




 本文介绍了图像复原中的两种主要频域方法:逆滤波通过点扩散函数和噪声模型进行恢复,而维纳滤波则基于随机过程理论设计滤波器以最小化均方误差。实验部分展示了如何在Python中运用这些技术处理模糊图像和噪声,以及它们与均值滤波的对比结果。
本文介绍了图像复原中的两种主要频域方法:逆滤波通过点扩散函数和噪声模型进行恢复,而维纳滤波则基于随机过程理论设计滤波器以最小化均方误差。实验部分展示了如何在Python中运用这些技术处理模糊图像和噪声,以及它们与均值滤波的对比结果。
图像复原的基本原理
图像的复原就是要尽可能恢复退化图像的本来⾯⽬,它是沿图像降质的逆向过程进⾏。典型的图像复原是根据图像退化的先验知识建⽴⼀个退化模型,以此模型为础,采⽤各种逆退化处理⽅法进⾏恢复,使图像质量得到改善
频域常用的图像恢复方法有哪两种?简述他们的处理方法和步骤。
频域常⽤的图像恢复⽅法有逆滤波和维纳滤波。
逆滤波
逆滤波是最早使⽤的⼀种⽆约束复原⽅法
在图像复原中,给定g(x,y)g(x,y)g(x,y) 和关于退化函数HHH 的⼀些知识以及外加噪声项η(x,y)\eta(x,y)η(x,y) ,得到原始图
像f(x,y)f(x,y)f(x,y) 的近似估计f^(x,y)\hat{f}(x,y)f^(x,y)
G(u,v)=H(u,v)F(u,v)G(u,v)=H(u,v)F(u,v)G(u,v)=H(u,v)F(u,v)
G,H,F分别是退化图像g,点扩散函数h,原始图像f的傅里叶变换
有噪声的情况下是如下形式
G(u,v)=H(u,v)F(u,v)+n(u,v)G(u,v)=H(u,v)F(u,v)+n(u,v)G(u,v)=H(u,v)F(u,v)+n(u,v)
