






 本文介绍了运动编码粒子群优化算法,一种解决移动目标搜索问题的启发式优化方法,结合了PSO和生物群体行为。提供了Matlab代码示例,展示了如何在搜索场景中初始化、更新粒子位置和速度,以及评估成本函数。
本文介绍了运动编码粒子群优化算法,一种解决移动目标搜索问题的启发式优化方法,结合了PSO和生物群体行为。提供了Matlab代码示例,展示了如何在搜索场景中初始化、更新粒子位置和速度,以及评估成本函数。
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
在传统的粒子群优化中,算法通过模拟鸟群或鱼群等生物群体的行"运动编码粒子群优化"是一种基于粒子群优化(PSO)算法的变种,旨在解决移动目标搜索问题。在这种方法中,粒子代表潜在的解决方案,并通过模拟个体在解决方案空间中的移动来搜索最优解。与传统的PSO算法不同,运动编码PSO"运动编码粒子群优化"是一种启发式优化算法,用于解决复杂的优化问题,特别是涉及到移动目标的搜索任务。该算法结合了粒子群优化(PSO)和运动编码的概念。
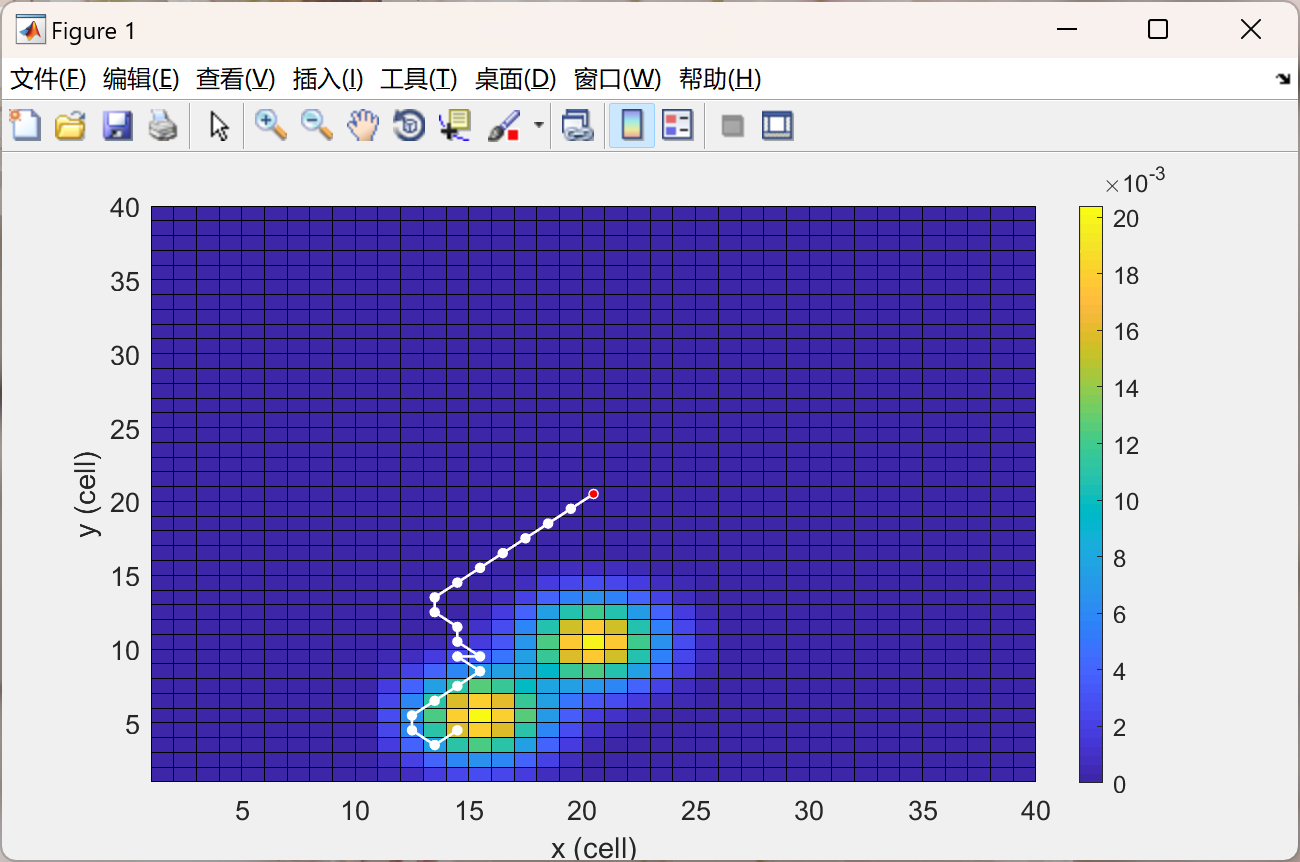
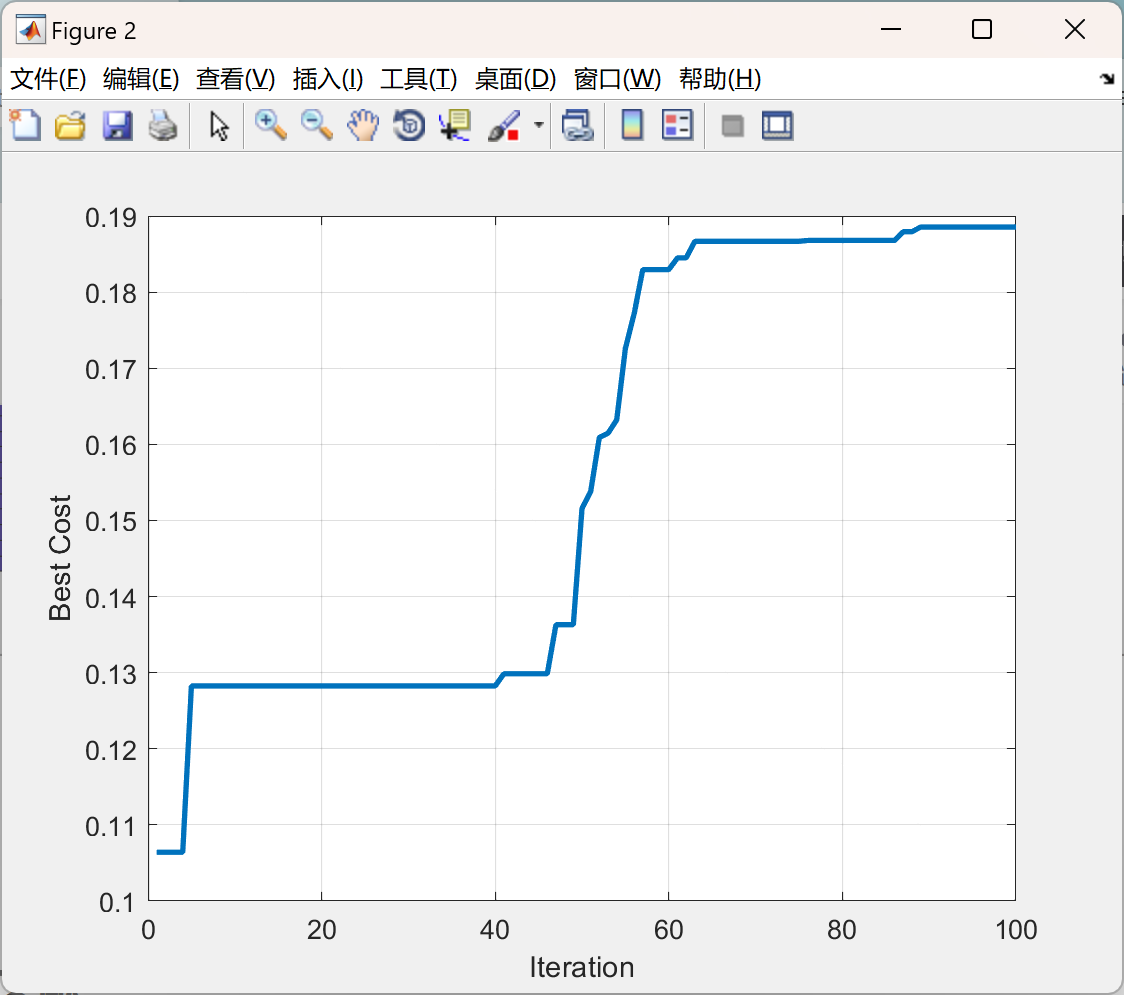
📚2 运行结果
主函数部分代码:
clc;
clear;
close all;
%% Create the search scenario
model = CreateModel(); % Create search map and parameters
CostFunction=@(x) MyCost(x,model); % Cost Function
nVar = model.n; % Number of Decision Variables = searching dimension of PSO = number of movements
VarSize=[nVar 2]; % Size of Decision Variables Matrix
VarMin=-model.MRANGE; % Lower Bound of particles (Variables)
VarMax = model.MRANGE; % Upper Bound of particles
%% PSO Parameters
MaxIt=100; % Maximum Number of Iterations
nPop=1000; % Population Size (Swarm Size)
w=1; % Inertia Weight
wdamp=0.98; % Inertia Weight Damping Ratio
