





Cog3DRangeImageVolumeCalculatorTool 工具超详细解释
Cog3DRangeImageVolumeCalculatorTool 是康耐视 VisionPro 中的 3D 深度图像体积计算工具,核心作用是对 3D 深度图(Range Image)中指定区域的空间体积进行量化计算,解决工业 3D 场景中 “物料填充量检测、工件体积验证、料箱容积利用分析” 的问题,是 3D 视觉中 “体积类检测” 的核心数据处理工具。
一、基本定位
Cog3DRangeImageVolumeCalculatorTool 是 VisionPro 中针对 3D 深度图的 “体积量化工具”,核心解决两大痛点:
- 3D 物料(如料箱内的颗粒料、装配组件)的填充量 / 体积检测时,直接分析 3D 点云难以高效计算精准体积;
- 3D 工件(如机加工零件)的体积一致性验证时,缺乏对指定区域的自动化体积计算工具。
工具核心流程:输入 3D 深度图 → 选定分析区域 → 筛选有效高度像素 → 计算区域内空间体积 → 输出体积结果 + 可视化
二、核心原理:3D 区域体积的 “筛选 - 累加” 计算逻辑
3D 深度图的每个像素对应空间点(X,Y,Z),Z 为高度值。工具通过以下步骤实现体积计算:
- 区域选定:在 2D 图像空间选定目标区域(如矩形),对应 3D 空间中的分析范围;
- 高度筛选:通过 “最小高度阈值” 过滤区域内低于该值的像素(如排除料箱底部的无效空间);
