






 本文深入解析了SSD(Single Shot MultiBox Detector)算法的工作原理及其网络结构。通过VGG-16作为基础网络,并结合多个不同尺度的特征图进行目标检测,详细介绍了每个特征层的配置参数与作用。
本文深入解析了SSD(Single Shot MultiBox Detector)算法的工作原理及其网络结构。通过VGG-16作为基础网络,并结合多个不同尺度的特征图进行目标检测,详细介绍了每个特征层的配置参数与作用。
一、SSD(Single Shot MultiBox Detector)算法
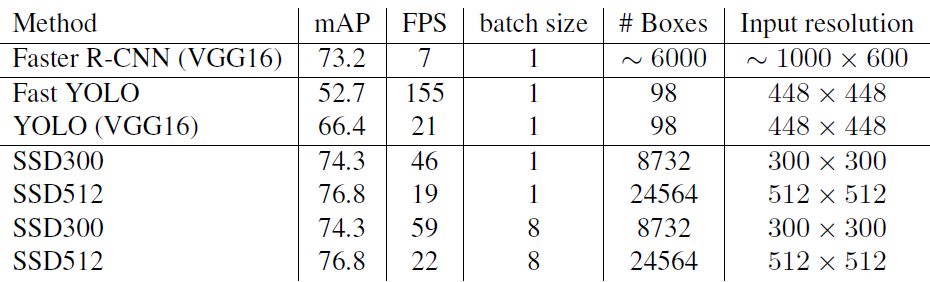
SSD算法是Faster R-CNN和YOLO的组合,因此性能方面能比两者好一些。
SSD的网络结构图:
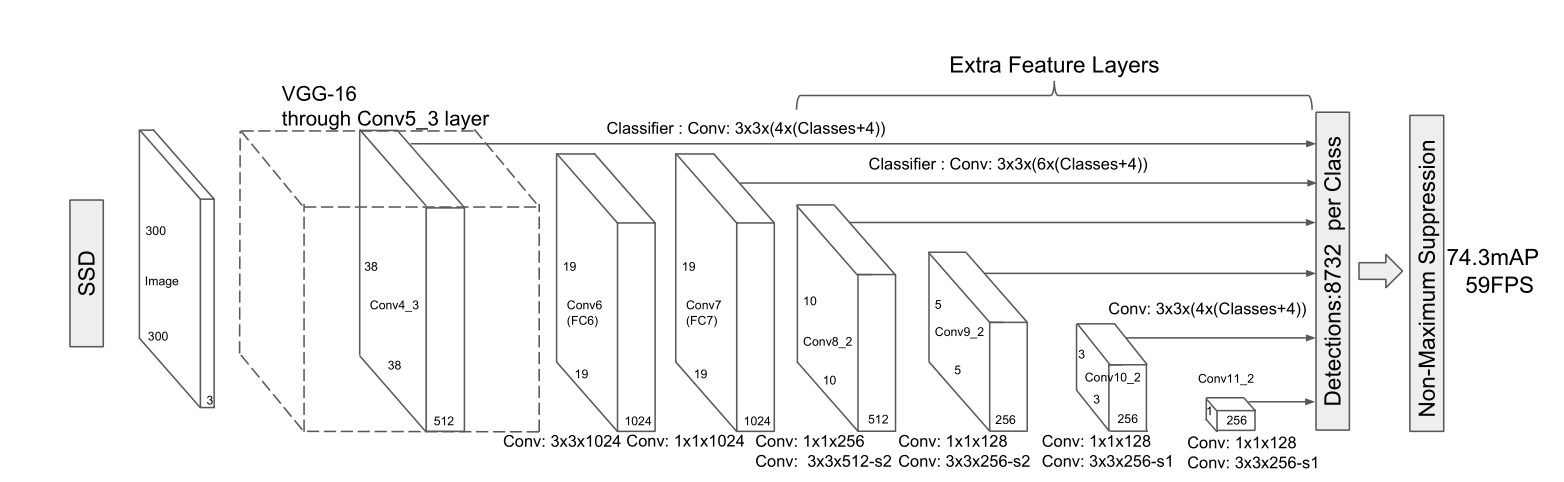
看图分析:
①首先是一个VGG-16的卷积层
其中Conv4_3层, Classifier:Conv:3*3*(4*(Classes+4))
因此这一层提取出的feature map=38*38
②接着是两个卷积层(FC6、FC7)
其中Conv6/7层, Classifier:Conv:3*3*(6*(Classes+4))
因此这一层提取出的feature map=19*19
③最后是Extra Feature Layers层
其中Conv10_2层, Classifier:Conv:3*3*(4*(Classes+4))
因此这一层提取出的feature map=3*3
在Classifier中:
Classes是识别的种类数;
加号后面的4是x,y,w,h坐标;
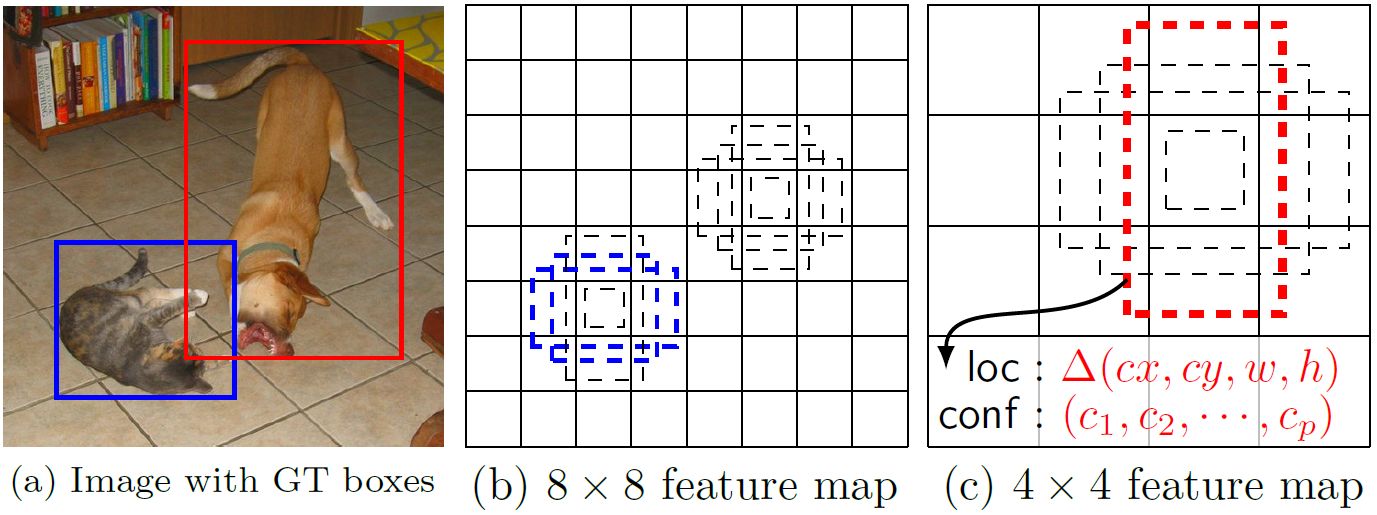
绿色的数字是指default box的数量。
4个default box 是长宽比为(1:1)、(2:1)、(1:2)、(1:1)