根据对退化系统的点扩散函数h(x,y)h(x,y)h(x,y)和噪声函数的了解,在误差最⼩的情况下,利⽤它们的傅⽴叶变换H(u,v)H(u,v)H(u,v) 和n(u,v)n(u,v)n(u,v) 进⾏估计,如下式所示
F^(u,v)=G(u,v)H(u,v)=F(u,v)+n(u,v)H(u,v)\hat{F}(u,v) = \frac{G(u,v)}{H(u,v)} = F(u,v)+\frac{n(u,v)}{H(u,v)}F^(u,v)=H(u,v)G(u,v)=F(u,v)+H(u,v)n(u,v)
得到F^\hat{F}F^之后通过求他的反变换,得到复原图像
逆滤波复原的步骤是
- 对于退化图像g(x,y)g(x,y)g(x,y) 求⼆维傅⽴叶变换G(u,v)G(u,v)G(u,v)
- 计算h(x,y)h(x,y)h(x,y) 的⼆维傅⽴叶变换H(u,v)H(u,v)H(u,v)
- ⽤n(u,v)n(u,v)n(u,v) 产⽣随机噪声
- ⽤上式计算F^(u,v)\hat{F}(u,v)F^(u,v)
- 求F^(u,v)\hat{F}(u,v)F^(u,v)的反变换,即可得到复原图像
维纳滤波
维纳滤波器(wiener filtering) 的本质是使估计误差(定义为期望响应与滤波器实际输出之差)均方值最小化
而维纳滤波是假定图像信号可以近似看作平稳随机过程,建立在图像和噪声都是随机变量的基础之上,综合考虑退化函数和噪声统计特征两个⽅⾯因素设计滤波器,使得复原后的图像与原始图像之间的均⽅误差最⼩
计算公式为
F^(u,v)=[1H(u,v)×∣H(u,v)∣2∣H(u,v)∣2+Sf(u,v)/Sη(u,v)]G(u,v)\hat{F}(u,v)=
