






控制旋转角度达270度的舵机是一种实用的技术伟创动力,这种技术可以在多种场景中使用。接下来,我会逐一为大家介绍操作舵机时需要注意的技巧和关键点。
舵机基本类型
舵机的种类丰富多样,涵盖了高性能无刷舵机、高压空心杯舵机以及智能机器人舵机等多种类型。其中,高性能无刷舵机动力强劲,特别适合在性能要求较高的环境中运用;而高压空心杯舵机则反应迅速,能量转换效率也相当不错。在不同的应用领域,各种舵机都能充分发挥各自的长处。以智能机器人舵机为例,它在操控机器人关节这一环节上表现优异,起着至关重要的作用。
扭矩的选择
舵机的扭矩范围相当广泛,涵盖了从0至2kg的扭矩,甚至超过了40kg的扭矩。对于负载较轻的设备舵机厂家伟创动力舵机品牌伟创动力,例如小型,选择扭矩在0至2kg之间的舵机即可,这样既能够满足使用需求,又避免了资源的浪费。若遇到大型设备,特别是工业自动化领域的一些设备,那我们得选用扭矩超过40kg的舵机,因为扭矩较小的舵机根本无法驱动这些设备。只有选对了扭矩,舵机才能在工作时保持稳定运行。
角度范围意义
舵机的可调节角度种类十分丰富,尤其在0至270度的范围内,其灵活性显得格外显著。在机器人手臂挥动、摄像头转动等场合,若需要较大范围的转动,270度的舵机就能提供更广阔的活动空间。与角度较小的舵机相比,实用性显著提升。这使设备的动作变得更加丰富,并能实现更多功能。
电压的要求
舵机的电压等级有若干种,具体包括4.8伏到7.4伏、8.4伏到12伏、12伏到24伏,还有24伏以上的。这些不同的电压等级使得舵机能够应对各种不同的供电需求。
小型电子设备通常配备4.8至7.4伏特的舵机,这样的配置便于使用电池供电,满足了小型设备对电源便捷性的需求;而大型工业设备可能需要24伏特以上的高压舵机,这样才能确保有足够的动力来驱动设备的运行。电压选择得当,不仅能让舵机正常工作,还能保障整个系统的稳定运行。
通信协议特点
通信协议涵盖了PWM、RS485串口、TTL串口、CAN总线等多种类型。PWM协议因其操作简单、应用广泛而受到青睐,许多控制舵机的案例都选择了它,使用起来非常容易。RS485串口和CAN总线则适合于长距离和多节点通信,在众多大型控制系统中的应用较为普遍。不同的通信协议具有各自的特点,选择时需根据具体需求来定。
实际应用案例
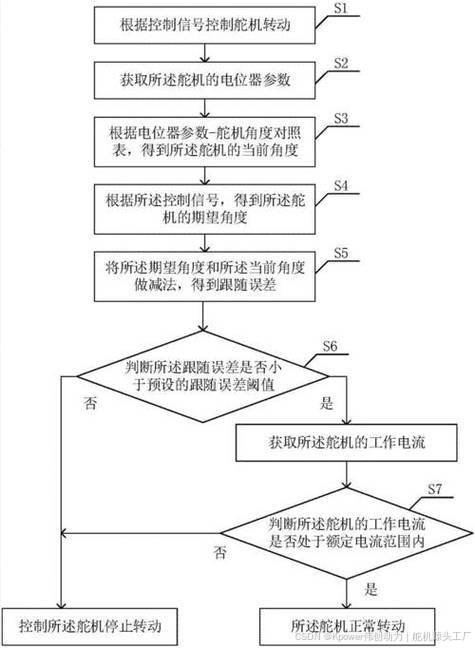
在制作环节,操控的舵机可达270度,这使得动作更加逼真。比如,在仿人机器人的制作中,通过舵机对关节的精准控制,机器人能够实现各种动作。此外,在工业自动化领域,舵机被用来对设备进行精确定位和操作,有效提高了生产效率。这些应用案例充分展示了控制270度舵机的实用价值。
操控与270度舵机结合时,许多人都会觉得哪个步骤特别困难?如果这篇文章对您有所启发,不妨点个赞,或者分享给更多的人!


















 198
198

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