- 体积累加:对筛选后的有效像素,计算每个像素对应的 “空间体积单元”(公式:体积单元 = 像素对应实际面积 × (像素高度 - 最小高度阈值)),再累加所有单元得到总区域体积。
三、核心参数解析
工具界面分为 “设置”“区域”“图形”“结果” 四大标签页,关键参数如下:
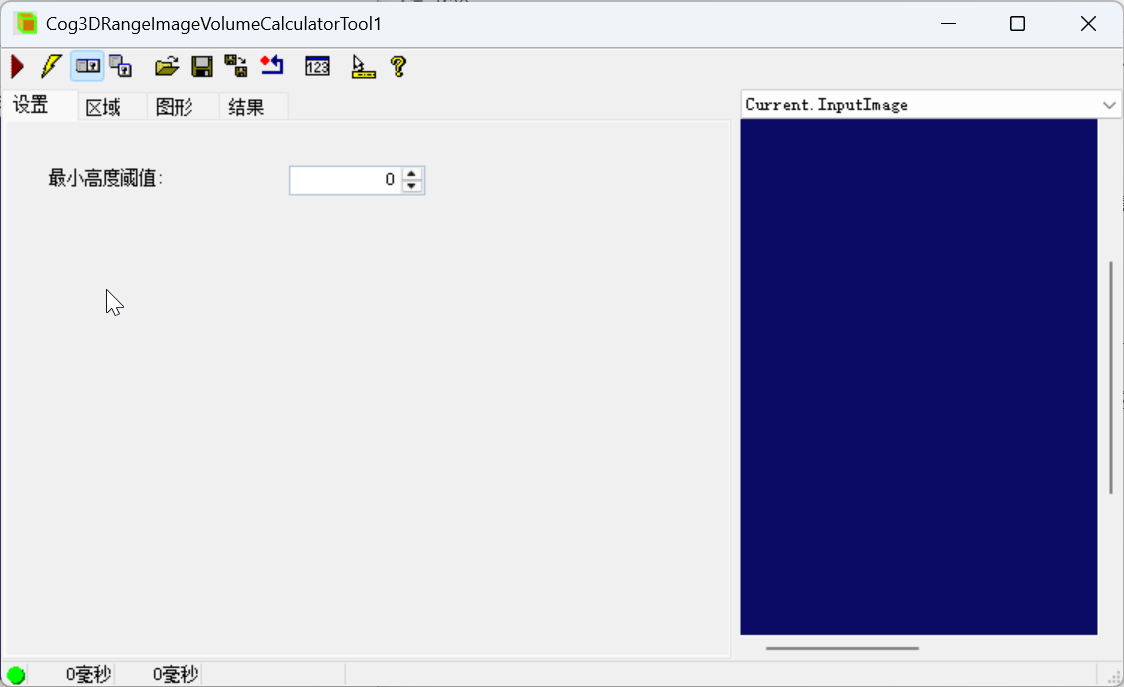
(一)“设置” 标签页(体积筛选配置)
| 参数 | 技术原理 | 实战配置技巧 |
|---|---|---|
| 最小高度阈值 | 过滤低于该值的像素(仅计算阈值以上的体积) | 测量料箱物料:设为料箱底部的高度值 |
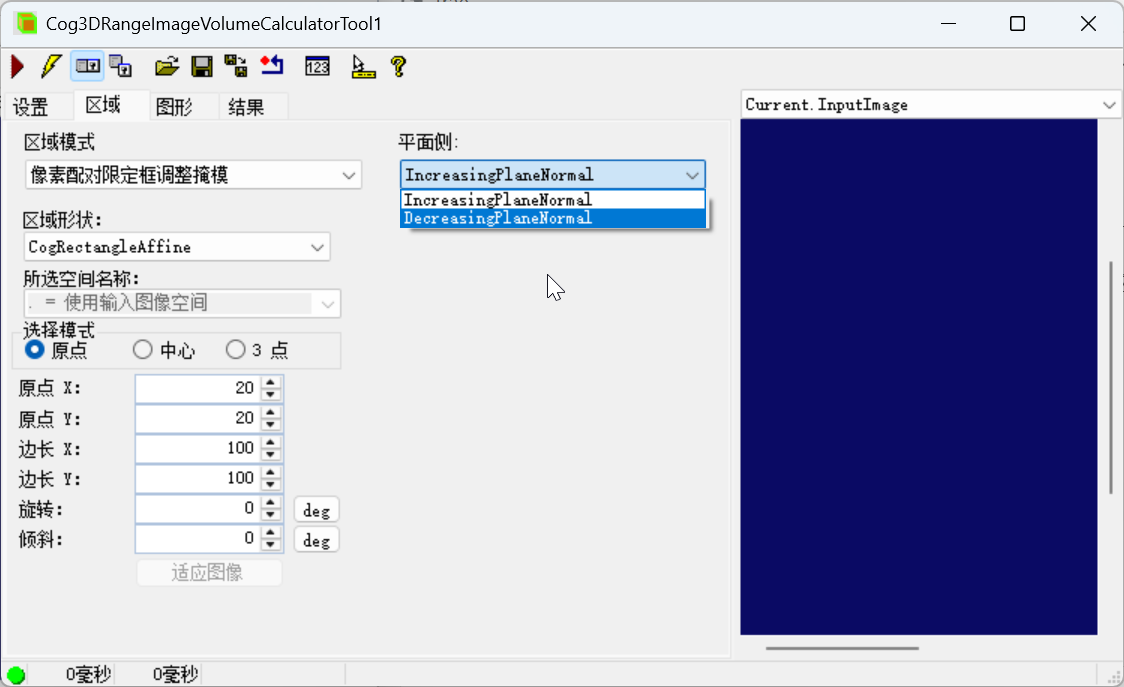
(二)“区域” 标签页(分析区域配置)
| 参数 | 技术原理 | 实战配置技巧 |
|---|---|---|
| 区域模式 | 区域的调整方式(如像素配对定框) | 常规场景选默认 “像素配对定框调整掩模” |
| 区域形状 | 分析区域的几何形状 | 矩形料箱 / 工件:选 “CogRectangleAffine” |
| 平面侧 | 体积计算的平面法向方向(递增 / 递减) | 工件上表面 / 物料顶部:选 “IncreasingPlaneNormal”;下表面选 “DecreasingPlaneNormal” |
| 选择模式(原点 / 中心 / 3 点) | 区域的定位方式 | 快速定位:选 “原点”;精准对齐:选 “3 点” |