\left[
\frac{1}{H(u,v)}\times\frac{|H(u,v)|^2}{|H(u,v)|^2+S_f(u,v)/S_\eta(u,v)}
\right]G(u,v)F^(u,v)=[H(u,v)1×∣H(u,v)∣2+Sf(u,v)/Sη(u,v)∣H(u,v)∣2]G(u,v)
- G(u,v)G(u,v)G(u,v)为退化图像的傅⽴叶变换
- H(u,v)H(u,v)H(u,v) 是点扩散函数的傅⽴叶变换,
- Sη(u,v)=∣N(u,v)∣2S_\eta(u,v)=|N(u,v)|^2Sη(u,v)=∣N(u,v)∣2为噪声的功率谱
- Sf(u,v)=∣F(u,v)∣2S_f(u,v)=|F(u,v)|^2Sf(u,v)=∣F(u,v)∣2为退化图像的功率谱。
步骤
- 对于退化图像g(x,y)g(x,y)g(x,y) 求⼆维傅⽴叶变换G(x,y)G(x,y)G(x,y)
- 点扩散函数h(x,y)h(x,y)h(x,y) 的⼆维傅⽴叶变换H(x,y)H(x,y)H(x,y)
- 计算噪声图像的功率谱Sη(u,v)S_\eta(u,v)Sη(u,v) 和退化图像的功率谱Sf(u,v)S_f(u,v)Sf(u,v)
- ⽤上式计算
- 求F(u,v)F(u,v)F(u,v) 的反变换,即可得到复原图像
用维纳滤波器,逆滤波起和均值滤波器对图像进行复原和平滑,并对比结果
①实验环境配置
本次实验使用python语言,基于cv2来进行图片的输入输出,基于numpy对图片矩阵进行傅里叶变换以及滤波的处理
import numpy as np
import cv2
