






目录
模块功能
2025年7月29日 Open CASCADE 在 8.0.0 RC 候选发布版本中新增了 TKHelix 模块,用于生成由解析式定义的圆柱螺旋线、带锥度的圆锥螺旋线,主要功能有:
- 构造螺旋曲线适配器
Adaptor3d_Curve。这里有个疑问——OCC开发者为什么不像定义椭圆、圆曲线那样,将螺旋线定义为Geom_Curve链接,而是将其定义为适配器曲线?稍后再来讨论该问题。 - 构造螺旋线拓扑模型;
- 将螺旋线拟合为 B 样条曲线。
圆柱螺旋定义
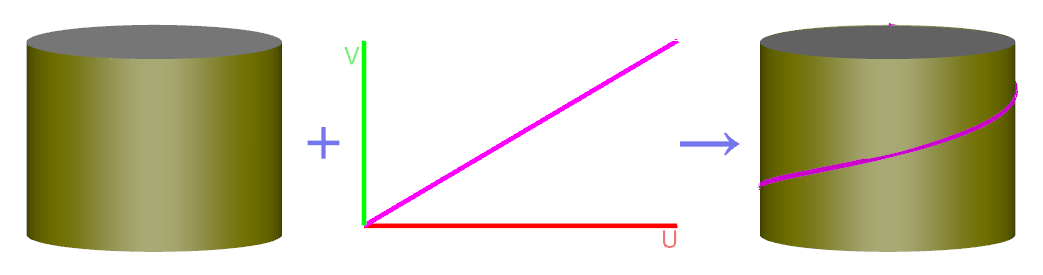
螺旋线可理解为一点绕回转轴做匀速旋转运动、沿轴线方向做平移运动这两个运动的合成运动轨迹,参数化方程为:
C
(
t
)
=
(
x
(
t
)
,
y
(
t
)
,
z
(
t
)
)
,
{
x
(
t
)
=
r
(
t
)
⋅
c
o
s
(
t
)
y
(
t
)
=
r
(
t
)
⋅
s
i
n
(
t
)
⋅
d
i
r
e
c
t
i
o
n
S
i
g
n
z
(
t
)
=
p
i
t
c
h
⋅
t
2
π
\mathbf C(t)=(x(t), y(t), z(t)), \begin{cases} x(t)= r(t) \cdot cos(t) \\ y(t) = r(t) \cdot sin(t) \cdot directionSign \\ z(t) = pitch \cdot \frac t {2\pi} \end{cases}
C(t)=(x(t),y(t),z(t)),⎩
⎨
⎧x(t)=r(t)⋅cos(t)y(t)=r(t)⋅sin(t)⋅directionSignz(t)=pitch⋅2πt
其中,
-
r
(
t
)
=
r
S
t
a
r
t
+
t
a
p
e
r
F
a
c
t
o
r
⋅
t
r(t)=rStart+taperFactor\cdot t
r(t)=rStart+taperFactor⋅t
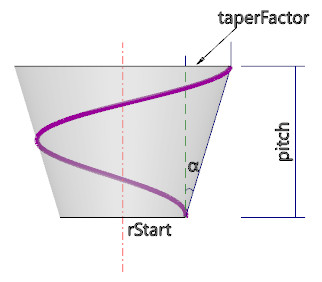
t t t为曲线参数,几何含义为绕旋转轴旋转的角度; - t a p e r F a c t o r taperFactor taperFactor 为锥度因子,每旋转一圈半径的变化量。若设圆锥顶角为 α \alpha α,可得: t a n ( α 2 ) ⋅ p i t c h = t a p e r F a c t o r ⋅ 2 π tan(\frac \alpha 2)\cdot pitch=taperFactor \cdot 2\pi tan(2α)⋅pitch=taperFactor⋅2π,如下图所示。注意,OCC中使用半锥角,而且两处实现分别使用锥度因子和半锥角,不知道为什么要这么麻烦的处理。
- r ( t ) r(t) r(t)表示生成螺旋线轨迹的旋转半径,它随着旋转角度的变化而变化;当因子 t a p e r F a c t o r taperFactor taperFactor 为 0 时, r ( t ) r(t) r(t) 为固定值,此时曲线 C ( t ) \mathbf C(t) C(t) 表示为圆柱螺旋;
- d i r e c t i o n S i g n directionSign directionSign表示螺旋的方向,默认逆时针旋转;
-
p
i
t
c
h
pitch
pitch表示螺距,
r
S
t
a
r
t
rStart
rStart初始螺旋半径。
这就是 TKHelix 螺旋线的定义方式。
运行效果
①
r
S
t
a
r
t
=
10
,
p
i
t
c
h
=
5
,
t
a
p
p
e
r
F
a
c
t
o
r
=
0
,
d
i
r
e
c
t
i
o
n
S
i
g
n
=
逆时针,
t
∈
[
0
,
6
π
]
rStart=10,pitch=5,tapperFactor=0,directionSign=逆时针,t\in[0, 6\pi]
rStart=10,pitch=5,tapperFactor=0,directionSign=逆时针,t∈[0,6π]

