



背景,上次实现的绘制直角+偶数边的多边形,无法实现对称边边长一致,为了改进这一功能,现在添加对称处理。
一、代码
//-----------------------------------------------------------------------------
//----- acrxEntryPoint.cpp
//-----------------------------------------------------------------------------
#include "StdAfx.h"
#include "resource.h"
#include <vector>
//-----------------------------------------------------------------------------
#define szRDS _RXST("AB")
const int MAX = 50;
//-----------------------------------------------------------------------------
//----- ObjectARX EntryPoint
class CArxProject4App : public AcRxArxApp {
public:
CArxProject4App() : AcRxArxApp() {}
virtual AcRx::AppRetCode On_kInitAppMsg(void* pkt) {
// TODO: Load dependencies here
// You *must* call On_kInitAppMsg here
AcRx::AppRetCode retCode = AcRxArxApp::On_kInitAppMsg(pkt);
// TODO: Add your initialization code here
return (retCode);
}
virtual AcRx::AppRetCode On_kUnloadAppMsg(void* pkt) {
// TODO: Add your code here
// You *must* call On_kUnloadAppMsg here
AcRx::AppRetCode retCode = AcRxArxApp::On_kUnloadAppMsg(pkt);
// TODO: Unload dependencies here
return (retCode);
}
virtual void RegisterServerComponents() {
}
//*****************命令FF函数***************************
static void ABMyGroupFF() {
// Put your command code here
AcGePoint2d pA[MAX];//存储多段线顶点坐标
int num = 0;//存储多段线顶点数量
GetPolylineCoordinates(pA, num);//获取多段线顶点坐标
//ShowCoordinates(pA, MAX);//显示获取的坐标
//acutPrintf(_T("获取多段线顶点坐标正常执行"));
if (num == 0)
{
acutPrintf(_T("失败,退出功能"));
return;
}
//*****************处理首点***************************
struct XY
{
double value;
int In;
};
AcGePoint2d pB[MAX];
double x_p = pA[0].x;
double y_p = pA[0].y;
for (int i = 0; i < num; i++)
{
if (x_p > pA[i].x)
{
x_p = pA[i].x;
}
if (y_p < pA[i].y)
{
y_p = pA[i].y;
}
}
//acutPrintf(_T("star:%g,%g\n"), x_p, y_p);
AcGePoint2d start(x_p, y_p);
