






 本文介绍了一种利用三角函数实现加速度从a0平滑过渡到零的规划算法,确保位移和始末速度均为零。通过两段三角函数的拼接,有效解决了多项式方法中存在的复杂控制问题。
本文介绍了一种利用三角函数实现加速度从a0平滑过渡到零的规划算法,确保位移和始末速度均为零。通过两段三角函数的拼接,有效解决了多项式方法中存在的复杂控制问题。
公众号“轻松玩转机器人”,欢迎关注。
1、引言
在某些应用场景中,我们需要实现加速度从a0到零、且位移和始末速度都为零的规划。
对于这种问题的解决办法有多项式、三角函数等多种轨迹规划算法可以实现。但是多项式方法要想将加速度、速度和位移曲线进行比较好的控制,是比较麻烦的,而三角函数方法在这方面具有天然的优势。
仅有一段三角函数sin或者cos的规划,是解决不了这个问题的——需要两段三角函数进行拼接,从而完成此规划。
2、规划算法
【分析如何定义三角函数曲线和如何拼接三角函数曲线】
- 定义加速度曲线的三角函数表达式,速度和位移通过积分得到;
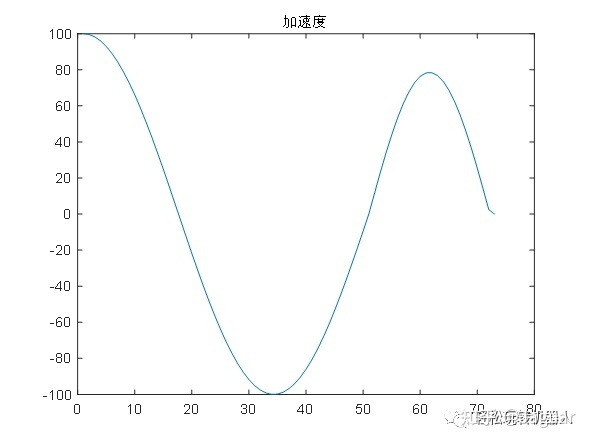
- 因为加速度从a0、速度从零开始运动,而cos(0)=1,且其原函数sin(0)=0,所以第一段加速度函数可以选cos函数;
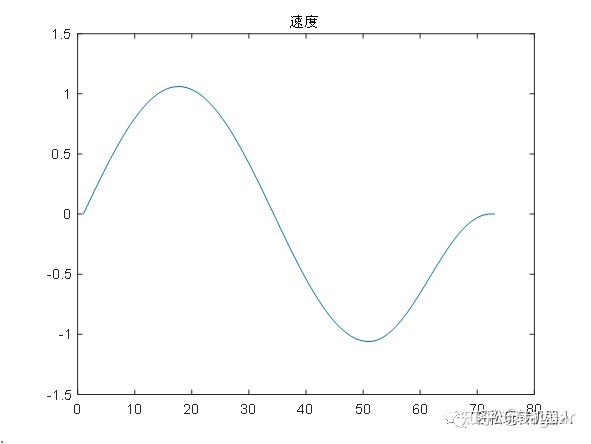
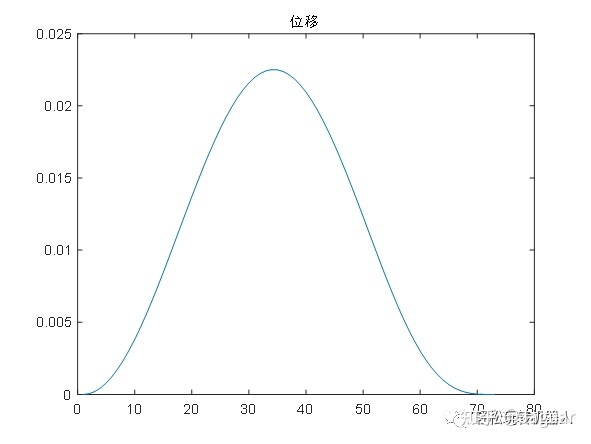
- 由位移为零和末速度为零的条件,可以设计第一段曲线运行3/4个周期,之后再拼接一个三角函数曲线,使衔接点速度、加速度一致,速度曲线与时间轴所夹面积为零(积分,即位移)。
以a0是正值为前提,下图是该规划算法得到的加速度、速度和位移曲线:


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