②
r
S
t
a
r
t
=
10
,
p
i
t
c
h
=
12
,
t
a
p
p
e
r
F
a
c
t
o
r
=
0
,
d
i
r
e
c
t
i
o
n
S
i
g
n
=
逆时针,
t
∈
[
0
,
6
π
]
rStart=10,pitch=12,tapperFactor=0,directionSign=逆时针,t\in[0, 6\pi]
rStart=10,pitch=12,tapperFactor=0,directionSign=逆时针,t∈[0,6π]

③
r
S
t
a
r
t
=
10
,
p
i
t
c
h
=
12
,
t
a
p
p
e
r
F
a
c
t
o
r
=
1
,
d
i
r
e
c
t
i
o
n
S
i
g
n
=
逆时针,
t
∈
[
0
,
6
π
]
rStart=10,pitch=12,tapperFactor=1,directionSign=逆时针,t\in[0, 6\pi]
rStart=10,pitch=12,tapperFactor=1,directionSign=逆时针,t∈[0,6π]

④
r
S
t
a
r
t
=
20
,
p
i
t
c
h
=
12
,
t
a
p
p
e
r
F
a
c
t
o
r
=
5
,
d
i
r
e
c
t
i
o
n
S
i
g
n
=
逆时针,
t
∈
[
0
,
6
π
]
rStart=20,pitch=12,tapperFactor=5,directionSign=逆时针,t\in[0, 6\pi]
rStart=20,pitch=12,tapperFactor=5,directionSign=逆时针,t∈[0,6π]

