




其实,二个圆的交点问题的背景是:全站仪后方交汇法自动设站的原理。这里直接简化为:已知二个圆的圆心坐标和半径(x1,y1)r1 和(x2,y2)r2 ,求它们的交点。之前从圆的一般方程入手,联立两个圆的方程求解交点:详见之前的日志《求两个圆的交点-解析式推导及编程》,总觉表达式较复杂,有没有更简洁的办法。
最近考虑到矩阵的运算,矩阵左乘向量可以对向量进行旋转、平移及拉伸操作,可有具体的实例来演示这种变换?我想到了之前的求两圆交点的问题:若把两个圆心及它们的交点看成一个三角形,首先把这个三角形平移到坐标原点(0,0),然后底边旋转至与x轴平齐,这时已知三角形的三条边a,b,c 再来求解交点就容易多了~,如下图所示:
图1 已知a,b,c求交点就容易多了
求出交点后再把这个坐标”旋转-平移“回去就好了,”先平移再旋转"可以归结为”旋转矩阵左乘平移矩阵“再乘待变换的点,而变换回去,就是相当于左乘它们的逆矩阵!“完美”~!
请看下面的推导过程。
T1为平移矩阵,a为x方同的平移,b为y方向的位移量,至于为什么多一个1,是为了适应矩阵的乘法需要,谓之这种形式为齐次形式。
T2为旋转矩阵,同样二维扩展为三维形式,是为了和平移保持一致。
将二者相乘进行复合得到的矩阵M即表示“先平移再旋转”,注意:这个乘法是有顺序讲究的。矩阵的乘法只满足结合律,不满足交换律。
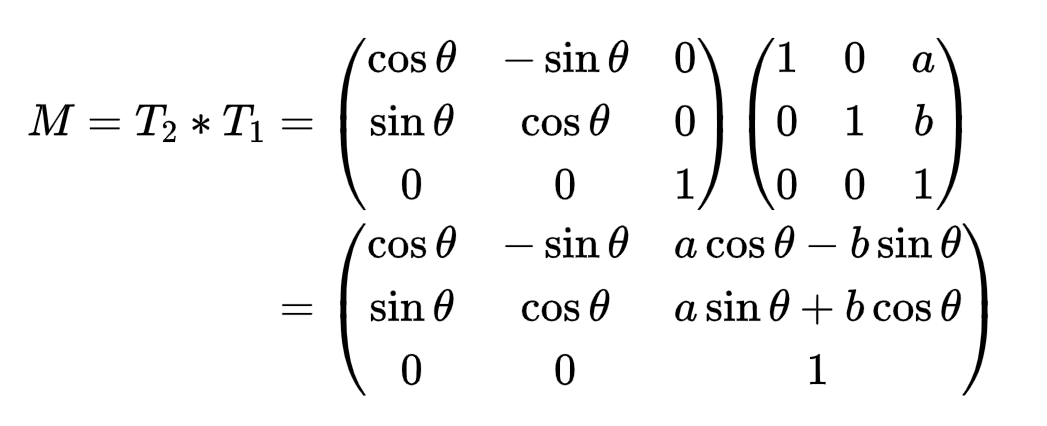
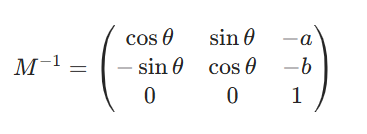
图2 平移与旋转矩阵的合成及其逆矩阵
若设平移矩阵为T1,旋转操作的矩阵为T2,则”先平移再旋转“可表达为 T2 * T1 ,注意T2,T1顺序是不能颠倒的,矩阵的乘法不满足交换律,但满足结合律。尤为神奇的是,先平移再旋转的两步操作可以合成一步完成!即事先计算出T=T2 * T1,然后用T乘以(x,y,1)即可。而T1*T2则表示“先旋转再平移”,考虑一下,它与“先平移再旋转“效果并不一样。
假设已经三角形已经平移旋转到位(图1),先计算出交点坐标,然后左乘T的逆矩阵即可旋转平移到原来的坐标!它的逆过程是相反的:先旋转再平移。然而,你不用太担心具体细节,因为这个过程已经自然地包含在T的逆矩阵里了。这就是数学的神奇之处。
下面通过python编程计算,与CAD绘图结果完全相符,证明方法可行,并且正确!
#解三角形,并用矩阵平移旋转2025-4
import math
import numpy as np
PI=math.pi
x1=3263.592;y1=2797.333;r1=152.360
x2=3638.300;y2=2922.089;r2=306.882
a=math.sqrt((x1-x2)**2+(y1-y2)**2) #底边
b=r1
c=r2
# a,b,c 顺序:a为底边,b为左侧,c为右侧
def TRG(a,b,c)->list:
if a+b>c and a+c>b and b+c>a and a>0 and b>0 and c>0:
p=(a+b+c)/2
s=math.sqrt(p*(p-a)*(p-b)*(p-c)) #海仑公式计算面积
h=2*s/a # 由面积和底边求高h
x=math.sqrt(b**2-h**2)
return [x,h] # 返回顶点bc交点的 x,y 坐标
else:
return [-1,-1] # 错误 的 三角形
JD=TRG(a,b,c) # 对称交点之一
if JD[0]==-1 and JD[1]==-1:
print("\n错误~没有交点!")
exit(0)
#计算与x轴之间的夹角cita
if x2==x1 :
if y2>y1:
cita=PI/2
else:
cita=3/4*PI
else:
cita=math.atan((y2-y1)/(x2-x1))
if x2-x1<0:
cita=PI+cita
# 下面求变换矩阵
cosa=math.cos(-cita)
sina=math.sin(-cita)
#已将(x1,y1)平移到原点并旋转了-cita角,现在将所求交点再变换回去
#逆变换矩阵中,-a=-1*-1*x1=x1,同理-b也可直接写为y1
M=np.array([[cosa,sina,x1],
[-sina,cosa,y1],
[0,0,1]])
print("\n")
for i in range(2):
XY=np.array([[JD[0]],
[(-1)**i*JD[1]], # 对称的2个坐标
[1]])
BH=M@XY #version3.6直接支持矩阵乘法
x=BH[0][0]
y=BH[1][0]
print(f"交点坐标{i+1}:x={x:.3f},y={y:.3f}")
```css
#输出结果:
交点坐标1:x=3331.636,y=2933.655
交点坐标2:x=3399.772,y=2729.006
完美的数学!矩阵的力量!

















 1360
1360

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









