




 本文介绍了ROS作为机器人操作系统在Ubuntu上的应用,强调了正确版本选择的重要性。同时,详细阐述了研华RSB-3720硬件特性,包括其处理器、内存和I/O接口,并提供了从SD卡或eMMC启动系统的指导。文章还涵盖了使用Docker进行BSP环境设置和构建过程,以及在ROS中启动摄像头和SLAM演示的步骤,展示了RSB-3720在ROS开发中的适用性。
本文介绍了ROS作为机器人操作系统在Ubuntu上的应用,强调了正确版本选择的重要性。同时,详细阐述了研华RSB-3720硬件特性,包括其处理器、内存和I/O接口,并提供了从SD卡或eMMC启动系统的指导。文章还涵盖了使用Docker进行BSP环境设置和构建过程,以及在ROS中启动摄像头和SLAM演示的步骤,展示了RSB-3720在ROS开发中的适用性。
一.ROS介绍
ROS是一组可以帮助我们建立机器人应用的软体库和实例,ROS版本的发布依托于Ubuntu版本。ROS发行版是一组有版本的ROS包。这些类似于Linux发行版(例如Ubuntu),并主要是在Ubuntu上测试的。因此,它在特定Ubuntu版本做了充足的测试。用户可以在任何基于unix的平台上安装和运行ROS。
用户可能会在集成某些解决方案时可能会出现问题。这些问题通常与兼容性或某些库中缺乏兼容版本有关。确保成功的最佳方法是使用正确的Ubuntu版本,如ROS和ROS2发行版所推荐的,或者使用在硬件供应商提供的特定硬件和产品上经过全面测试的ROS。这两种方法都能确保ROS基础设施平稳运行。