double dist = start.distanceTo(pA[0]);
int ci = 0;
for (int i = 1; i < num; i++)
{
double ds = start.distanceTo(pA[i]);
if (ds < dist)
{
dist = ds;
ci = i;
}
}
//acutPrintf(_T("ci-A:%d\n"), ci);
//acutPrintf(_T("pA[ci]:%g,%g\n"), pA[ci].x, pA[ci].y);
//*****************处理顺时针排序(有向面积法)***************************
double A = 0;
for (int i = 0; i < num; i++)
{
A += pA[i].x * pA[i + 1].y - pA[i + 1].x * pA[i].y;
}
A += pA[num - 1].x * pA[0].y - pA[0].x * pA[num - 1].y;
A = 0.5 * A;
if (A < 0)//顺时针排序
{
int cB = 0;
for (int i = ci; i < num; i++)
{
pB[cB] = pA[i];
cB++;
//acutPrintf(_T("pB[%d]:%g,%g\n"), cB - 1, pA[i].x, pA[i].y);
}
for (int i = 0; i < ci; i++)
{
pB[cB] = pA[i];
cB++;
//acutPrintf(_T("pB[%d]:%g,%g\n"), cB - 1, pA[i].x, pA[i].y);
}
}
else//逆时针排序
{
AcGePoint2d pC[MAX]; int tc = 0; int di = 0;
for (int i = num - 1; i >= 0; i--)
{
pC[tc] = pA[i];
tc++;
if (ci == i)
{
di = tc - 1;
}
}
int cB = 0;
for (int i = di; i < num; i++)
{
pB[cB] = pC[i];
cB++;
//acutPrintf(_T("pB[%d]:%g,%g\n"), cB - 1, pC[i].x, pC[i].y);
}
for (int i = 0; i < di; i++)
{
pB[cB] = pC[i];
cB++;
//acutPrintf(_T("pB[%d]:%g,%g\n"), cB - 1, pC[i].x, pC[i].y);
}
}
for (int i = 0; i < num; i++)
{
pA[i] = pB[i];
}
//*****************计算距离***************************
double dis[MAX];
CalDistance(pA, num, dis);//计算原始两点间距离
int dir[MAX];
for (int i = 0; i < MAX; i++)
{
dir[i] = 0;
}
AcDbPolyline* pl = new AcDbPolyline();
AcDbPolyline* pd = new AcDbPolyline();
int index = 0;
//acutPrintf(_T("计算两点间距离正常执行"));
//*****************计算文本位置***************************
AcGePoint2d pT[MAX];
for (int i = 0; i < num - 1; i++)
{
pT[i].x = (pA[i].x + pA[i + 1].x) / 2;
pT[i].y = (pA[i].y + pA[i + 1].y) / 2;
}
pT[num-1].x = (pA[0].x + pA[num-1].x) / 2;
pT[num-1].y = (pA[0].y + pA[num-1].y) / 2;
//*****************显示边长序号***************************
for (int i = 0; i < num ; i++)
{