| 原点 X/Y | 区域原点的像素坐标 | 适配目标位置:设为 X=20、Y=20(如截图) |
| 边长 X/Y | 区域的宽 / 高(像素) | 覆盖目标范围:设为 100×100(如截图) |
| 旋转 / 倾斜 | 区域的角度(单位:deg) | 目标倾斜:调整角度匹配姿态 |
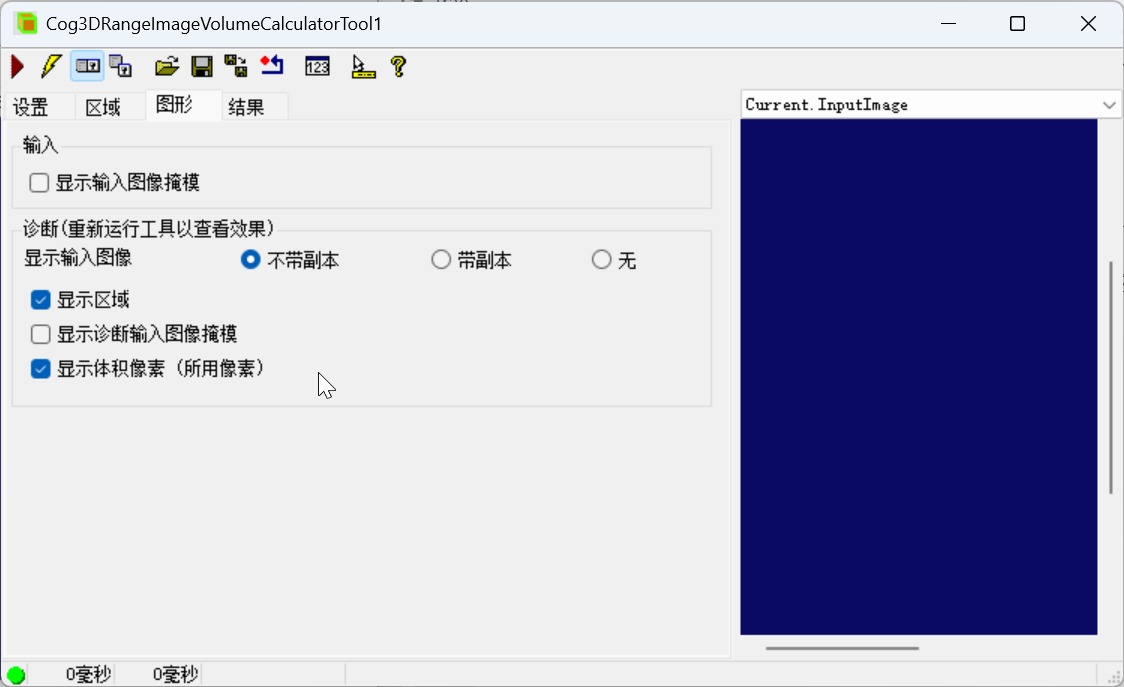
(三)“图形” 标签页(可视化配置)
| 参数 | 技术原理 | 实战配置技巧 |
|---|---|---|
| 显示区域 | 可视化分析区域的位置 | 验证区域覆盖度:勾选 |
| 显示体积像素(所用像素) | 可视化参与体积计算的有效像素 | 验证有效数据分布:勾选 |
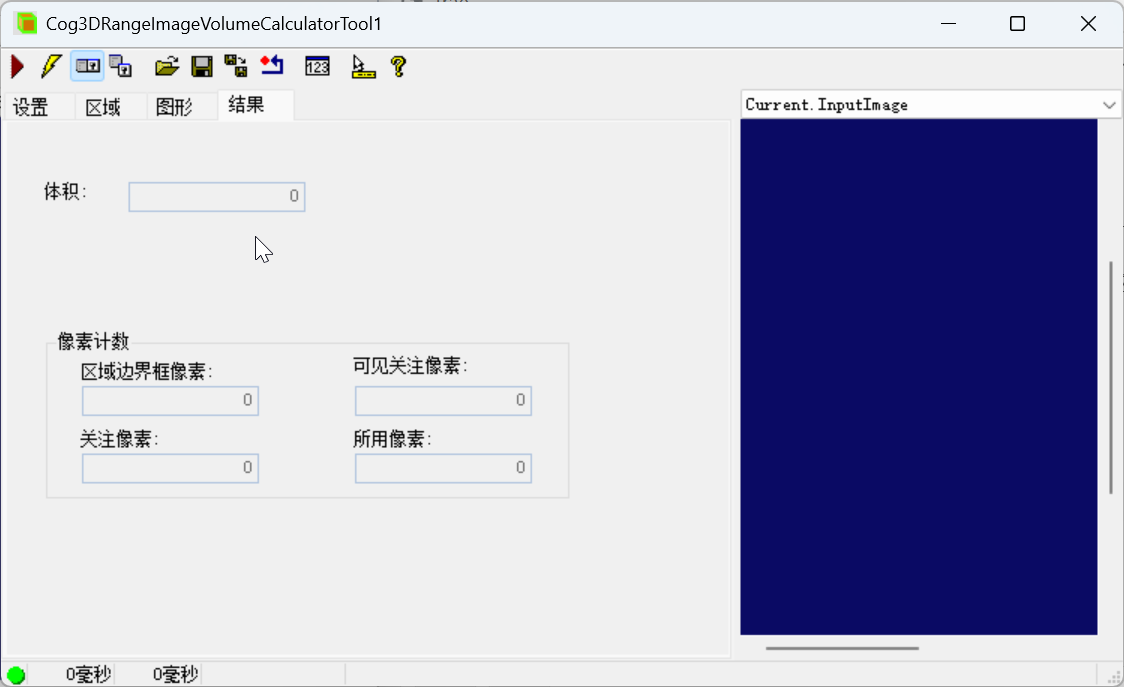
(四)“结果” 标签页(输出指标)
| 参数 | 技术原理 | 实战价值 |
|---|---|---|
| 体积 | 分析区域内的总空间体积 | 直接作为物料填充量 / 工件体积的判定依据 |
| 像素计数 | 不同范围的像素数量 | 验证区域覆盖度、有效数据量 |
四、典型应用场景
-
料箱物料填充量检测配置:区域选矩形覆盖料箱,最小高度阈值 = 料箱底部高度,平面侧选 “IncreasingPlaneNormal”;输出:体积数值;判定:体积≥额定填充量的 95% 为合格。
-
机加工工件体积验证配置:区域选工件轮廓对应的矩形,最小高度阈值 = 工件底部高度;输出:体积数值;判定:体积在理论值的 ±2% 范围内为合格。
五、实战配置示例(料箱物料填充量检测)
以 “检测 100×100 像素料箱内的物料体积” 为例:
- 区域配置:打开 “区域” 标签页,选 “CogRectangleAffine”,原点 X=20、Y=20,边长 X=100、Y=100,平面侧选 “IncreasingPlaneNormal”。
- 筛选配置:打开 “设置” 标签页,最小高度阈值设为料箱底部的高度值(如 0)。
- 运行与判定:查看 “结果” 标签页的 “体积” 数值,若≥额定填充量则判定为合格。
六、与其他工具的协同
- Cog3DImageTool:获取 3D 深度图,作为本工具的输入源;
- CogPMAlign3DTool:定位 3D 目标(如料箱)的姿态,传递区域参数(适配目标偏移场景);
- CogDecisionTool:根据本工具的体积结果,自动判定填充量 / 工件体积是否合格。
七、总结
Cog3DRangeImageVolumeCalculatorTool 是 3D 视觉中 “体积量化” 的核心工具,通过 “区域选定→高度筛选→体积累加” 的流程,实现 3D 区域体积的精准计算,完美适配物料填充量、工件体积验证等工业场景。配置核心是 “精准选定分析区域、匹配最小高度阈值”。

















 776
776

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









