




 本文详细介绍了PI控制器在电机控制中的应用原理,包括如何通过调整PI控制系数使电流跟踪给定目标值,实现对d/q轴电压的精确控制。文章还探讨了调试FOC算法和PID环节的方法,以及如何通过SVPWM实现电机平稳运行。
本文详细介绍了PI控制器在电机控制中的应用原理,包括如何通过调整PI控制系数使电流跟踪给定目标值,实现对d/q轴电压的精确控制。文章还探讨了调试FOC算法和PID环节的方法,以及如何通过SVPWM实现电机平稳运行。
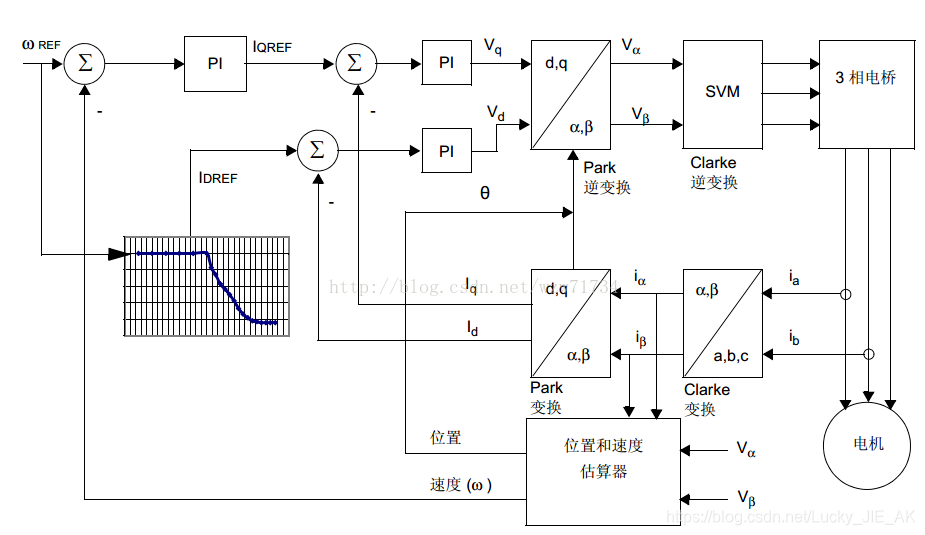
PI控制器里,输入是电流差,被控制量是d/q轴电压,通过适当的PI控制系数,使得可以在一定时间内将被控制量收敛到给定目标值上(存在一定允许的误差范围)。输入和输出之间不存在静态数学关系,但是可以通过动态的传递函数使得输出可控。
PI内部是没有物理量转換过程的,它仅仅是一个“有差就调”的原理,这也是为什么需要反馈的原因。打个比方,你开窗通风,风大了就关小点,风小了就开大点,最终能得到你想要的风量,但你自已也并不清楚窗户开度与风速的转換式。
vd和vq表示电压是因为你在vd、vq给了数就能在电机端得到相应的电压,这是由PWM调制算法和逆变器主电路决定的,跟你前面的PI调节器没关系。PI调节器只不过是不断调节这个电压,使得电流能跟踪而已。
PI只是在不停的调制它的输出,它只需要给出一个比例值就行,并不需要给出真实的我们到底需要多大的电压,真实的电压到底等于多少是由逆变器上加的母线电压Udc(它决定了六个基准向量的大小,也决定了相电压的峰值,即决定了最大不失真圆形电压矢量边界)和PI给的比例值经过ipark,svpwm运算后给出的两个基准电压和零矢量电压作用的时间来决定。
在这些控制中大部分PID环节和FOC算法都是需要调试的,一般调试的原则是从内到外,调节步骤如下:
1.先从FOC算法开始调试,采用SVPWM,先调试这个模块,人为地给两个Ualpha Ubeta,确保电机能运行,确认svpwm没问题
然后人为vq,Vd给个值;
2.确认上面之后开始调试采样电流和编码器的电角度输出;
3.人为给定Id_ref=0和Iq_ref=xxx,通过实时采样电流,调试电流环的PID,调节的目标是启动响应速度足够快,平衡运行波动足够小;通过DAC输出实时的采样电流来进行观测调试;
4.人为给定速度,调试速度环PID,输出Iq_ref,调节的目标是根据需要在足够宽的速度范围内平稳启动和运行,目前根据速度的范围分段调试PID;
5.位置环的调节,输出速度,调节目标,从一个位置快速的到达另一个位置来回跑,停止静差足够小,速度的增减足够快即瞬时速度大且需要合理的根据位置路径的长度规划一个速度曲线;

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