二.研华RSB-3720介绍
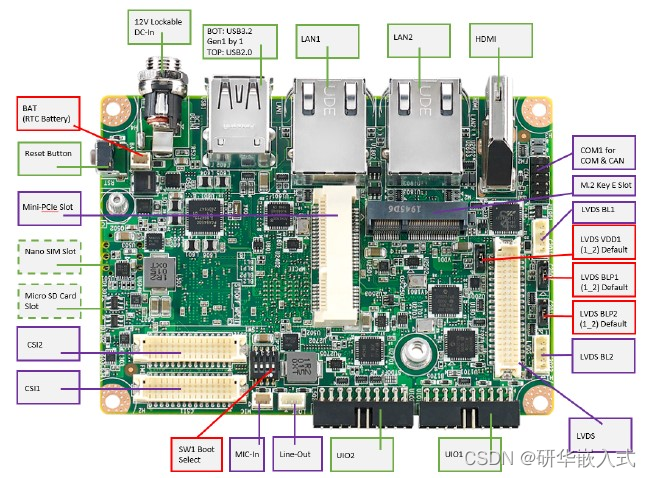
RSB-3720硬件介绍:
NXP Arm® Cortex®-A53 i.MX8M Plus Quad/Dual,高达1.8 GHz
板载LPDDR4 4 GB / 6 GB, 4000MT/s内存
支持1路HDMI 1920x1080 60Hz, 一个单通道或一个双通道 24 位LVDS (或BOM可选 1个4通道MIPI-DSI)
支持1个4线RS-232/422/485, 1个USB3.2 Gen1 By 1, 1个USB2.0, 1个Micro SD, 1个麦克风输入/输出
一个为3G/4G提供信号的mini-PCIe, 1个M.2 2230 Key E 插槽
支持Yocto Linux 和 Android
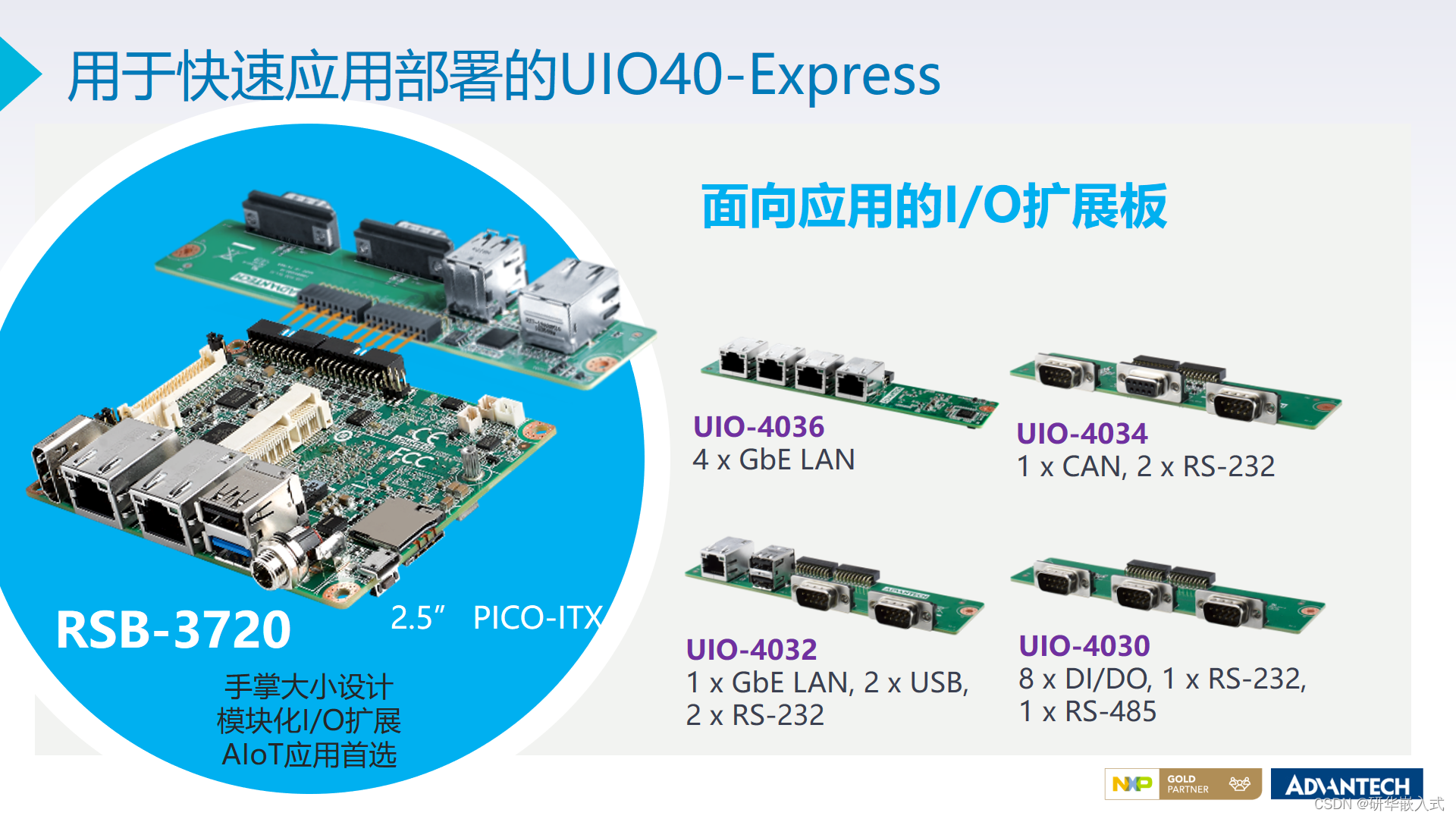
研华RSB-3720支持 I/O 扩展板UIO40-Express, UI/O扩展能够满足不同垂直行业的应用。
三.用eMMC或SD卡启动系统
使用RSB-3720引导操作系统有两种方法。第一种是从SD卡引导,第二种是通过eMMC引导。进行ROS开发评估的用户可能会发现,当从构建服务器或PC上刷新固件时,使用SD卡更容易。
Boot Strap | SW1-1 | SW1-2 | SW1-3 | SW1-4 |
eMMC | OFF | ON | OFF | OFF |
SD | ON | ON | OFF | OFF |
A. SD 启动

