




正文
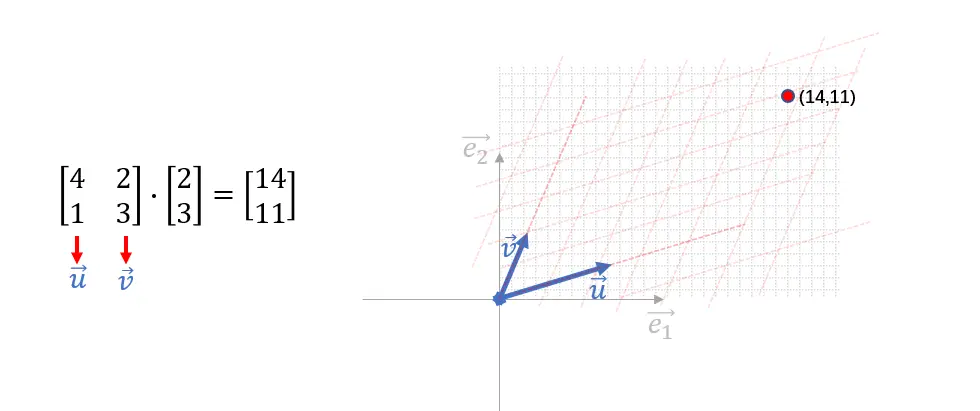
回顾之前学习过矩阵的空间视角,也就是把空间的一组基的向量按列排列构成矩阵的列向量,这个空间也就等价于矩阵的列空间,这样的矩阵乘以一个点坐标代表着把矩阵的列空间内的一个点的位置转化为在标准的欧几里得空间中进行展示:
因此,对于一个nnn维空间的一组标准正交基p⃗1,p⃗2,p⃗3,⋯ ,p⃗n\vec p_1,\vec p_2,\vec p_3,\cdots ,\vec p_np1,p2,p3,⋯,pn,也可按列进行排列( ∣ ∣ ∣ ⋯ ∣ p⃗1, p⃗2, p⃗3, ⋯ , p⃗n ∣ ∣ ∣ ⋯ ∣ )\left( \begin{array}{c} \,\,\,| \,\,\,\,\,\,\,\,\, | \,\,\,\,\,\,\,\,\, |\,\,\,\,\,\, \cdots \,\,\,\, | \,\,\,\,\,\, \\ \vec{p}_1, \ \vec{p}_2, \ \vec{p}_3, \ \cdots, \ \vec{p}_n \\ \,\,\,| \,\,\,\,\,\,\,\,\, | \,\,\,\,\,\,\,\,\, |\,\,\,\,\,\, \cdots \,\,\,\, | \,\,\,\,\,\, \\ \end{array} \right)∣∣∣⋯∣p1, p2, p3, ⋯, pn∣∣∣⋯∣
构造成矩阵,这种由空间标准基向量按列排列构成的一个nnn阶方阵称为标准正交矩阵QQQ。
标准正交矩阵Q的重要性质:\color {darkred} {\large{标准正交矩阵Q的重要性质:}}标准正交矩阵Q的重要性质:
标准正交矩阵的转置乘以它自身将得到单位矩阵I→I \toI→ QT⋅Q=I\, \, Q^T \cdot Q = IQT⋅Q=I
证明:
Q=( ∣ ∣ ∣ ⋯ ∣ p⃗1,p⃗2,p⃗3,⋯ ,p⃗n ∣ ∣ ∣ ⋯ ∣ )Q=\left( \begin{array}{c} \,\,\,| \,\,\,\,\,\,\,\,\, | \,\,\,\,\,\,\,\,\, |\,\,\,\,\,\, \cdots \,\,\,\, | \,\,\,\,\,\, \\ \vec p_1,\vec p_2,\vec p_3,\cdots ,\vec p_n \\ \,\,\,| \,\,\,\,\,\,\,\,\, | \,\,\,\,\,\,\,\,\, |\,\,\,\,\,\, \cdots \,\,\,\, | \,\,\,\,\,\, \\ \end{array} \right)Q=∣∣∣⋯∣p1,p2,p3,⋯,pn∣∣∣⋯∣
\,
QT=(p⃗1p⃗2⋯p⃗n)Q^T= \left (\begin{array}{c} \vec p_1 \\ \vec p_2 \\ \cdots \\ \vec p_n \end{array} \right )QT=p1p2⋯pn
∴QT⋅Q=(p⃗1p⃗2⋯p⃗n)×(p⃗1,p⃗2,⋯ ,p⃗n)=[p⃗1⋅p⃗1 ,p⃗1⋅p⃗2 ,⋯ p⃗1⋅p⃗np⃗2⋅p⃗1 ,p⃗2⋅p⃗2 ,⋯ p⃗2⋅p⃗n⋯p⃗n⋅p⃗1 ,p⃗n⋅p⃗2 ,⋯ p⃗n⋅p⃗n]\therefore Q^T \cdot Q = \left (\begin{array}{c} \vec p_1 \\ \vec p_2 \\ \cdots \\ \vec p_n \end{array} \right ) \times \left (\begin{array}{c} \vec p_1 , \vec p_2 , \cdots , \vec p_n \end{array} \right ) = \begin{bmatrix} \vec p_1\cdot \vec p_1 \ ,\vec p_1\cdot \vec p_2 \ ,\cdots \,\vec p_1\cdot \vec p_n \\ \vec p_2\cdot \vec p_1 \ ,\vec p_2\cdot \vec p_2 \ ,\cdots \,\vec p_2\cdot \vec p_n \\ \cdots \\ \vec p_n\cdot \vec p_1 \ ,\vec p_n\cdot \vec p_2 \ ,\cdots \,\vec p_n\cdot \vec p_n\end{bmatrix}∴QT⋅Q=p1p2⋯pn×(p1,p2,⋯,pn)=p1⋅p1 ,p1⋅p2 ,⋯p1⋅pnp2⋅p1 ,p2⋅p2 ,⋯p2⋅pn⋯pn⋅p1 ,pn⋅p2 ,⋯pn⋅pn
\,
∵\because∵ 标准正交矩阵内的向量p⃗1,p⃗2,p⃗3,⋯ ,p⃗n\vec p_1,\vec p_2,\vec p_3,\cdots ,\vec p_np1,p2,p3,⋯,pn两两之间互相垂直,就有任取两向量点乘结果为零p⃗i⋅p⃗j=0\vec p_i \cdot \vec p_j = 0pi⋅pj=0
∴QT⋅Q=[p⃗1⋅p⃗1 ,p⃗1⋅p⃗2 ,⋯ p⃗1⋅p⃗np⃗2⋅p⃗1 ,p⃗2⋅p⃗2 ,⋯ p⃗2⋅p⃗n⋯p⃗n⋅p⃗1 ,p⃗n⋅p⃗2 ,⋯ p⃗n⋅p⃗n]=I\therefore Q^T \cdot Q =\begin{bmatrix} \vec p_1\cdot \vec p_1 \ ,\vec p_1\cdot \vec p_2 \ ,\cdots \,\vec p_1\cdot \vec p_n \\ \vec p_2\cdot \vec p_1 \ ,\vec p_2\cdot \vec p_2 \ ,\cdots \,\vec p_2\cdot \vec p_n \\ \cdots \\ \vec p_n\cdot \vec p_1 \ ,\vec p_n\cdot \vec p_2 \ ,\cdots \,\vec p_n\cdot \vec p_n\end{bmatrix} = I∴QT⋅Q=p1⋅p1 ,p1⋅p2 ,⋯p1⋅pnp2⋅p1 ,p2⋅p2 ,⋯p2⋅pn⋯pn⋅p1 ,pn⋅p2 ,⋯pn⋅pn=I
联系矩阵的逆
当存在矩阵B与矩阵A相乘满足条件A×B=B×A=I,则称B是矩阵A的逆,记作:B=A−1,也即A⋅A−1=A−1⋅A=I\color {grey}{\small {当存在矩阵B与矩阵A相乘满足条件A \times B = B \times A = I,则称B是矩阵A的逆,记作:B = A^{-1},也即A \cdot A^{-1} = A^{-1} \cdot A = I}}当存在矩阵B与矩阵A相乘满足条件A×B=B×A=I,则称B是矩阵A的逆,记作:B=A−1,也即A⋅A−1=A−1⋅A=I
因此对于QT⋅Q=IQ^T \cdot Q =IQT⋅Q=I,就满足QTQ^TQT是矩阵QQQ的左逆,同时也是QQQ的右逆,所以QTQ^TQT就是矩阵QQQ的逆
∴Q−1=QT\therefore Q^{-1} = Q^T∴Q−1=QT
- 在PCA算法中,将一个高维空间降成低维空间,反过来要将低维空间再转成高维空间的时候就要利用Q−1=QTQ^{-1} = Q^TQ−1=QT这条性质,因为PCA降维后描述低维空间的方式就是标准正交矩阵,通过低维空间的标准正交矩阵把高维空间映射到低维空间,如果要把低维空间映射回高维空间就需要用到低维空间的标准正交矩阵的逆,所以直接取低维空间的标准正交矩阵的转置就方便很多了。



















 3484
3484

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











