






 本篇博客详细介绍了如何利用PCA9685驱动板通过I2C接口与树莓派连接,实现对多个舵机的控制。首先,解释了PCA9685的引脚功能,接着讲解了如何开启树莓派的I2C接口,然后指导了硬件连接步骤,最后展示了使用adafruit_pca9685库编写代码控制舵机的方法。
本篇博客详细介绍了如何利用PCA9685驱动板通过I2C接口与树莓派连接,实现对多个舵机的控制。首先,解释了PCA9685的引脚功能,接着讲解了如何开启树莓派的I2C接口,然后指导了硬件连接步骤,最后展示了使用adafruit_pca9685库编写代码控制舵机的方法。
目录
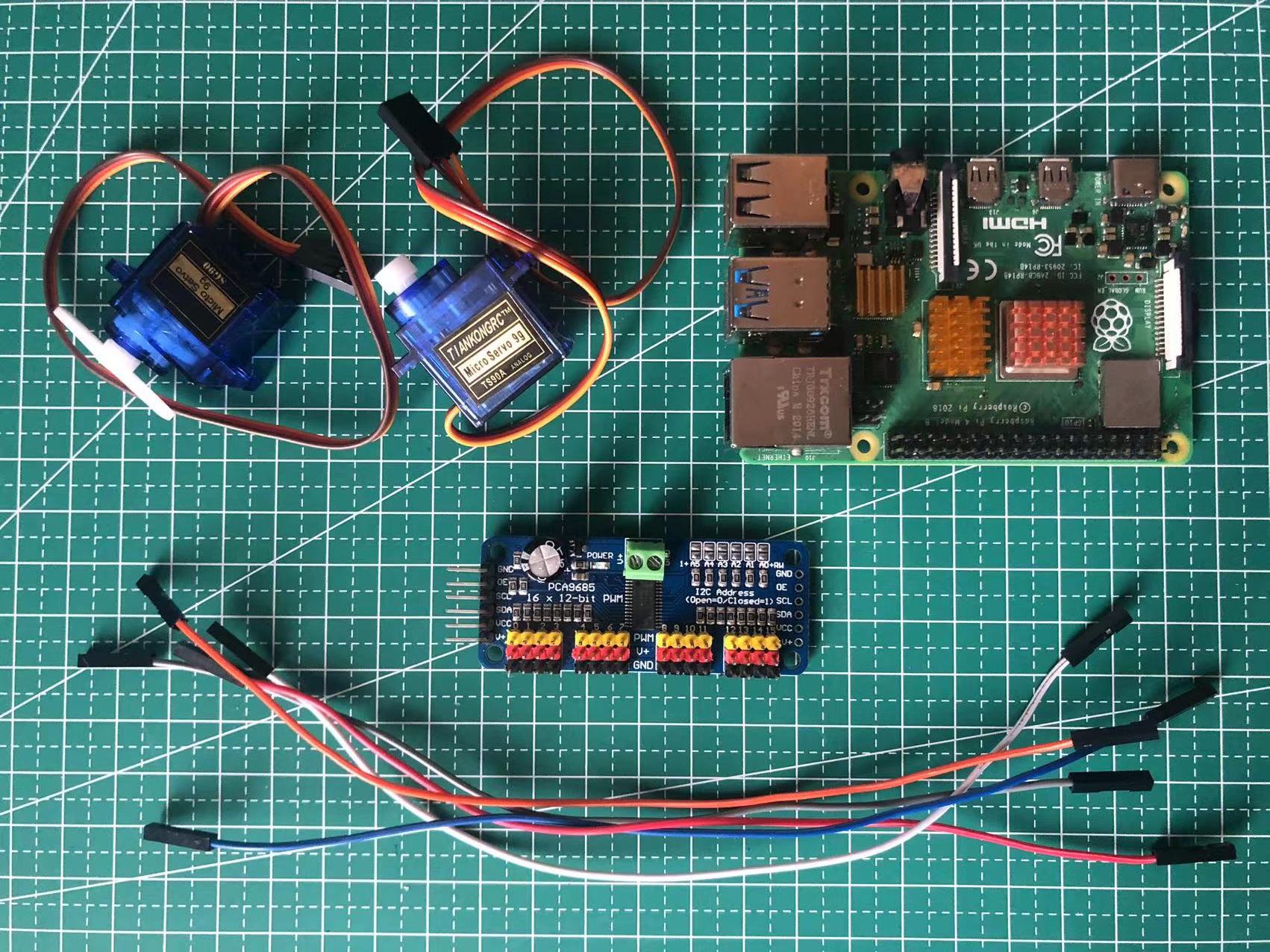
因为树莓派无法同时生成多个稳定的PWM信号,所以也就无法控制多个舵机,我们需要借助PCA9685驱动板来实现。在本节,我们将学习如何使用PCA9685驱动板来控制多个舵机。
- 树莓派 * 1
- 杜邦线若干
- 舵机* 2
- PCA9685驱动板 * 1
