






 本文详细介绍了在官方教程基础上,如何补充配置环境变量来安装和设置Gazebo模拟环境,包括修改.bashrc文件,添加环境路径,以及解决启动时的模型加载问题。
本文详细介绍了在官方教程基础上,如何补充配置环境变量来安装和设置Gazebo模拟环境,包括修改.bashrc文件,添加环境路径,以及解决启动时的模型加载问题。
首先这是官网安装gazebo以及搭建模拟环境的教程,里面缺少了配置环境变量的步骤
这里我做一个补充
首先要打开 ~/.bashrc 文件
添加以下内容
source /usr/share/gazebo/setup.sh
export GAZEBO_MODEL_PATH=~/ardupilot_gazebo/models:${GAZEBO_MODEL_PATH}
export GAZEBO_MODEL_PATH=~/ardupilot_gazebo/models_gazebo:${GAZEBO_MODEL_PATH}
export GAZEBO_RESOURCE_PATH=~/ardupilot_gazebo/worlds:${GAZEBO_RESOURCE_PATH}保存退出 ,之后再source一下,让它生效
source ~/.bashrc
之后我们可以执行官网给出的
gazebo --verbose worlds/iris_arducopter_runway.world这个时候,我的模拟器会卡在启动界面,显示在加载某个模型
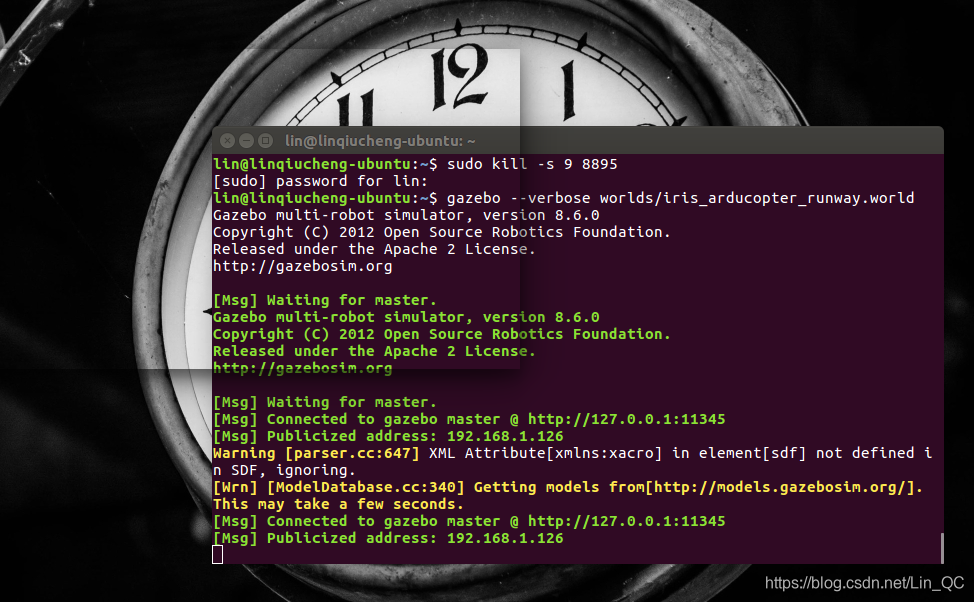
警告信息
Warning [parser.cc:647] XML Attribute[xmlns:xacro] in element[sdf] not defined in SDF, ignoring.
[Wrn] [ModelDatabase.cc:340] Getting models from[http://models.gazebosim.org/]. This may take a few seconds.
解决办法
关闭网络,重新执行命令,虽然会有一些报错,但是可以正常开启
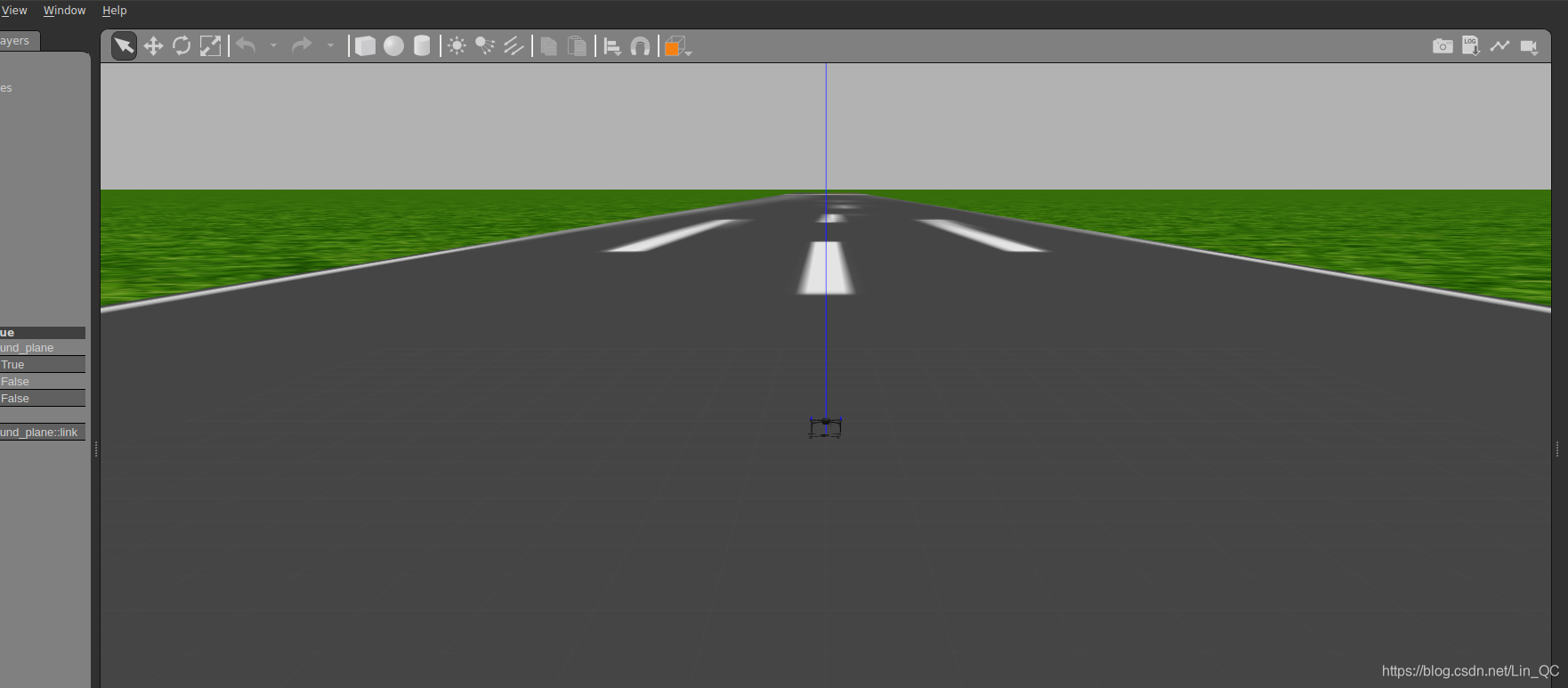
开启后,可以重新连接网络

















 1108
1108

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