c1=2.5; % Personal Learning Coefficient
c2=2.5; % Global Learning Coefficient
alpha= 2;
VelMax=alpha*(VarMax-VarMin); % Maximum Velocity
VelMin=-VelMax; % Minimum Velocity
%% Initialization
% Create an Empty Particle Structure
empty_particle.Position=[];
empty_particle.Velocity=[];
empty_particle.Cost=[];
empty_particle.Best.Position=[];
empty_particle.Best.Cost=[];
% Initialize Global Best
GlobalBest.Cost = -1; % Maximization problem
% Create an empty particle matrix, each particle is a solution (searching path)
particle=repmat(empty_particle,nPop,1);
% Initialization Loop
for i=1:nPop
% Initialize Position
particle(i).Position=CreateRandomSolution(model);
% Initialize Velocity
particle(i).Velocity=zeros(VarSize);
% Evaluation
costP = CostFunction(particle(i).Position);
particle(i).Cost= costP;
% Update Personal Best
particle(i).Best.Position=particle(i).Position;
particle(i).Best.Cost=particle(i).Cost;
% Update Global Best
if particle(i).Best.Cost>GlobalBest.Cost
GlobalBest=particle(i).Best;
end
end
% Array to Hold Best Cost Values at Each Iteration
BestCost=zeros(MaxIt,1);
%% PSO Main Loop
for it=1:MaxIt
for i=1:nPop
