



💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
一、背景与目的: 随着机器人技术的不断发展,高效的路径规划对于机器人在各种环境中的自主导航至关重要。机器人路径规划仿真的 Matlab 代码旨在通过模拟机器人在不同场景下的运动,找到从起始位置到目标位置的最优或较优路径,同时考虑各种约束条件,如障碍物、地形限制等。
二、工作流程:1. 初始化环境:设置机器人的起始位置、目标位置和环境中的障碍物。 2. 选择路径规划算法:根据具体需求选择合适的算法。 3. 执行路径规划:运行算法,计算机器人从起始位置到目标位置的路径。 4. 可视化结果:在可视化界面上展示机器人的路径和运动过程。 5. 分析与优化:根据结果进行分析,调整参数或算法以优化路径规划效果。
三、应用领域:1. 工业自动化:帮助工业机器人在工厂环境中高效地完成物料搬运、装配等任务。 2. 服务机器人:为服务机器人在室内环境中的导航提供支持,如清洁机器人、配送机器人等。 3. 无人驾驶:在无人驾驶车辆的路径规划中进行模拟和测试。 4. 科研与教育:作为研究机器人路径规划算法的工具,以及在教学中帮助学生理解路径规划的原理和方法。 总之,机器人路径规划仿真的 Matlab 代码为机器人的自主导航提供了重要的研究和开发手段,有助于提高机器人的智能化水平和工作效率。
📚2 运行结果

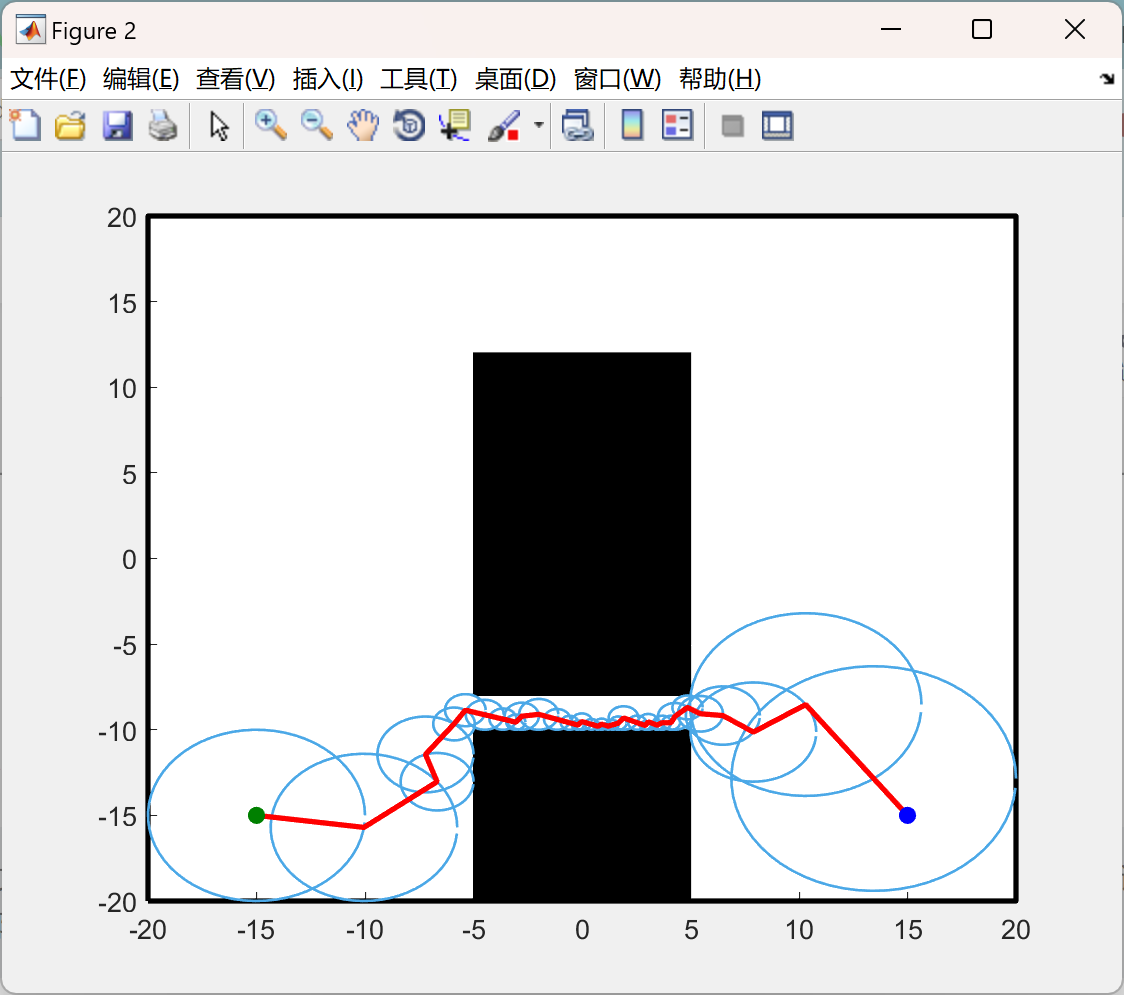
主函数部分代码:
%%
clear;
clc;
figure(2);
clf('reset');
%xlabel ('X'); ylabel ('Y')
figure(1);
clf('reset');
K = 4;
bias=0.25;
R = 0.2;
init = [-15, -15];
goal = [15,-15];
[N circles E V ] = A_mapa00(init,goal, 2);
%% ---------------- START -------------
%%
paths = [];
bolhas = [];
tempos = [];
ConjObstaculos{2}= N; %Vertices;
vet_pai = []; %local no fila_pontos repectivo ao pai
fila_pontos{1} = init; %primeiro ponto na fila
contador_resultados =1; %nero de bolhas analisadas
raio = [eucl_dist(init, nearest_point(ConjObstaculos, circles, init))]; %armazenamento do raio de cada bolha
circle2(init,raio(1));
resultado_encontrado = 0; %sinal bin锟絩io definindo se o caminho foi encontrado
tic;
while resultado_encontrado==0
if (rand <= bias)
rx = goal(1);
ry = goal(2);
else
[rx,ry] = xrand(ConjObstaculos);
end
% obtem o ponto mais primo de r
dists = [1];
for ii=1:length(fila_pontos) % Analisando os pontos da espuma
dists(ii) = eucl_dist(fila_pontos{ii},[rx,ry]);
end
[valor posicao] = min(dists);
bm = fila_pontos{posicao};
p_x = bm(1)+ raio(posicao)* ((rx-bm(1))/ sqrt( (rx-bm(1))^2 + (ry-bm(2))^2 ));
p_y = bm(2)+ raio(posicao)* ((ry-bm(2))/ sqrt( (rx-bm(1))^2 + (ry-bm(2))^2 ));
contIntersecao = 0;
for cntIntersec=length(fila_pontos):-1:1
if ~(fila_pontos{cntIntersec} == bm)
if eucl_dist(fila_pontos{cntIntersec}, [p_x p_y]) < raio(cntIntersec)
contIntersecao = contIntersecao+1;
end
end
end
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]王影,王晓茹,孙万龙,等.改进自适应精英蚁群算法的机器人路径规划[J/OL].吉林化工学院学报:1-8[2024-10-14].https://doi.org/10.16039/j.cnki.cn22-1249.2024.03.001.
[2]孟祥伟.基于模糊Elman网络的避障机器人全局路径规划[J].现代工业经济和信息化,2024,14(09):130-131+134.DOI:10.16525/j.cnki.14-1362/n.2024.09.042.
🌈4 Matlab代码实现


















 3392
3392

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









