



 本文围绕神经网络与深度学习课程,详细介绍了评价指标如精确率、召回率和精度,以及混淆矩阵的应用。通过实例探讨了P-R曲线的概念,并讨论了目标检测问题的发展历程,重点提到了YOLO算法。
本文围绕神经网络与深度学习课程,详细介绍了评价指标如精确率、召回率和精度,以及混淆矩阵的应用。通过实例探讨了P-R曲线的概念,并讨论了目标检测问题的发展历程,重点提到了YOLO算法。
前言
关于课程《神经网络与深度学习》所做笔记。
本次为第3次作业。
本周课程内容
评价指标
相关概念:
1. TP:被正确地划分为正例的个数,即实际为正例且被分类器划分为正例的实例数
2. FP:被错误地划分为正例的个数,即实际为负例但被分类器划分为正例的实例数
3. FN:被错误地划分为负例的个数,即实际为正例但被分类器划分为负例的实例数
4. TN:被正确地划分为负例的个数,即实际为负例且被分类器划分为负例的实例数
混淆矩阵:
P(精确率):TP/(TP+PS)TP/(TP+PS)TP/(TP+PS) ,标识“挑剔”的程度
R(召回率):TP/(TP+FN)TP/(TP+FN)TP/(TP+FN)。召回率越高,准确度越低,标识“通过”的程度
精度( Accuracy):(TP+TN)/(TP+FP+TN+FN)(TP+TN)/(TP+FP+TN+FN)(TP+TN)/(TP+FP+TN+FN)
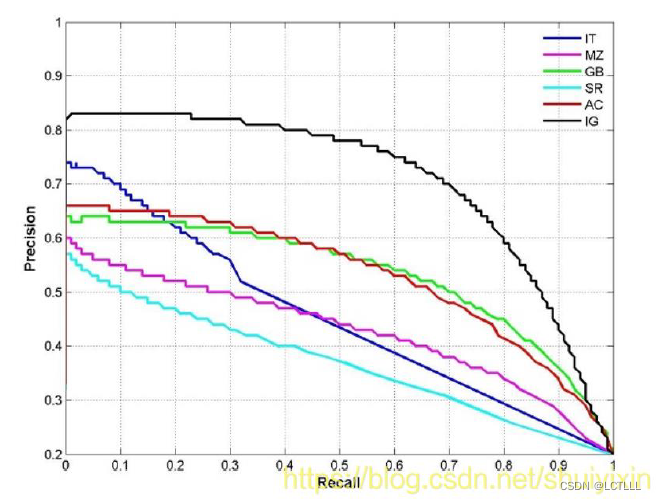
P-R曲线:
PR 的关系曲线图,表示了召回率和准确率之间的关系,精度准确率 越高 召回率越低。
示例
假设一个测试集,其中图片只由大雁和飞机两种图片组成
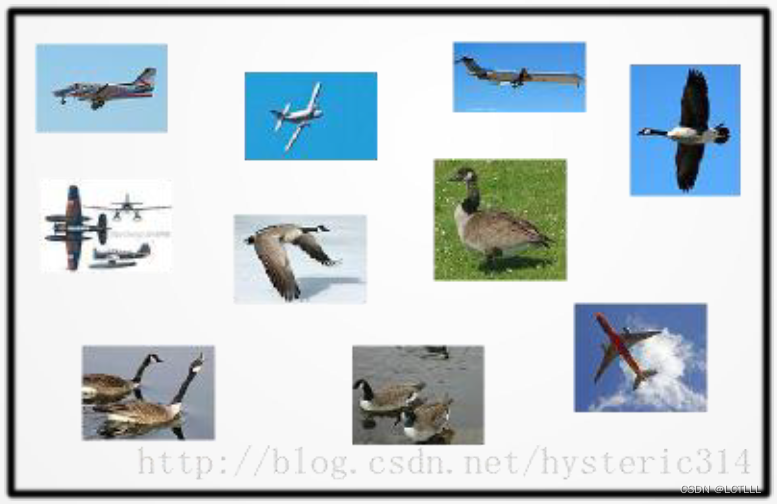
1. True positives : 飞机的图片被正确的识别成了飞机;
2. False positives: 大雁的图片被错误地识别成了飞机;
3. False negatives: 飞机的图片没有被识别出来,系统错误地认为它们是大雁;
4. True negatives: 大雁的图片没有被识别出来,系统正确地认为它们是大雁。