B. eMMC 启动

C. 调试端口连接及测试
RSB-3720调试接口与COM1共用。请先连接调试console线,然后将usb - rs232电缆连接到您的PC终端。连接线缆到COM1引脚头旁边的HDMI连接器。RSB-3720可以通过串口线缆与主机服务器通信。可使用常用的串口通信程序,如HyperTerminal、Tera Term、PuTTY等。请设置波特率为115200。
四.BSP环境设置和构建说明
研华将搭建环境和镜像所需的流程简化为3个步骤:
1. 访问我们的AIM-Linux开发中心,选择基于silicon平台的相关BSP
2. 按照“One Step Build Image”方法下载脚本
3. 将构建映像闪存到SD卡,并从SD卡启动它
这种方法减少了工程师在环境设置期间所需的工作量,并帮助他们解决出现的问题。这个任务只需要用户在云中有一个本地PC或虚拟机——所有其他必要的元素都可以在互联网上找到。用户应该使用功能强大的PC或带有SSD的虚拟机来加快进程。同样,如果用户可以访问Azure VM服务,他们可以通过PC或笔记本电脑,使用存储在本地SD卡上的闪存镜像在云中完成任务。我们将在本教程后面详细说明如何在Linux和Windows上使用这些工具。
主机中的Docker设置
用户可以在Azure Cloud Service或本地构建机中使用Ubuntu系统设置虚拟机。
Docker安装说明
A .在构建机器上准备容器环境。操作系统请选择Ubuntu 18.04。
A-1更新APT包索引并且安装包允许APT通过HTTPS使用存储库:
$sudo apt-get update
$sudo apt-get install \
ca-certificates \
curl \
gnupg \
lsb-releaseA-2 加Docker的官方GPC密匙
$ curl -fsSL https://download.docker.com/linux/ubuntu/gpg | sudo gpg --dearmor -o /usr/share/keyrings/docker-archive-keyring.gpgA-3建立稳固的存储库,安装docker引擎。
$ echo \
"deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/docker-archive-keyring.gpg] https://download.docker.com/linux/ubuntu \
$(lsb_release -cs) stable" | sudo tee /etc/apt/sources.list.d/docker.list > /dev/null
$ sudo apt-get update
$ sudo apt-get install docker-ce docker-ce-cli containerd.ioB.使用研华制作的docker镜像(源于docerhub)
$ docker pull advrisc/u18.04-imx8lbv1
$ export CONTAINER_NAME=rsb-3720
$ mkdir adv-release-bsp
$ export WORKSPACE=~/adv-release-bsp
$ docker run --privileged -it --name ${CONTAINER_NAME} -v ${WORKSPACE}:/home/adv/adv-release-bsp -v /dev:/dev advrisc/u18.04-imx8lbv1 /bin/bash五.构建指南
进入docker容器环境外壳时,需要执行以下操作:5.1 准备包括ROS meta layer的BSP
5.1制备BSP,加入ROS元层
# update CA certificates
$ sudo apt-get install apt-transport-https ca-certificates -y
$ sudo update-ca-certificates
$ export GIT_SSL_NO_VERIFY=1
$ repo init -u https://dev.azure.com/advcharles/IMX-Robot/_git/adv-arm-yocto-bsp -b imx-linux-zeus -m imx8LBVA0271_robot.xml
$ repo sync
$ ln -s sources/meta-robot-platform/imx/meta-robot/tools/setup-imx-robot.sh setup-imx-robot.sh可以看到机器人平台已经包含在 BSP 中,然后你可以开始用你需要的ROS版本搭建你自己的机器人固件。例如,你可以选择 ros1melodic或kinetic或 ROS2 foxy。
$ DISTRO=imx-robot-xwayland MACHINE=imx8mprsb3720a1 source setup-imx-robot.sh -r melodic -b imx8mprsb3720a1-robot-melodic
$ bitbake imx-robot-system
$ DISTRO=imx-robot-xwayland MACHINE=imx8mprsb3720a1 source setup-imx-robot.sh -r kinetic -b imx8mprsb3720a1-robot-kinetic
$ bitbake imx-robot-system
$ DISTRO=imx-robot-xwayland MACHINE=imx8mprsb3720a1 source setup-imx-robot.sh -r foxy -b imx8mprsb3720a1-robot-foxy
$ bitbake imx-robot-system5.2 刷镜像和扩展 rootfs 空间
请刷镜像到你的主机电脑或笔记本。
$ scp charles@desktop:~/adv-release-bsp/imx8mprsb3720a1-robot-melodic/tmp/deploy/images/imx8mprsb3720a1/imx-robot-system-melodic-imx8mprsb3720a1-20220309072100.rootfs.wic.bz2 .A. Linux
选择您的 udisk 名称来替换/dev/sdx,就像/dev/sdc 一样,但是您应该注意不要使用系统磁盘或者重要的存储磁盘
$ sudo dd if=./imx-robot-system-melodic-imx8mprsb3720a1-20220309072100.rootfs.wic.bz2 of=/dev/sdxB. Windows
用户可以选择 balenaEtcher将映像flash到他们的Windows操作系统。或者,他们也可以选择Linux版本1。Linux版本1的图形界面操作与Windows版本类似。

5.3 【技巧和方法】当遇到设置Nxp8987 SDK support和source mirror失败
A.请在你的构建文件夹的 local.conf 文件中加 MACHINE_FEATURES_remove = " nxp8987 "和移除source mirror 以防止构建失败
B.通过添加 IMAGE _ install _ append = “ orb-slam2”来使用 slam demo,请将 orb-slam2包含到图像中
C.如果需要预留磁盘空间,可以在构建文件夹的 local.conf 文件中添加 INHERIT + = “ rm _ work”特性。
六.在ROS中启动摄像头(仅支持USB摄像头-目前不支持MIPI摄像头)
ROS1仍然是机器人应用的热门选择。因此,我们将演示ROS1的使用。我们在这个教学中使用的版本是基于螺旋分布。我们将演示如何启动USB摄像头节点。本演示还将在您的HDMI显示器上显示相机预览-这是一个ROS节点。
$ source /opt/ros/melodic/setup.bash
$ roscore&
$ roslaunch usb_cam usb_cam-test.launch七.SLAM演示
你可以在下面的链接看到必要的材料
$ mono_euroc/orb-slam2/Vocabulary/ORBvoc.txt
ORB_SLAM2/Examples/Monocular/EuRoC.yaml mav0/cam0/data ORB_SLAM2/Examples/Monocular/EuRoC_TimeStamps/MH01.txt
八.结论
熟悉ROS开发的用户会发现ROS在Ubuntu系统中集成得很好。这是因为ROS被广泛用于在Ubuntu x86架构上开发机器人解决方案。相反,基于arm的平台通常默认提供嵌入式Linux(如Yocto OS),由于嵌入式Linux以提供一个框架而闻名,使终端用户能够从构建块设计自己的操作系统,因此使用ROS平台安装和开发更加困难。研华的BSP与ROS完全集成。ROS开发人员可以专注于开发ROS应用,并致力于设计低功耗的机器人解决方案,而不会产生冲突和混乱。这将进一步帮助降低基于Arm平台的开发成本和相关的麻烦。


















 71
71

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









