



 文章介绍了如何在ESP-IDF环境中利用CMake配置文件管理组件,包括自动识别components目录,通过file(GLOB_RECURSE)收集源文件,以及跨文件夹调用函数。在test1中调用test2的函数,并在main函数中调用test1,最后编译并下载程序以验证效果。
文章介绍了如何在ESP-IDF环境中利用CMake配置文件管理组件,包括自动识别components目录,通过file(GLOB_RECURSE)收集源文件,以及跨文件夹调用函数。在test1中调用test2的函数,并在main函数中调用test1,最后编译并下载程序以验证效果。
从ESP-IDF插件上导出一个hello_world例程
在这个目录下的CMake文件里
include($ENV{IDF_PATH}/tools/cmake/project.cmake)
這行代碼对本工程下的 components 文件夹包含,自动识别components目录下的二级目录里的CMakeLists文件
这里打开components中,test1文件夹中的CMakeLine文件
第一行file(GLOB_RECURSE SOURCES ./*.c)可以识别本文件夹(test)里的所有.c文件
REQUIRES 后面增加test2,就可以调用test2里的头文件
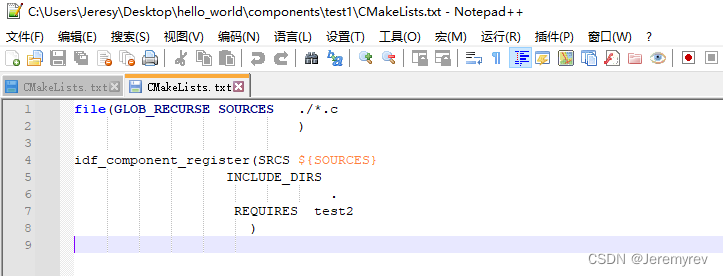
如果在test文件夹下再添加一个文件夹(test1_1),只需要在后面加上对应的文件名称即可
file(GLOB_RECURSE SOURCES ./*.c
./test1_1/*.c)
接下来,在test1中调用test2函数,并在main函数里调用test1函数
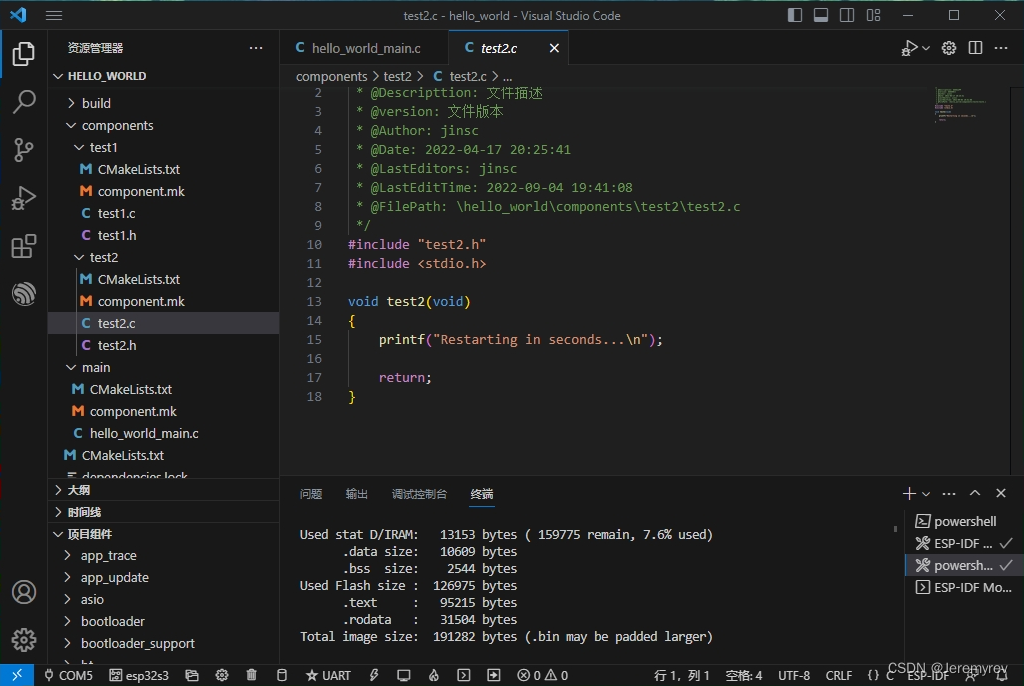
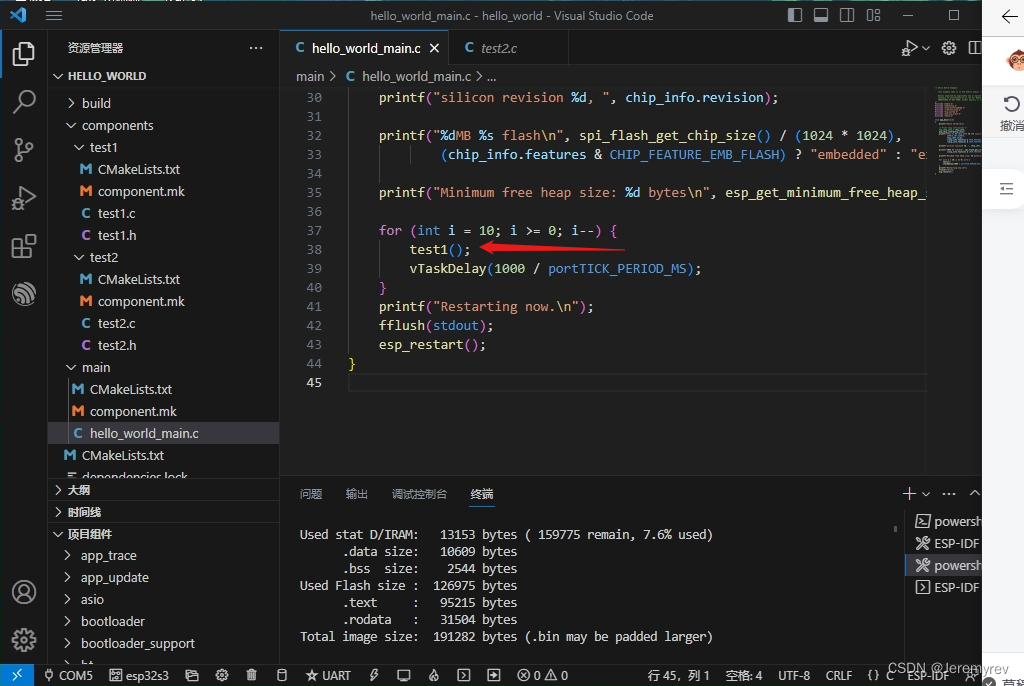
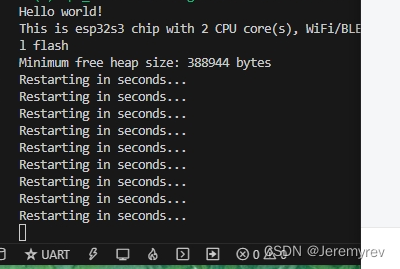
编译下载,看一下效果


















 535
535



 到【灌水乐园】发言
到【灌水乐园】发言