AcDbText* pText = new AcDbText();
AcGePoint3d p3d(pT[i].x, pT[i].y, 0);
CString cst;
cst.Format(_T("%d"), i + 1);
pText->setTextString(cst);
pText->setPosition(p3d);
pText->setHeight(0.5);
pText->setLayer(_T("0"));
AcDbBlockTable* pBT;
acdbHostApplicationServices()->workingDatabase()->getBlockTable(pBT, AcDb::kForRead);
AcDbBlockTableRecord* pBTR;
pBT->getAt(ACDB_MODEL_SPACE, pBTR, AcDb::kForWrite);
pBTR->appendAcDbEntity(pText);
pBT->close();
pBTR->close();
pText->close();
}
//*****************************获取输入的字符串*********************************************
int bLoop;
TCHAR result3[50] = { 999 };
int st3 = acedGetString(0, _T("\n对称处理[是(1)/否(2)]:"), result3);
if (st3 == RTNORM)
{
if (_ttoi(&result3[0]) == 1)
{
bLoop = 1;
}
else if (_ttoi(&result3[0]) == 2)
{
bLoop = 0;
}
}
else if (st3 == RTCAN)
{
acutPrintf(_T("用户取消\n"));
return;
}
struct DC
{
int num1;
int num2;
};
DC dd[MAX]; int index_DC=0;
while (bLoop)
{
TCHAR result[50] = {999};
TCHAR result2[50] = {999};
int st = acedGetString(0, _T("\n对称1号边序号:"), result);
if (st == RTCAN)
{
acutPrintf(_T("用户取消\n"));
bLoop = false;
break;
}
if (st == RTNORM)
{
if (_ttoi(&result[0]) == 0)
{
acutPrintf(_T("对称选择结束\n"));
break;
}
else
{
int st2 = acedGetString(0, _T("\n对称2号边序号:"), result2);
if ((st == RTNORM) & (st2 == RTNORM))
{
if (_ttoi(&result2[0]) == 0)
{
acutPrintf(_T("对称选择错误,退出功能\n"));
bLoop = 3;
break;
}
dd[index_DC].num1 = _ttoi(&result[0]);
dd[index_DC].num2 = _ttoi(&result2[0]);
index_DC++;
//acutPrintf(_T("\ndd[index_DC-1]:%d\n"), dd[index_DC-1].num1);
//acutPrintf(_T("dd[index_DC-2]:%d\n"), dd[index_DC-1].num2);
}
else if ((st == RTCAN) || (st2 == RTCAN))
{
acutPrintf(_T("用户取消\n"));
bLoop = 3;
break;
}
else if ((st == RTERROR) || (st2 == RTERROR))
{
acutPrintf(_T("输入错误\n"));
bLoop = 3;
break;
}
else if ((st == RTREJ) || (st2 == RTREJ))
{
acutPrintf(_T("输入无效\n"));