假设由CNN得到飞机分类结果如下
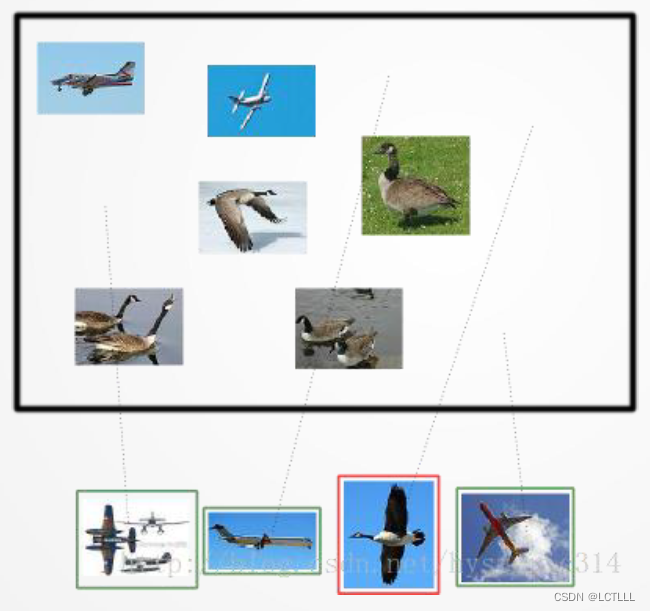
分类为飞机正样本 的四张照片中:
1.True positives : 有三个,画绿色框的飞机。2.False positives: 有一个,画红色框的大雁。分类为大雁 负样本 的四张照片中:3.True negatives : 有四个,这四个大雁的图片,系统正确地没有把它们识别成飞机。4.False negatives: 有两个,两个飞机没有被识别出来,系统错误地认为它们是大雁。
置信度与准确率
调整阈值可改变准确率或召回值
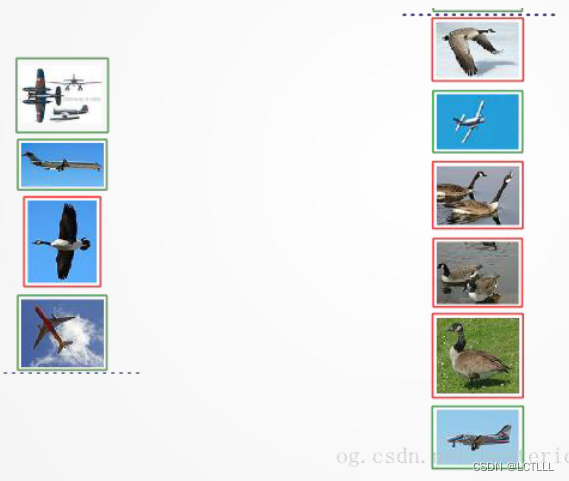
在刚才例子中,对应某阈值,前四个样本左侧被分类为飞机,改变阈值会改变划分,进一步影响准确率或召回值。
可以通过改变阈值(也可以看作上下移动蓝色的虚线),来选择让系统识别能出多少个图片,当然阈值的变化会导致Precision与Recall值发生变化 。比如,把蓝色虚线放到第一张图片下面,也就是说让系统只识别出最上面的那张飞机图片,那么 Precision 的值就是100%,而 Recall 的值则是20%。如果把蓝色虚线放到第二张图片下面,也就是说让系统只识别出最上面的前两张图片,那么Precision的值还是100%而Recall的值则增长到是40%。
目标检测问题
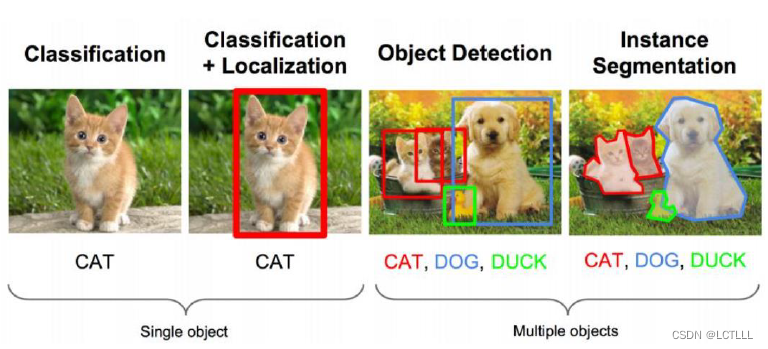
目标检测
目标检测是在给定的图片中精确找到物体所在位置,并标注出物体的类别。物体的尺寸变化范围很大,摆放物体的角度,姿态不定,而且可以出现在图片的任何地方,并且物体还可以是多个类别。
目标检测问题发展
1.R-CNN
2.SPP NET
3.Fast R-CNN
4.Faster R-CNN
5.最终实现 YOLO
YOLO是一个集大成的方法,不了解之前的方法,很难掌握 YOLO 的思路。

















 852
852

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