% Update Velocity
particle(i).Velocity = w*particle(i).Velocity ...
+ c1*rand(VarSize).*(particle(i).Best.Position-particle(i).Position) ...
+ c2*rand(VarSize).*(GlobalBest.Position-particle(i).Position);
% Update Velocity Bounds
particle(i).Velocity = max(particle(i).Velocity,VelMin);
particle(i).Velocity = min(particle(i).Velocity,VelMax);
% Update Position
particle(i).Position = particle(i).Position + particle(i).Velocity;
% Update Position Bounds
particle(i).Position = max(particle(i).Position,VarMin);
particle(i).Position = min(particle(i).Position,VarMax);
% Evaluation
costP = CostFunction(particle(i).Position);
particle(i).Cost = costP;
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]邵健帅,张鹏,王华吉等.固体运载火箭铁路运输碰撞吸能系统方案优化设计研究[J/OL].西南交通大学学报:1-8[2024-02-29].http://kns.cnki.net/kcms/detail/51.1277.U.20240229.1020.002.html.
[2]韩鹏,黄桥高,秦登辉等.基于尾流降阶模型的涡激振动俘能效率优化研究[J/OL].清华大学学报(自然科学版):1-10[2024-02-29].https://doi.org/10.16511/j.cnki.qhdxxb.2024.27.009.
[3]梁金月,周洪鑫,张雨晴等.金银花多酚和多糖同步提取工艺优化及其抗氧化活性研究[J/OL].中国食品添加剂,2024(03):1-10[2024-02-29].https://doi.org/10.19804/j.issn1006-2513.2024.3.001.


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









