和反光镜。
激光雷达按照扫描方式分为三种:机械式、半固态和全固态。
半固态激光雷达又有三种技术路线:MEMS、微转镜和棱镜
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