②实验基本思路与步骤
- 对图像进行模糊处理,并得到自己的模糊函数
- 通过逆滤波和维纳滤波进行逆变换模拟原来的图像
- 再通过图片平滑进行比对
③核心函数
def mat_motion_blur(image, alpha):
传入初始函数图像以及运动模糊的alpha角度
返回经过运动模糊变化的斜率矩阵
def make_blur(mat, image, epsilon):
产生模糊的图像,第一个为模糊矩阵,第二个为要处理的图片,第三个为误差
def inverse(mat, image, epsilon):
逆滤波进行图像处理
def wiener(mat, image, epsilon, k = 0.01):
维纳滤波进行图像处理,此处k表示S_f/S_eta
def mean(image, str):
进行平滑处理并进行图像输出
④实验效果
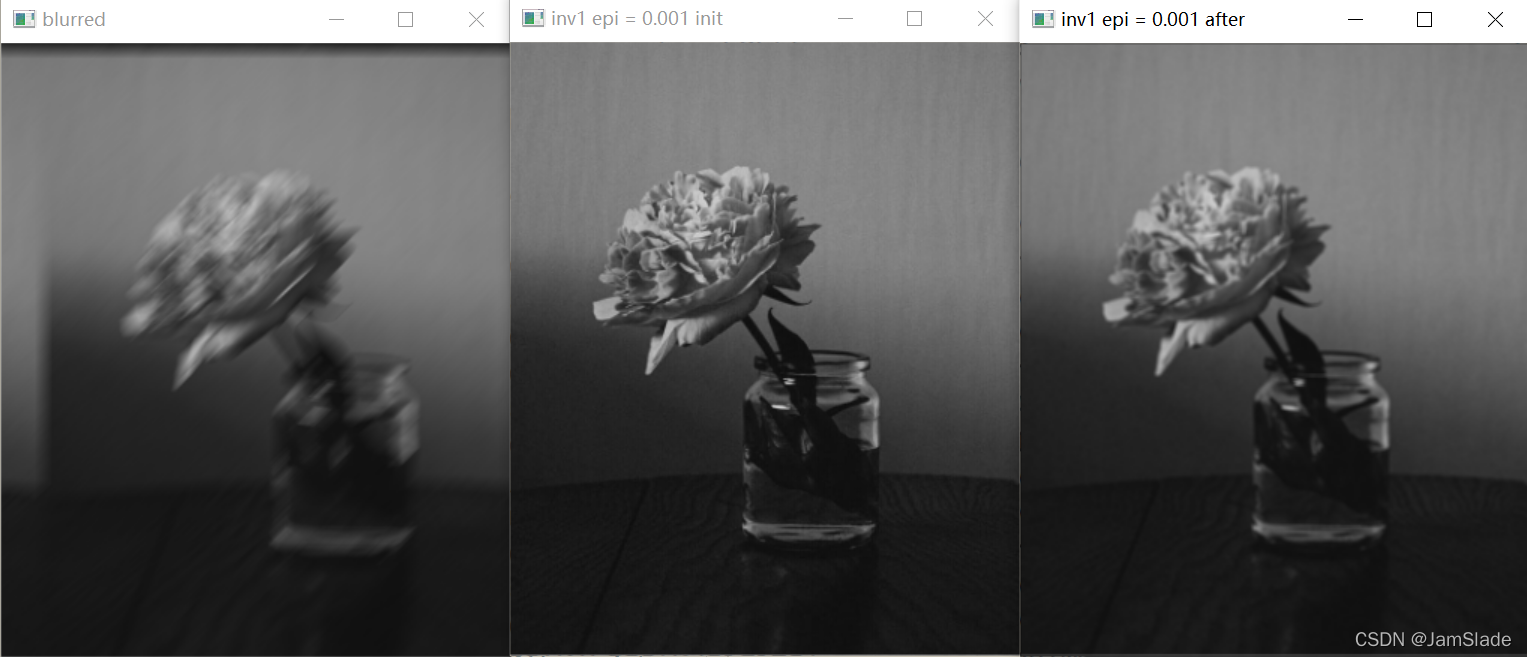
角度为60°且epsilon = 0.01的模糊图像,利用逆滤波进行复原并平滑后的对比图
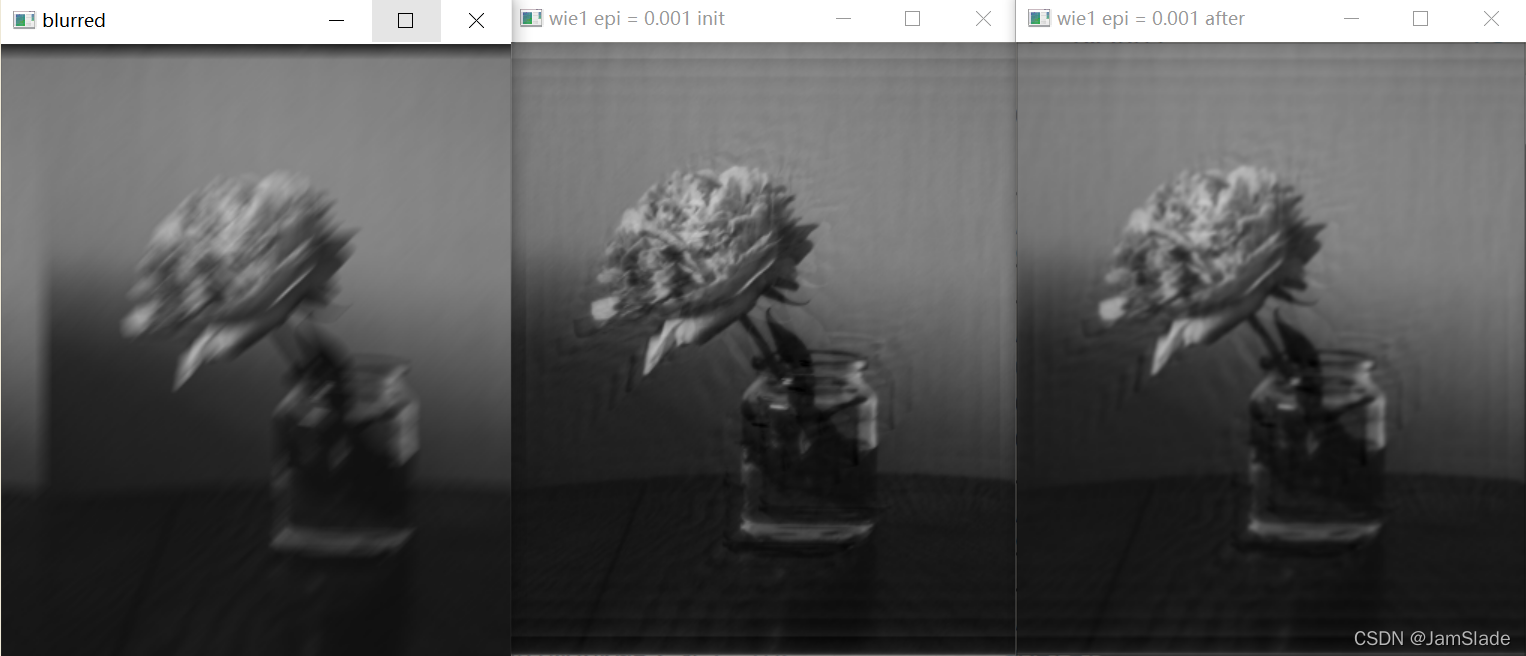
角度为60°且epsilon = 0.01的模糊图像,利用维纳滤波进行复原并平滑后的对比图
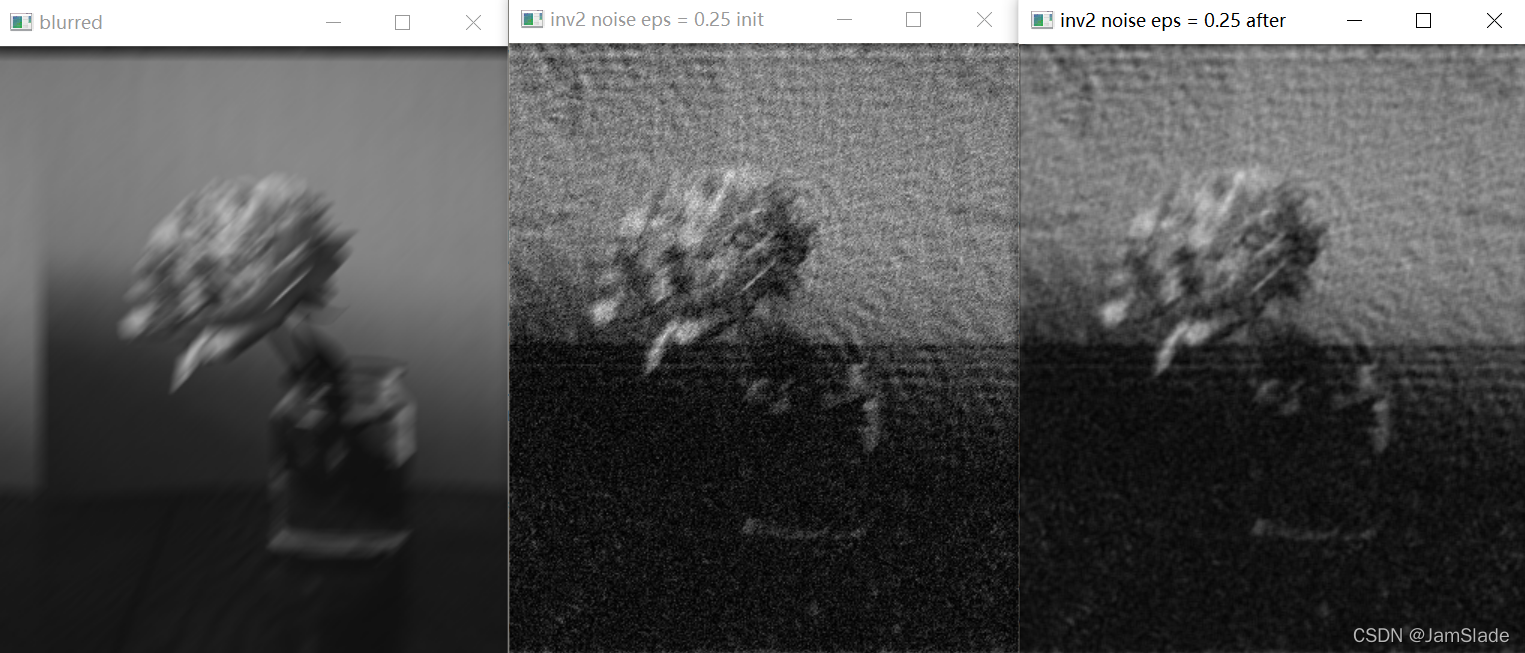
加入随机噪声后epsilon = 0.25的逆滤波图像还原
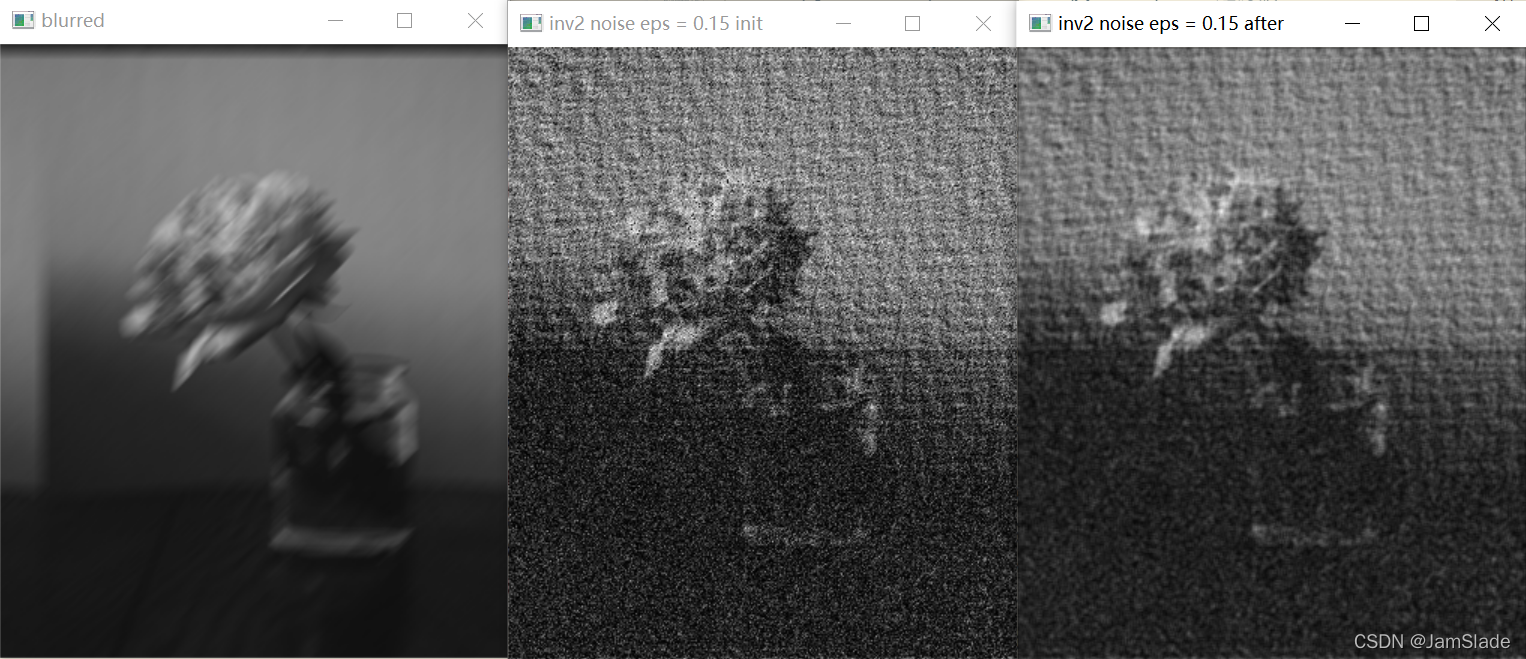
加入随机噪声后epsilon = 0.15的逆滤波图像还原
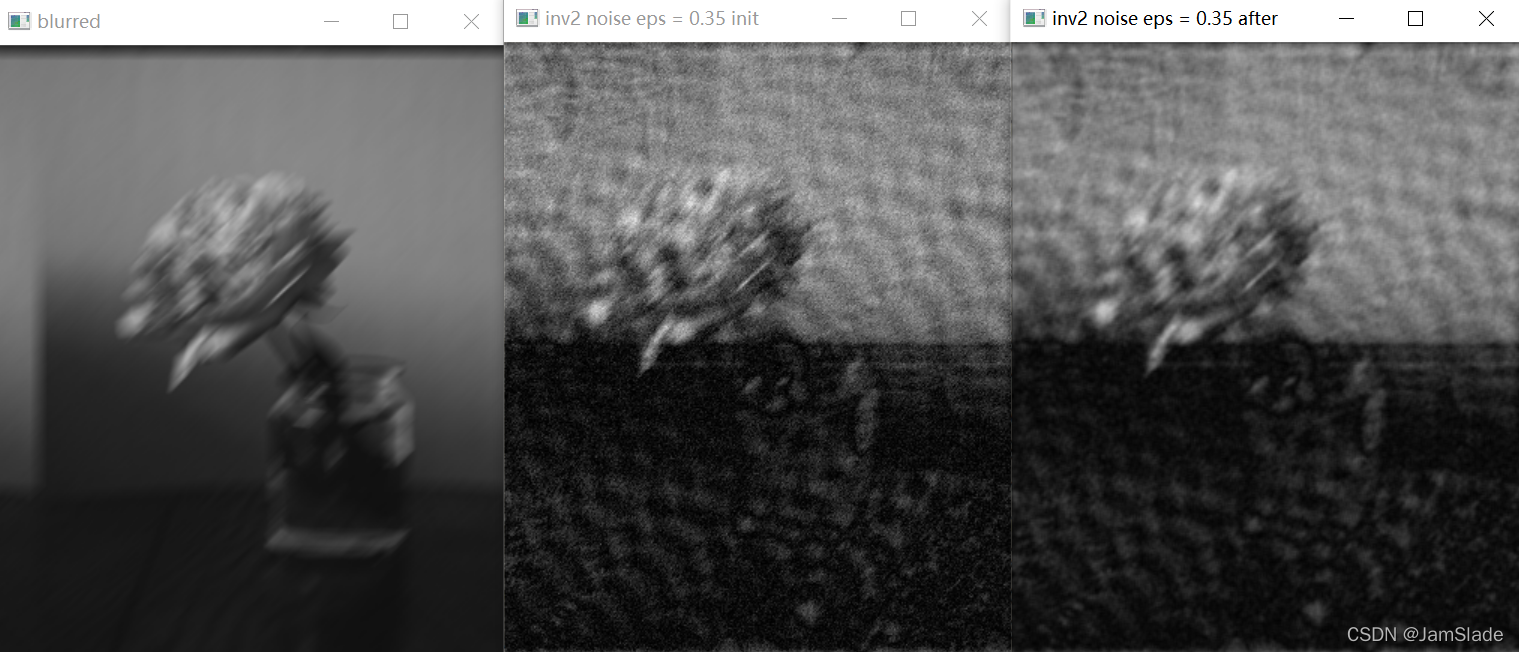