11.1 引脚介绍
一共有3处引脚位置需要说明,如下图所示。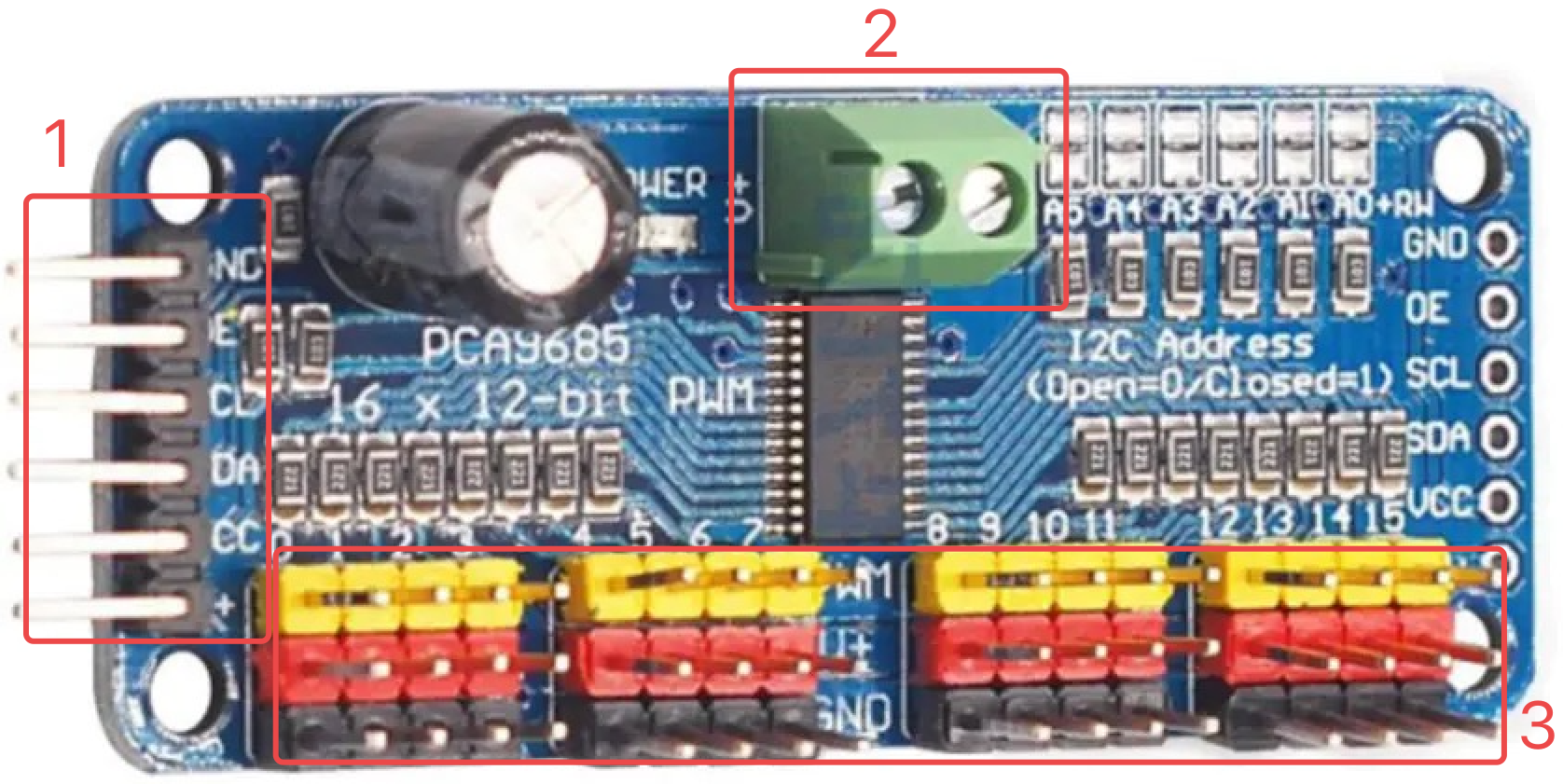
左侧1号位置引脚:
1. GND:接地引脚。
2. OE:反使能引脚,内部默认已经接地使能,所以可以不接。
3. SCL:I2C通信接口,连树莓派GPIO SCL引脚。
4. SDA:

目录
因为树莓派无法同时生成多个稳定的PWM信号,所以也就无法控制多个舵机,我们需要借助PCA9685驱动板来实现。在本节,我们将学习如何使用PCA9685驱动板来控制多个舵机。
一共有3处引脚位置需要说明,如下图所示。
左侧1号位置引脚:
1. GND:接地引脚。
2. OE:反使能引脚,内部默认已经接地使能,所以可以不接。
3. SCL:I2C通信接口,连树莓派GPIO SCL引脚。
4. SDA:
 837
1万+
837
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文

