OCC 实现
模块业务逻辑
模块主要对外接口是HelixGeom_Tools、HelixGeom_BuilderHelix、HelixBRep_BuilderHelix,分别得到几何模型、拓扑模型,如下图所示:
螺旋线的其他实现1——Geom_HelixCurve方法
对于这种螺旋,还有另一种更为直接、简单的方法,如下图所示:
这种方式我在几年前曾实现过[源代码],仅支持构造圆柱螺旋,当然也可扩展支持锥度。Geom_HelixCurve所定义的圆柱螺旋线可适用于OCC所有的几何、拓扑算法。
螺旋线的其他实现2——BRep_CurveOnSurface方法
圆柱螺旋、圆锥螺旋或位于其他回转面上的螺旋线,可以看作位于曲面上的一条面上曲线,即构造 BRep_CurveOnSurface,如下图所示:
详细可参考 eryar 的博客。
不同实现对比
OCC为什么不采用这种简单的方式? 当我第一次看到 OCC 官方实现的圆柱螺旋算法时,第一印象便是疑惑、感到复杂,也就是本文开头所讲的,OCC开发者为什么不像定义椭圆、圆曲线那样,将螺旋线派生自 Geom_Curve,而是将其定义为适配器曲线?通过对比自己的实现和OCC的实现,似乎能找到一些原因。
① 对于空间任意位置的螺旋线,我实现的版本在每次获取曲线属性(如D0, D1, D2等)时,都必须执行一次变换(成员变量 lcs),这种处理在一些数值算法迭代求解过程中可能消耗更多的时间。而将其转换为 B 样条曲线之后,则不存在这样的问题。
② 将曲线派生自 Adaptor3d_Curve而不是 Geom_Curve可以在一定程度上避免被滥用,因为通常情况下,相比于Adaptor3d_Curve开发者更倾向于使用 Geom_Curve,一旦出现 Geom_HelixCurve开发者可能会优先使用。
③ OCC中的算法一般情况下,虽然可同时接收 Adaptor3d_Curve和 Geom_Curve作为输入,而当 HelixGeom_HelixCurve仅支持绕 OZ 轴的螺旋线时,受制于这样的场景限制,开发者可能被迫选择使用HelixGeom_BuilderHelix,即得到一条的 B 样条曲线而非参数化定义的螺旋线,避免因使用不当而低效。
④ 派生自 Geom_Curve的一些二次曲线,OCC中是否转换成了 B样条曲线?如果同样使用类似HelixGeom_HelixCurve的方式做处理,又是否会提高一些算法的效率?这里挖个坑,之后再专门研究。
当然,以上仅仅是我的一些猜测,欢迎提出质疑。
接下来针对以上不同实现,测试对比性能。
性能对比
在线-线距离、线-面求交两个场景下对比以上三种方法的性能,测试时三种方法按随机顺序执行N次,取平均值。
| 场景\耗时(ms) | OCC 方法 | Geom_HelixCurve 方法 | BRep_CurveOnSurface 方法 |
|---|---|---|---|
| 线-线距离 | 24.4094 | 22.2883 | 27.113 |
| 线-面求交 | 1.68902 | 1.48758 | 1.86857 |
从以上测试可以看出,HelixGeom_BuilderHelix、Geom_HelixCurve和BRep_CurveOnSurface三种方法效率没有明显差异。由于HelixGeom_BuilderHelix中bug的存在(参考下边的 Bug 章节),测试结果仅供参考,实际的性能表现还需要在具体场景中具体分析。
对于二次曲面或其他参数化曲面,如果同样将其拟合为B样条曲面,一些算法的效率是否会得到提升?这里挖一个坑,后续填上。
Bug
B样条拟合问题
在进行测试时,由HelixGeom_BuilderHelix得到的曲线不是螺旋线,而HelixGeom_HelixCurve是可以正确表达一个螺旋线的。如下图所示,使用同一组参数(
t
∈
[
0
,
2
π
]
,
p
i
t
c
h
=
5
,
r
S
t
a
r
t
=
10
,
t
a
p
e
r
F
a
c
t
o
r
=
0
)
t\in[0, 2\pi], pitch=5, rStart=10, taperFactor=0)
t∈[0,2π],pitch=5,rStart=10,taperFactor=0)构造螺旋线,洋红色是HelixGeom_HelixCurve曲线上采样点连接而成的多边形,浅灰色是HelixGeom_BuilderHelix得到的B样条曲线,可以看出后者的明显错误。这个问题可能因为B样条拟合时出错导致,或许之后需要详细调试一下。
顺逆时针标志代码错误
查看HelixGeom_HelixCurve源码如下:
gp_Pnt HelixGeom_HelixCurve::Value(const Standard_Real aT) const
{
Standard_Real aST, aCT, aX, aY, aZ, a1;
// Calculate trigonometric values and radius
aCT = cos(aT);
aST = sin(aT);
a1 = myRStart + myC1 * myTgBeta * aT;
// Calculate Cartesian coordinates
aX = a1 * aCT;
aY = a1 * aST;
if (!myIsClockWise)
{
aY = -aY;
}
aZ = myC1 * aT;
return gp_Pnt(aX, aY, aZ);
}
其中aX = a1 * aCT; aY = a1 * aST; 为逆时针旋转aT角度后的坐标值,而if (!myIsClockWise) { aY = -aY; }表示顺时针时、Y坐标值应反向。因此myIsClockWise的取值应是逆时针为true、顺时针为false。即变量应重命名为 myIsCounterClockWise。
实现不完整
HelixGeom_HelixCurve派生自Adaptor3d_Curve,但其中一个如下的虚函数(非纯虚)未实现,一些以Adaptor3d_Curve为输入、按曲线类型分情况处理的算法,不能接收螺旋线HelixGeom_HelixCurve,例如,求曲线长度方法GCPnts_AbscissaPoint::Length。
//! Returns the type of the curve in the current
//! interval : Line, Circle, Ellipse, Hyperbola,
//! Parabola, BezierCurve, BSplineCurve, OtherCurve.
Standard_EXPORT virtual GeomAbs_CurveType GetType() const;
当然,这或许也复合该模块的设计初衷——HelixGeom_HelixCurve不对外使用,只不过缺少一些防错处理。
以上这些问题后续找时间反馈给开源社区。
最后
关于该模块的应用场景,以及在对应场景中该模块可提供哪些明显优势,有了解的同学欢迎补充。
(_)等了一年的悟空,重于上线了,借用官网一张图
参考资料
转载请注明原文链接:https://blog.youkuaiyun.com/Mechanicoder/article/details/150104388


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