加入随机噪声后epsilon = 0.35的逆滤波图像还原
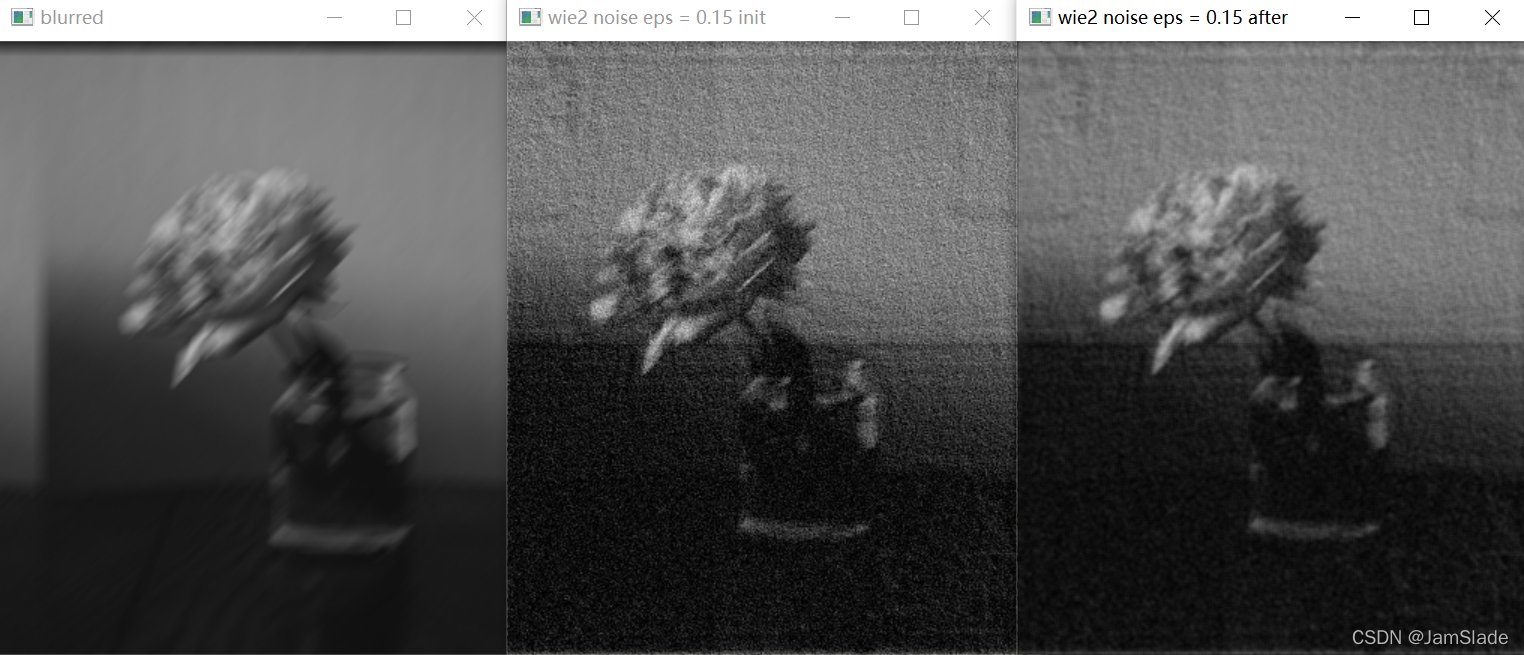
加入随机噪声后epsilon = 0.15的维纳滤波图像还原
加入随机噪声后epsilon = 0.25的维纳滤波图像还原

⑤整合代码
import numpy as np
import cv2
class image_restoration():
def mat_motion_blur(image, alpha):
#对一个角度进行运动模糊处理
height, width = image.shape[:2]
mat = np.zeros((height, width))
center = (height - 1)/2
tangent = np.tan(alpha * np.pi / 180)
if tangent <= 1:
for i in range(20):
offset = np.round(i * tangent)
mat[int(center + offset), int(center - offset)] = 1
else:
for i in range(20):
offset = np.round(i * 1 / tangent)
mat[int(center + offset), int(center - offset)] = 1
# 可以理解为退化函数
return mat / mat.sum()
def make_blur(mat, image, epsilon):
# 产生退化图片g(x,y)
mat_fft = np.fft.fft2(mat)