bLoop = 3;
break;
}
}
}
}
if (bLoop == 3)
{
return;
}
//acutPrintf(_T("index_DC:%d\n"), index_DC);
//*****************************修改距离值*********************************************
for (int i = 0; i < index_DC; i++)
{
int n1 = dd[i].num1 - 1;
int n2 = dd[i].num2 - 1;
if ((n1 < num - 1) & (n2 < num - 1))
{
//acutPrintf(_T("dis[n1]-1:%f\n"), dis[n1]);
//acutPrintf(_T("dis[n2]-1:%f\n"), dis[n2]);
dis[n1] = (dis[n1] + dis[n2]) / 2;
int a = static_cast<int>(dis[n1] * 100);
if (a % 2)
{
a = a + 1;
}
dis[n1] = double(a) / 100;
dis[n2] = dis[n1];
//acutPrintf(_T("dis[n1]-2:%f\n"), dis[n1]);
//acutPrintf(_T("dis[n2]-2:%f\n"), dis[n2]);
}
if ((n1 == num - 1) || (n2 == num - 1))
{
if ((n1 == num-1)&(n2!=num-1))
{
dis[n2]=(pA[0].distanceTo(pA[num - 1])+ dis[n2])/2;
int a = static_cast<int>(dis[n2] * 100);
if (a % 2)
{
a = a + 1;
}
dis[n2] = double(a) / 100;
//acutPrintf(_T("n1 == num-1:%d\n"), n1);
}
else if((n2==num-1 )& (n1 != num - 1))
{
dis[n1] = (pA[0].distanceTo(pA[num - 1]) + dis[n1]) / 2;
int a = static_cast<int>(dis[n1] * 100);
if (a % 2)
{
a = a + 1;
}
dis[n1] = double(a) / 100;
//acutPrintf(_T("n2 == num-1:%d\n"), n2);
}
else if ((n2 == num - 1) & (n1 == num - 1))
{
acutPrintf(_T("输入错误,请核查\n"));
}
}
}
//*****************处理第一条边的坐标***************************
//第一步,计算与X轴正方向的角度(弧度)
AcGeVector2d Vab = pA[1] - pA[0];
double Angle_ab = Vab.angle();
//计算增量
double dx = dis[0] * cos(Angle_ab);
double dy = dis[0] * sin(Angle_ab);
//计算新的B点
AcGePoint2d ptB_1(pA[0].x + dx, pA[0].y + dy);
//更改数组中的B点坐标
pA[1] = ptB_1;
//调用函数绘制起始线
pl->addVertexAt(index, pA[0]);
index++;
pl->addVertexAt(index, ptB_1);
index++;
//acutPrintf(_T("A点坐标:%g,%g\n"), pA[0].y, pA[0].x);
//acutPrintf(_T("B点坐标:%g,%g\n"), pA[1].y, pA[1].x);
//acutPrintf(_T("第一条边正常执行"));
//***********************处理方向*********************************
pd->addVertexAt(0, pA[0]);
