




 本文详细介绍了VM4.2软件中的一系列工具类模块,包括平移旋转标定、旋转标定、单点抓取、单点纠偏、单点对位等的使用方法,涵盖了每个模块的界面、输入输出方式、限制条件和应用场景。此外,还讲解了流程配置、数据队列、脚本模块的使用,以及如何创建基准和条件检测的设置方法。
本文详细介绍了VM4.2软件中的一系列工具类模块,包括平移旋转标定、旋转标定、单点抓取、单点纠偏、单点对位等的使用方法,涵盖了每个模块的界面、输入输出方式、限制条件和应用场景。此外,还讲解了流程配置、数据队列、脚本模块的使用,以及如何创建基准和条件检测的设置方法。
目录
1.2.1 平移旋转标定:平移旋转标定模块的使用方法
描述
环境:VM4.2
现象:VM二次开发如何使用平移旋转标定模块?
解答
适用场景:单相机与机构(模组/机械手)的标定场景。
标定方式:单相机与机构做平移标定(9点标定)或平移旋转标定(12点标定)。前者适用于吸嘴与旋转轴共轴的场景,后者适用于吸嘴与旋转轴不共轴的场景)。
限制条件:不支持多相机联立坐标系。
模块界面如下:


(1)标定类型
确定标定类型是平移标定(九点标定)还是平移旋转标定(十二点标定)。平移标定如左下图:只需图像点和物理点;平移旋转标定如右下图:需要图像点、物理点、图像角度和物理角度。


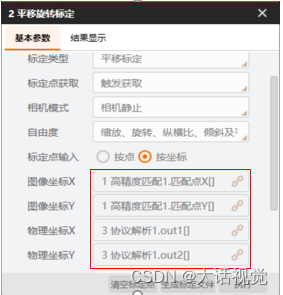
(2)标定点获取
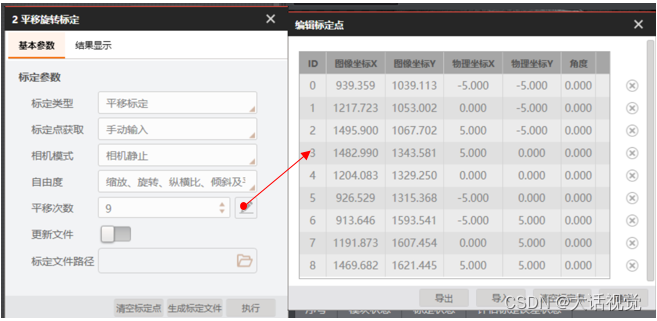
支持触发获取及手动输入两种方式。触发获取:需要订阅图像点和机构物理点作为输入参数;手动输入:手动填写图像点及物理点坐标。其中标定点输入支持按点和按坐标两种方式。
注意:由于手动输入模式缺少图像角度,故无法计算旋转一致性和左右手手性。
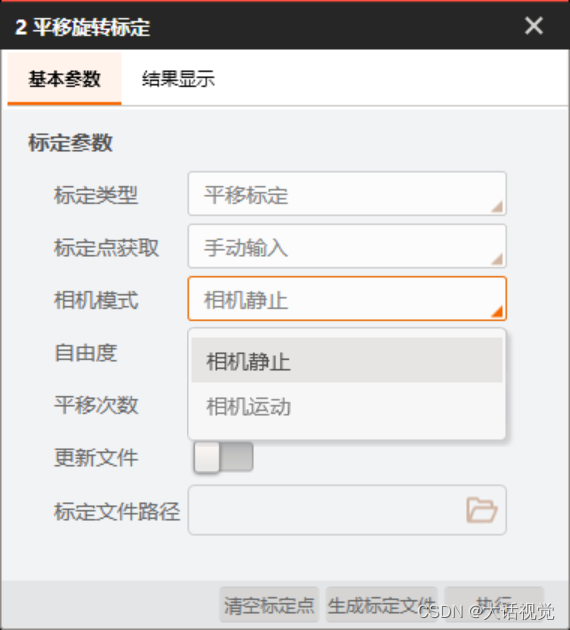
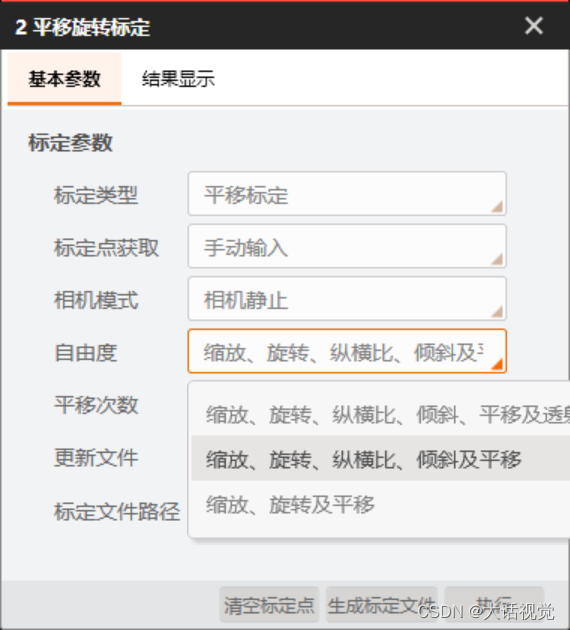
(3)相机模式:支持相机静止和相机运动两种模式。自由度:支持三种自由度,默认仿射模式。
(4)平移次数:默认9次可根据实际情况进行调整(4-16)。旋转次数:平移标定自动隐藏;平移旋转标定需手动输入,建议3次,可根据实际情况进行调整(3-16)。

(5)更新文件:默认不更新,开启后若进行一次标定,则会自动更新指定路径下的标定文件。标定文件路径:设置标定文件保存的路径(保存为xml格式)。

(6)示教(选择项,可关闭):开启后,若通讯触发字符与输入的外部触发字符相匹配,则将示教的基准图像坐标,示教点物理坐标,拍照位物理坐标(默认标定中心点坐标,如九点标定则为第五点坐标)保存至标定文件。
问题根因
不熟悉平移旋转标定模块。
1.2.2 旋转标定:旋转标定模块的使用方法
描述
环境:VM4.2
现象:VM二次开发如何使用旋转标定模块?
解答
适用场景:单相机与机构(模组/机械手)的旋转中心标定场景。
标定方式:相机静止时,机构带标定物旋转N次,相机运动时,机构带相机旋转N次,标定机构旋转轴中心坐标。
限制条件:保证运动是纯旋转(无平移),每次旋转角度需严格相等,旋转次数至少为3次。
模块界面如下:

(1)图像点
图像中特征点的像素坐标。输入支持按点和按坐标两种方式。
(2)物理旋转角度
机构每次旋转的角度值。
(3)旋转次数
机构旋转的次数。
(4)标定文件(如未加载平移标定文件,则无法标定旋转中心)
加载平移标定文件,支持.xml和.iwcal格式。刷新信号的填写说明为:空或0时,表示该模块读取标定文件后,便不再更新,一直使用第一次读取的标定文件;非零时,表示该模块运行时会读取该路径下的标定文件,当该
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1249
1249

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