# 矩阵傅里叶变换
image_fft = np.fft.fft2(image) + epsilon
# 图像傅里叶变换
blurred = np.fft.ifft2(mat_fft * image_fft)
# 运动模糊后变化
## g(x,y) = Hf(x,y)+n(x,y)
blurred = np.abs(np.fft.fftshift(blurred))
# 对fft的部分进行定义域的调整
return blurred
def inverse(mat, image, epsilon):
mat_fft = np.fft.fft2(mat)
# G(u,v)
image_fft = np.fft.fft2(image) + epsilon
# H(u,v)
restore = np.fft.ifft2(mat_fft / image_fft)
#区别在于乘除 F(u,v)
restore = np.abs(np.fft.fftshift(restore))
return restore
def wiener(mat, image, epsilon, k = 0.01):
mat_fft = np.fft.fft2(mat)#G
image_fft = np.fft.fft2(image) + epsilon# H
image_fft_eta = np.conj(image_fft) / (np.abs(image_fft) ** 2 + k)
# 左边整个式子 用k表示S_f/ S_η
restore = np.fft.ifft2(mat_fft * image_fft_eta)
restore = np.abs(np.fft.fftshift(restore))
return restore
def mean(image, str):
cv2.imshow(str+' init', np.uint8(image))
mat = np.array([
[1/9,1/9,1/9],
[1/9,1/9,1/9],
[1/9,1/9,1/9]
])
#res = cv2.filter2D(image, -1, mat);
#cv2.imshow("?",res)
height, width = image.shape[:2]
con = np.zeros((height+2, width+2))
new_img = np.zeros_like(image,dtype=np.uint8)
for y in range(height):
for x in range(width):
con[y+1][x+1] = image[y][x]
for y in range(1,height+1):
for x in range(1,width+1):
new_img[y-1][x-1] = (
mat[0][0]*con[y+1][x+1] + mat[0][1]*con[y+1][x] + mat[0][2]*con[y+1][x-1]+
mat[1][0]*con[y][x+1] + mat[1][1]*con[y][x] + mat[1][2]*con[y][x-1] +
mat[2][0]*con[y-1][x+1] + mat[2][1]*con[y-1][x] + mat[2][2]*con[y-1][x-1]
)
cv2.imshow(str+" after", np.uint8(new_img))
cv2.waitKey(0)
IR = image_restoration
def test():
image = cv2.imread('pic4.png')
image = cv2.cvtColor(image ,cv2.COLOR_BGR2GRAY)
blur_mat = IR.mat_motion_blur(image, 60)
blurred = np.abs(IR.make_blur(image, blur_mat, 0.001))
way1 = IR.inverse(blurred, blur_mat, 0.001)
way2 = IR.wiener(blurred, blur_mat, 0.001)
noise = blurred + 0.1 * blurred.std() * np.random.standard_normal(blurred.shape)
#print(noise)
way3 = IR.inverse(noise, blur_mat, 0.35)
way4 = IR.wiener(noise, blur_mat, 0.25)
cv2.imshow('blurred',np.uint8(blurred))
IR.mean(way4,'wie2 noise eps = 0.25')
cv2.waitKey(0)
if __name__ == '__main__':
test()



















 1151
1151

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