pd->addVertexAt(1, pA[1]);
for (int i = 2; i < num; i++)
{
pd->addVertexAt(i, pA[i]);
}
Direction(pd, dir);
pd->close();
//acutPrintf(_T("处理方向正常执行"));
//***********************批处理中间节点*********************************
for (int i = 0; i < num - 2; i++)
{
if (dir[i] == 1)
{
pA[i + 2] = DrawPolyline_Left(pA[i], pA[i + 1], dis[i + 1], pl, index);
}
else if (dir[i] == 2)
{
pA[i + 2] = DrawPolyline_Right(pA[i], pA[i + 1], dis[i + 1], pl, index);
}
}
//acutPrintf(_T("批处理中间节点正常执行"));
//***************************处理末位节点****************************
int numvertex = pl->numVerts();
//acutPrintf(_T("numvertex:%d\n"), numvertex);
AcGePoint2d ptc;
pl->getPointAt(numvertex - 2, ptc);
AcGePoint2d ptd;
pl->getPointAt(numvertex - 1, ptd);
AcGePoint2d pta;
pl->getPointAt(0, pta);
AcGePoint2d ptb;
pl->getPointAt(1, ptb);
AcGeVector2d vecPrev = pta - ptb;
//acutPrintf(_T("获取末位节点正常执行"));
//AcGeVector2d Vcd = ptd - ptc;
//double Angle_cd = Vcd.angle();
//double dx1 = dis[num - 2] * cos(Angle_cd);
//double dy1 = dis[num - 2] * sin(Angle_cd);
//AcGePoint2d ptE_1(ptc.x + dx1, ptc.y + dy1);
AcGeVector2d vecNext = vecPrev.perpVector();//取逆时针,前进方向的左侧
//AcGeVector2d vecNext = vecPrev.perpVector().negate();//取顺时针
vecNext.normalize();
AcGePoint2d ptE = pta + vecNext * 500;
AcGeLine2d l1(ptc, ptd);
AcGeLine2d l2(pta, ptE);
AcGePoint2d ii;
int sta = l2.intersectWith(l1, ii);
//acutPrintf(_T("ptE:%g,%g\n"), ptE.y,ptE.x);
//acutPrintf(_T("ii:%g,%g\n"), ii.y,ii.x);
/* AcDbLine* pline1 = new AcDbLine(AcGePoint3d(ptd.x, ptd.y, 0), AcGePoint3d(ptE.x, ptE.y, 0));
AcDbLine* pline2 = new AcDbLine(AcGePoint3d(ptb.x, ptb.y, 0), AcGePoint3d(pta.x, pta.y, 0));
AcGePoint3dArray pt_intersect3d;
pline1->intersectWith(pline2, AcDb::kOnBothOperands, pt_intersect3d);
int ll = pt_intersect3d.length();
if (ll >= 1)
{
AcGePoint2d intersect2d(pt_intersect3d[0].x, pt_intersect3d[0].y);
