




 本文详细介绍了基于STM32的超声波避障智能小车的设计,包括电机驱动选型(L298N、L9110、DRV8833、TB6612)、系统硬件设计(电机驱动、舵机云台、超声波模块)、软件设计(电机速度控制、舵机控制、超声波测距)以及实物展示。通过STM32控制TB6612驱动电机,使用超声波模块和舵机实现避障功能,提供完整的原理图和代码示例。
本文详细介绍了基于STM32的超声波避障智能小车的设计,包括电机驱动选型(L298N、L9110、DRV8833、TB6612)、系统硬件设计(电机驱动、舵机云台、超声波模块)、软件设计(电机速度控制、舵机控制、超声波测距)以及实物展示。通过STM32控制TB6612驱动电机,使用超声波模块和舵机实现避障功能,提供完整的原理图和代码示例。
目录
单片机智能小车一直是大家很喜欢的小设计,智能小车的制作虽然难度不高,但是对于初学者来说,由于陌生,因此也总是觉得门槛高。事实上,很多东西都禁不起深挖,当你做完之后才会发现,原来也不过如此。
我计划在接下来的一段时间里,断断续续地给大家带来智能小车的相关设计,由易到难。涉及蓝牙控、WIFI控、NRF24L01控制,红外遥控控制,红外、超声波避障、寻迹等。每一篇都是一个完整的设计,有着完整的软硬件分析过程,希望可以给你帮助。
本节将制作一个超声波避障的小车。
一、原理简述
作为智能小车,最基本的一点肯定是解决电机驱动的问题。
现在市场上有许多适合小车电机驱动的模块,常见的有L298N、L9110S、DRV8833、TB6612等。这些芯片/模块各有优劣,但是控制原理和方法基本相似。这些芯片/模块的详细介绍可以参照第二章系统硬件设计,将详细地介绍上述几个芯片/模块的重要参数以及使用方法。
电机驱动解决后,接下来就是超声波模块。超声波配合舵机,可以轻松实现避障,使得小车看上去更加智能。
本设计主将以stm32为核心,配合电机驱动、舵机和超声波模块,实现小车的自动避障功能。
二、系统硬件设计
1.电机驱动选型
1.1 L298N
工作电压:2.5~46V,
单通道最大输出电流:2A,
逻辑电源(Vss):4.5~7V,
低电平输入范围:-0.3~1.5V,
高电平输入范围:2.3~Vss,
可驱动两路电机。
应用电路图:
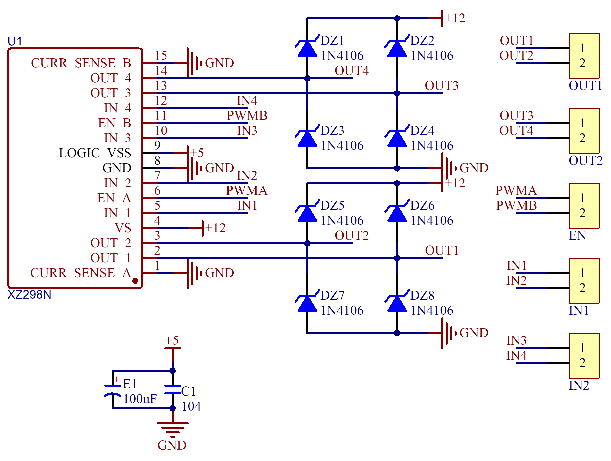
上述应用电路为参考电路,VS和VSS都可以使用5V(不建议使用3.3V),IN输入以及PWM可以使用5V或者3.3V单片机,注意PCB板布线适当加粗,且供电电池保持充足电量。
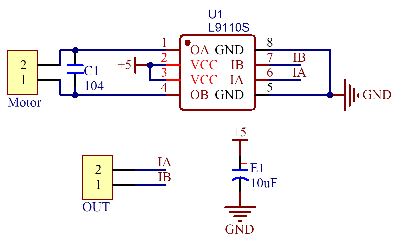
1.2 L9110
工作电压:2.5V~12V,
连续电流输出能力:DIP8 1.0A(8V)
SOP8 0.8A(8V),
输入高电平:2.5V~10V
输入低电平:<0.7V,
单路输出。
真值表:

应用电路图:
1.3 DRV8833
输入电压:2.7V~10.8V,
输出电流(VM = 5V,25°C 时),
– 采用 PWP/RTY 封装:每条 H 桥的 RMS 电流为 1.5A,峰值电流为 2A;
– 采用 PW 封装:每条 H 桥的 RMS 电流为500mA,峰值电流为 2A;
• 可以将输出并联,以实现
– 3A RMS 电流、4A 峰值电流(PWP 和 RTY 封装);
– 1A RMS 电流、4A 峰值电流(PW 封装);
可驱动两路电机。
应用电路图:
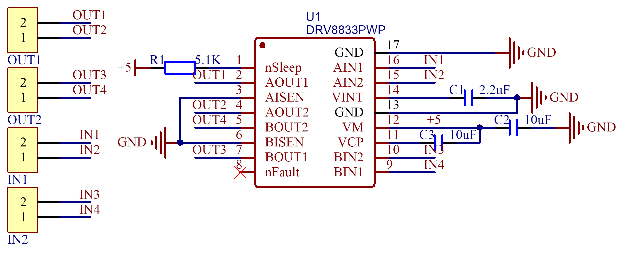
上述应用电路为参考电路,IN输入以及PWM可以使用5V或者3.3V单片机,注意PCB板布线适当加粗,且供电电池保持充足电量。
1.4 TB6612
输入电压:
VCC:2.7~5.5V 芯片小信号电源
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











