



💥💥💞💞 欢迎来到本博客 ❤️❤️💥💥
🏆 博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️ 座右铭:行百里者,半于九十。
📋📋📋 本文目录如下: 🎁🎁🎁
目录
💥1 概述
一、定义:仿射光流描述了图像中像素点的运动情况,它基于仿射变换模型来估计图像中各点的运动矢量。与传统的光流不同,仿射光流考虑了图像的局部区域可能经历的更复杂的变换,不仅仅局限于平移运动。
二、应用领域:1.目标跟踪:在视频序列中,可以利用仿射光流更准确地跟踪目标物体的运动,即使目标发生旋转、缩放等仿射变换。2. 运动分析:对于分析复杂场景中的物体运动非常有用,例如机器人视觉系统中对周围环境的感知和理解。3. 图像配准:有助于将不同视角或不同时间拍摄的图像进行对齐和配准,以实现图像融合等操作。
三、计算方法:通常通过最小化特定的能量函数来求解仿射光流。这个能量函数通常包括数据项和平滑项。数据项用于确保估计的光流与图像中的实际亮度变化相匹配,而平滑项则用于保证光流场的连续性和光滑性。
四、优势与挑战:优势: 1.能够处理更复杂的运动情况,提高了对图像中运动估计的准确性。2. 对于具有仿射变换的场景具有更好的适应性。挑战: 1.计算复杂度较高,需要更多的计算资源和时间。2. 对噪声和光照变化较为敏感,可能影响光流估计的准确性。总之,仿射光流在计算机视觉中具有重要的应用价值,但也面临着一些挑战,需要不断地进行研究和改进以提高其性能。
📚2 运行结果
部分代码:
im1 = double(imread('maze1.png'))/256;
im2 = double(imread('maze2.png'))/256;
figure; imshow(im1);
figure; imshow(im2);
%% Measuring flow with conventional sampling
% We start by using the default rectilinear sampling.
%
% The motion between the test images is quite large, so to measure it we
% need to smooth quite heavily. We try a sigma of 25 pixels, and also
% sample every 25 pixels to cut down computation.
af = affine_flow('image1', im1, 'image2', im2, ...
'sigmaXY', 25, 'sampleStep', 25);
af = af.findFlow;
flow = af.flowStruct;
%%
% We can inspect the numbers for the estimated flow.
%
% Printing the flow structure shows the magnitudes of the flow components.
% See the help information for |affine_flow| to find out what these
% components mean. Note that the large negative value for vx0 corresponds
% to the overall shift of the second image to the left, and the relatively
% large value for s2 is a result of the shear caused by the depth gradient
% in the image.
disp(flow);
%%
% And we can display the estimated flow graphically.
%
% A set of flow vectors illustrating the estimated flow field is displayed
% on the first image. This does not show the points at which the flow was
% computed; these are just representative vectors at arbitrary points to
% show the form of the first-order model.
%
% The flow vectors near the bottom of the image are larger than those
% higher up. This is because the surface is closer to the camera in this
% region; the flow vectors are like stereo disparities, larger (for
% parallel cameras) for closer objects.
affine_flowdisplay(flow, im1, 50);
%%
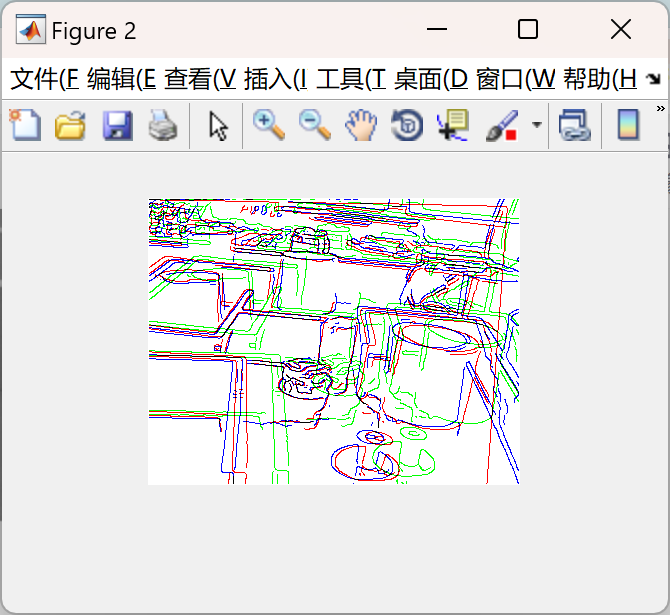
% We check whether the estimated flow registers the images.
%
% We can see whether the flow that has been found maps the first image onto
% the second, by displaying edges. Here, the green edges are the original
% first image, the blue edges are the second image, and the red edges are
% the first image after warping by the flow.
%
% If the process has worked correctly, the red and blue edges should be
% close together. We do not expect exact overlap because the first-order
% flow can only be an approximate, smooth, model of the true flow. Even the
% overall form of the real flow is a perspective rather than an affine
% transformation, and there is a lot of depth variation which adds
% complexity. Nonetheless, the affine flow gives a respectable first
% approximation.
affine_flowedgedisplay(flow, im1, im2);
%% Assessing accuracy using synthetic flow
% One way to assess the accuracy of the flow estimation is to _synthesise_
% the second image by warping the first with a known flow field, then
% seeing if we can recover the parameters of the field.
%
% First, we set some parameters, look at the flow field they generate, and
% warp the first image according to this flow.
% The parameters for the test flow field
ftest.vx0 = 5; % flow at centre of image (values changed later when
ftest.vy0 = 5; % origin is moved)
ftest.d = 0.05;
ftest.r = -0.05;
ftest.s1 = 0.05;
ftest.s2 = -0.05;
% Shift origin to image origin
ftest = affine_flow.shift(ftest, -(size(im1,2)+1)/2, -(size(im1,1)+1)/2);
% Warp the first image
wtest = affine_flow.warp(ftest); % convert to a warping matrix
ttest = maketform('affine', wtest); % make a transform structure
imtrans = imtransform_same(im1, ttest);
% Display the transformed image
imshow(imtrans);
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]辛莉莉.基于仿射模型的光流法在组织运动估计中的应用[D].中国医科大学,2019.DOI:10.27652/d.cnki.gzyku.2019.001177.
[2]辛莉莉,张勇德.基于光流的组织应变估计算法[J].中国医疗器械杂志,2019,43(01):5-9.
🌈4 Matlab代码实现


















 2167
2167

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