pl->addVertexAt(index, intersect2d);
pl->removeVertexAt(0);
}*/
pl->addVertexAt(index, ii);
pl->removeVertexAt(index - 1);
//****************************输入块表******************************
//结尾代码
//pl->setPointAt(0, intersect2d);
pl->setClosed(true);//闭合多段线
Setblocktable(pl);
pl->close();
acutPrintf(_T("结束"));
}
//------------------------------------------END--------------------------------------------------------
//****************************方向判断函数******************************
static void Direction(AcDbPolyline* pl, int dir[])
{
int index = pl->numVerts(); int k = 0;
//acutPrintf(_T("index:%d\n"), index);
for (int i = 0; i < index - 2; i++)
{
AcGePoint2d p0;
pl->getPointAt(i, p0);
AcGePoint2d p1;
pl->getPointAt(i + 1, p1);
AcGePoint2d p2;
pl->getPointAt(i + 2, p2);
double v1_x = p1.x - p0.x;
double v1_y = p1.y - p0.y;
double v2_x = p2.x - p0.x;
double v2_y = p2.y - p0.y;
double cross = v1_x * v2_y - v1_y * v2_x;
const double eps = 1e-8;
if (cross > eps)
{
dir[k] = 1; //左侧
}
else if (cross < -eps)
{
dir[k] = 2; //右侧
}
//acutPrintf(_T("方向%d:%d\n"), k, dir[k]);
k++;
}
}
//**************************添加至块表函数**********************************
static void Setblocktable(AcDbPolyline* pl)
{
AcDbBlockTable* pBlockTable = NULL;
//获取这个图形数据库的块表
acdbHostApplicationServices()->workingDatabase()->getBlockTable(pBlockTable, AcDb::kForRead);
AcDbBlockTableRecord* pBlockTableRecord;
//获取块表的记录
pBlockTable->getAt(ACDB_MODEL_SPACE, pBlockTableRecord, AcDb::kForWrite);//模型空间就是一个块表记录
//创建实体,并加入到指定的块表记录中
AcDbObjectId lineId;
pBlockTableRecord->appendAcDbEntity(lineId, pl);
pBlockTable->close();
pBlockTableRecord->close();
}
//**********************绘制垂直线函数(取前进方向左侧)*************************************
static AcGePoint2d DrawPolyline_Left(AcGePoint2d ptA, AcGePoint2d ptB, double dis, AcDbPolyline* pl, int& index)
{