6个default box 是长宽比为(1:1)、(2:1)、(1:2)、(1:1)、(1:3)、(3:1)
【两个(1:1)并不是重复错误,而是公式原因】
Conv4_3 feature map:38*38————38*38*4 = 5776
Conv7 feature map:19*19————19*19*6 = 2166
Conv8_2 feature map:10*10————10*10*6 = 600
Conv9_2 feature map:5 * 5————5 *5 *6 = 150
Conv10_2 feature map:3 * 3————3 * 3 *4 = 36
Conv11_2 feature map:1 * 1————1 * 1 *4 = 4
5776+2166+600+150+36+4=8732

| Sk | 相对于图片的比例 |
| m | 一共有多少层feature map |
| k | 当前是第几层feature map |
| Smin | 第一层所占比例,在SSD300中为0.2 |
| Smax | 最后一层所占比例,在SSD300中为0.9 |
| ar | default box比例 |
默认情况下,会有一个ar=1的Sk和一个Sk',这就是两个(1:1)的原因
default box中心点坐标:
| i | 在feature map中的水平第几格 |
| j | 在feature map中的垂直第几格 |
| fk | 在第k层的feature map大小 |
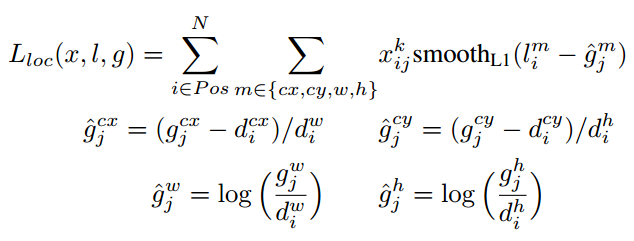
【损失函数】



















 1353
1353

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









