




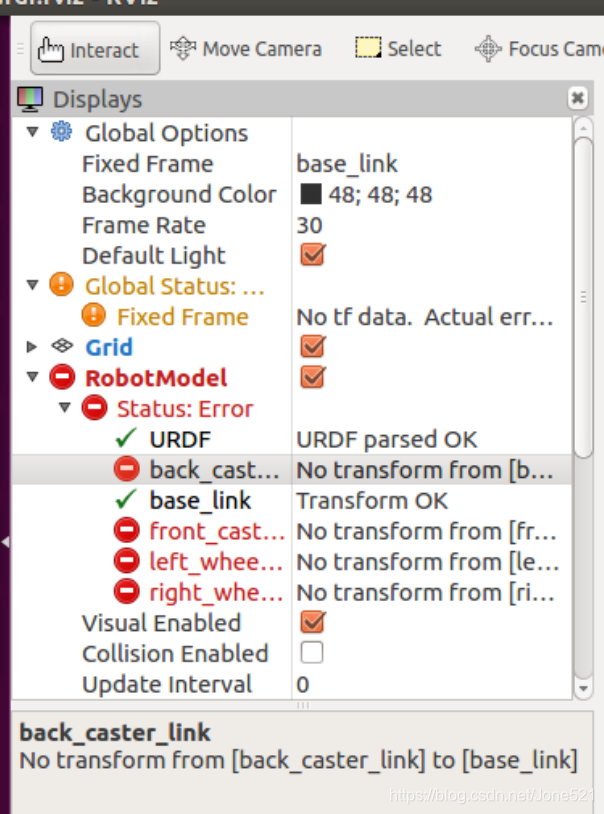
一,运行Rviz时,RobotModle Status:Error 所有的模型提示详细信息都是 No transform from[xxx] to [base_link],如下图,
网上查了一下有说需要安装unicode,安装一下,
sudo apt-get install unicode
需要重启ros.测试验证,问题解决
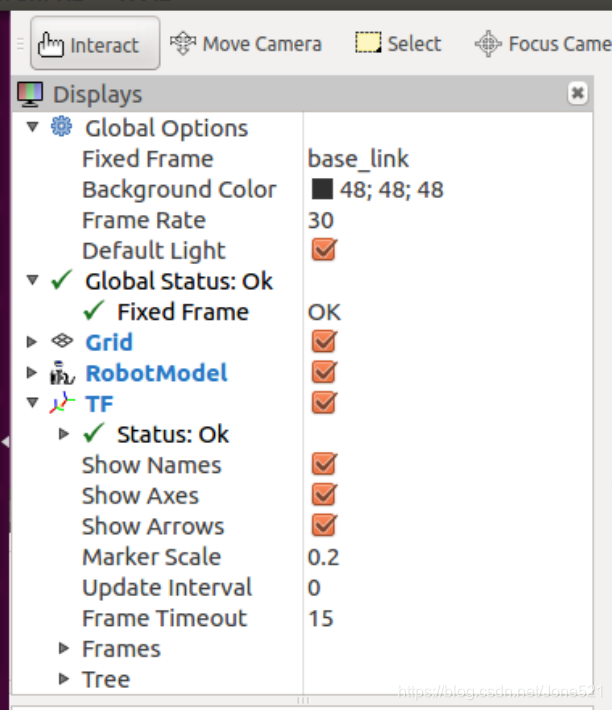
 本文介绍了解决在使用RViz时遇到的“Notransformfrom[xxx]to[base_link]”错误的方法。通过安装unicode并重启ROS,成功解决了模型无法正确显示的问题。
本文介绍了解决在使用RViz时遇到的“Notransformfrom[xxx]to[base_link]”错误的方法。通过安装unicode并重启ROS,成功解决了模型无法正确显示的问题。
一,运行Rviz时,RobotModle Status:Error 所有的模型提示详细信息都是 No transform from[xxx] to [base_link],如下图,
网上查了一下有说需要安装unicode,安装一下,
sudo apt-get install unicode
需要重启ros.测试验证,问题解决
 3022
3040
1662
3022
3040
1662

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