AcGeVector2d vecPrev = ptB - ptA;
AcGeVector2d vecNext = vecPrev.perpVector();//取逆时针,前进方向的左侧
//AcGeVector2d vecNext = vecPrev.perpVector().negate();//取顺时针
vecNext.normalize();
AcGePoint2d ptC = ptB + vecNext * dis;
//acutPrintf(TEXT("dis[0]%.6f"), dis);
pl->addVertexAt(index, ptC);
index++;
return ptC;
}
//**********************绘制垂直线函数(取前进方向右侧)*************************************
static AcGePoint2d DrawPolyline_Right(AcGePoint2d ptA, AcGePoint2d ptB, double dis, AcDbPolyline* pl, int& index)
{
AcGeVector2d vecPrev = ptB - ptA;
//AcGeVector2d vecNext = vecPrev.perpVector();//取逆时针,前进方向的左侧
AcGeVector2d vecNext = vecPrev.perpVector().negate();//取顺时针,前进方向右侧
vecNext.normalize();
AcGePoint2d ptC = ptB + vecNext * dis;
//acutPrintf(TEXT("dis[0]%.6f"), dis);
pl->addVertexAt(index, ptC);
index++;
return ptC;
}
//***********************计算两点间距离函数**********************************
static void CalDistance(AcGePoint2d pA[], int num, double dis[])
{
for (int i = 0; i < num - 1; i++)
{
dis[i] = pA[i].distanceTo(pA[i + 1]);
//acutPrintf(TEXT("dis[0]-a:%.6f\n"), dis[i]);
int a = static_cast<int>(dis[i] * 100);
if (a % 2)
{
a = a + 1;
}
dis[i] = double(a) / 100;
}
}
//***********************显示坐标函数*********************************
static void ShowCoordinates(AcGePoint2d pA[], int num)
{
for (int i = 0; i < num; i++)
{
acutPrintf(TEXT("XY%d:%g,%g\n"), i, pA[i].x, pA[i].y);
}
}
//*************************获取坐标函数**********************************
static void GetPolylineCoordinates(AcGePoint2d* pA, int& num)
{
ads_name ss;
resbuf rb;
rb.restype = 0;
rb.resval.rstring = _T("LWPOLYLINE");
rb.rbnext = NULL;
int rt = acedSSGet(_T("-b:S"), NULL, NULL, &rb, ss);
if (rt == RTNORM)
{
acutPrintf(TEXT("已选1个\n"));
ads_name entres;
acedSSName(ss, 0, entres);
AcDbObjectId ssId;
acdbGetObjectId(ssId, entres);
AcDbEntity* pEnt;
acdbOpenObject(pEnt, ssId, AcDb::kForRead);
if (pEnt->isKindOf(AcDbPolyline::desc()))
{
AcDbPolyline* pPolyline;
pPolyline = AcDbPolyline::cast(pEnt);
num = pPolyline->numVerts();
//acutPrintf(TEXT("num:%d\n"), num);
for (int j = 0; j < num; j++)
{
AcGePoint2d pt;
if (pPolyline->getPointAt(j, pt) == eOk)
{
*pA = pt;
pA += 1;
//acutPrintf(TEXT("XY:%g,%g\n"), pt.x, pt.y);
}
}
pPolyline->close();
}
pEnt->close();
acedSSFree(entres);
}
else if (rt == RTCAN)
{
acutPrintf(TEXT("取消\n"));
}
else if (rt == RTREJ)
{
acutPrintf(TEXT("输入无效\n"));
}
else
{
acutPrintf(TEXT("输入失效2\n"));
}
acedSSFree(ss);
}
//********************************end*****************************
static void ABMyGroupMyPickFirst() {
ads_name result;
int iRet = acedSSGet(ACRX_T("_I"), NULL, NULL, NULL, result);
if (iRet == RTNORM)
{
// There are selected entities
// Put your command using pickfirst set code here
}
else
{
// There are no selected entities
// Put your command code here
}
}
static void ABMyGroupMySessionCmd() {
// Put your command code here
}
static int ads_MyLispFunction() {
return (RTNORM);
}
};
//-----------------------------------------------------------------------------
IMPLEMENT_ARX_ENTRYPOINT(CArxProject4App)
ACED_ARXCOMMAND_ENTRY_AUTO(CArxProject4App, ABMyGroup, FF, FF, ACRX_CMD_MODAL, NULL)
ACED_ARXCOMMAND_ENTRY_AUTO(CArxProject4App, ABMyGroup, MyPickFirst, MyPickFirstLocal, ACRX_CMD_MODAL | ACRX_CMD_USEPICKSET, NULL)
ACED_ARXCOMMAND_ENTRY_AUTO(CArxProject4App, ABMyGroup, MySessionCmd, MySessionCmdLocal, ACRX_CMD_MODAL | ACRX_CMD_SESSION, NULL)
ACED_ADSSYMBOL_ENTRY_AUTO(CArxProject4App, MyLispFunction, false)
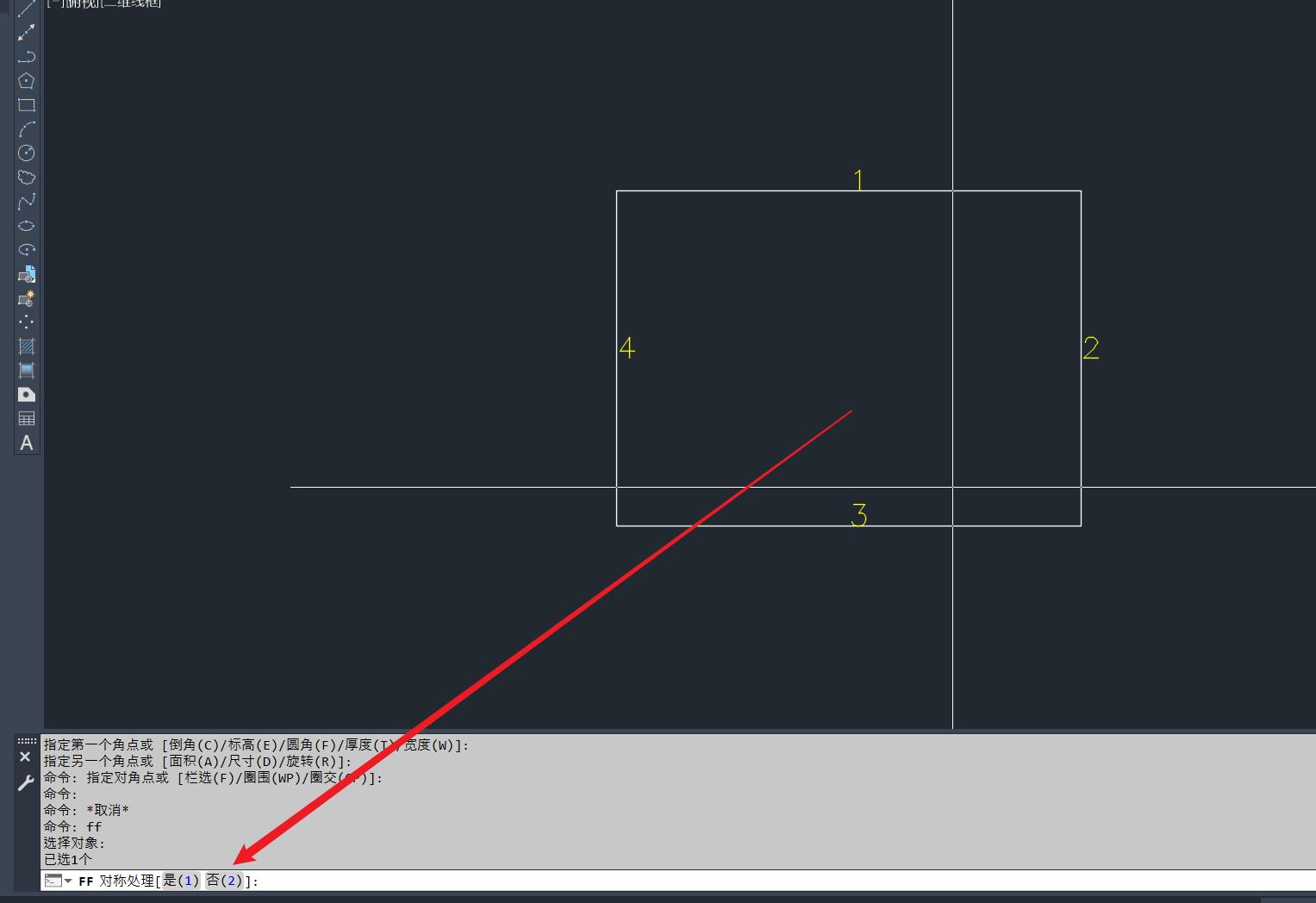
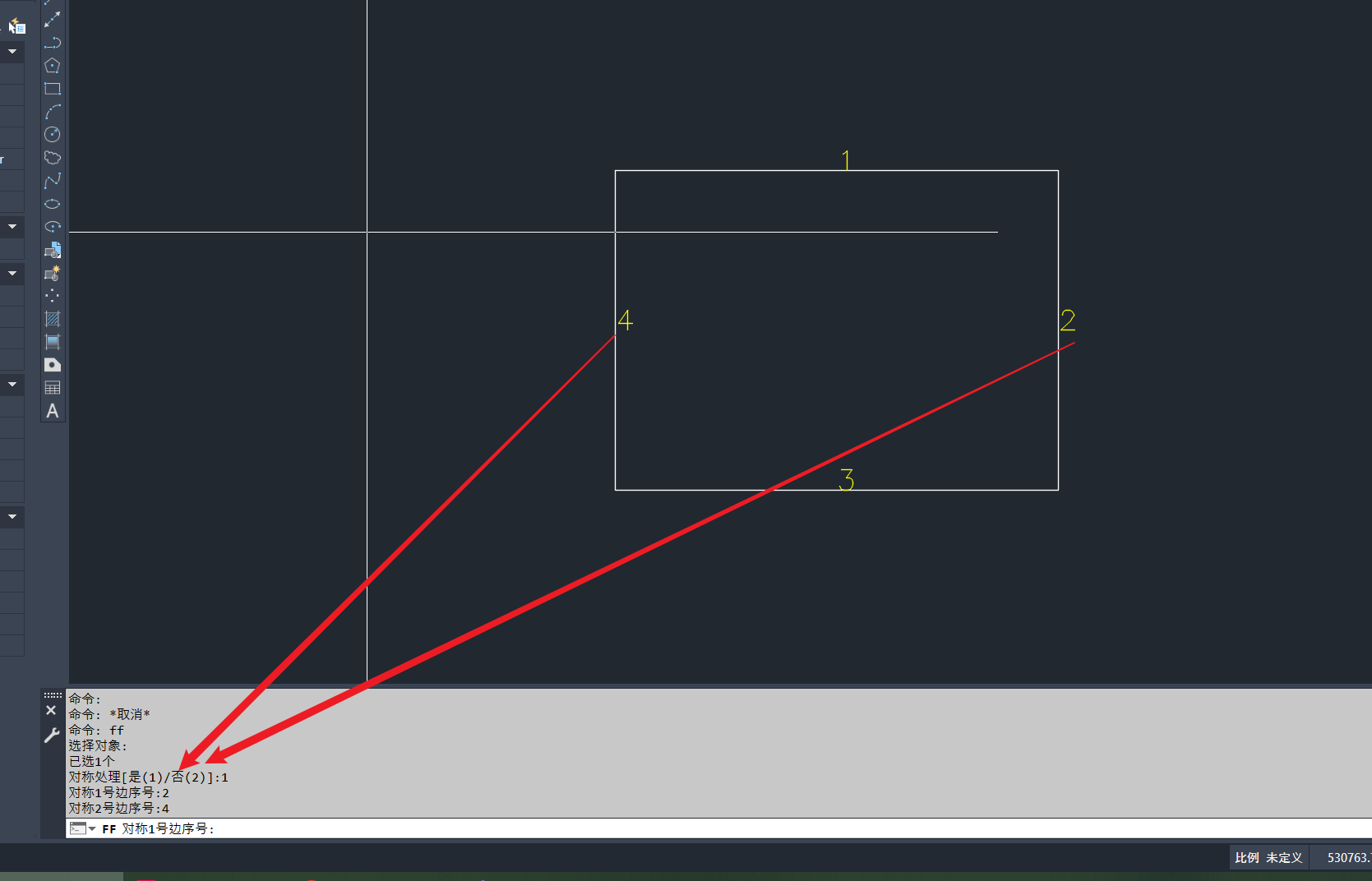
二、对称处理思路
通过在图上标记边长序号,让用户输入对称两条边的序号,由此计算两条对称边的均值,然后执行之前的代码,即可。
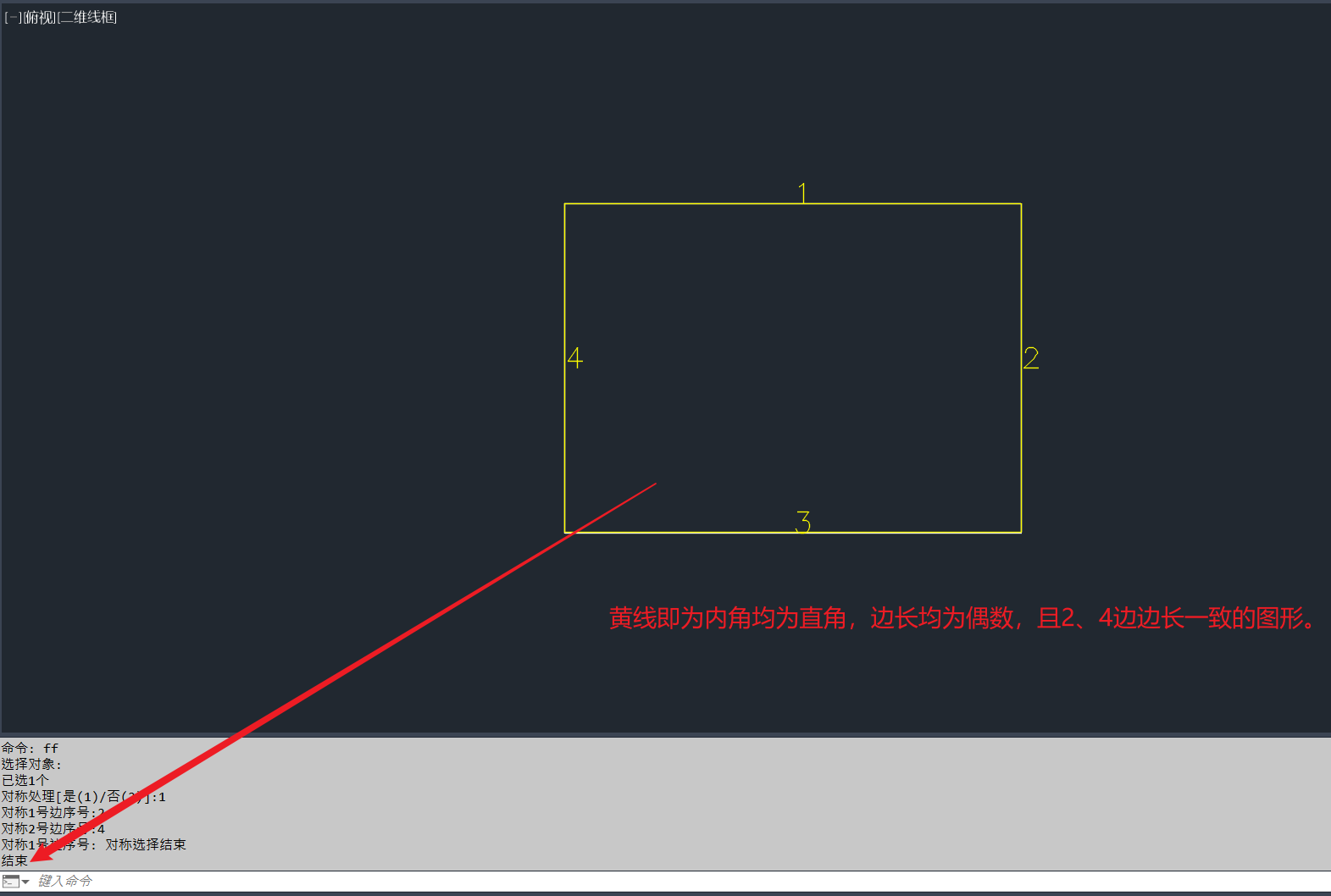
三、效果


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









