




了解中断-共享队列
文章目录
概念
工作队列是实现中断下半部分的机制之一, 是一种用于管理任务的数据结构或机制。 它通常用于多线程, 多进程或分布式系统中, 用于协调和分配待处理的任务给可用的工作线程或工作进程。
个人理解:队列队列就是queue,和我们其它语言中的概念并无太大区别,放置元素地方嘛。这里我们了解的共享工作队列里面放置的是工作项: work_struct
工作项 - work_struct
工作队列里面放的是工作项,我们看看这个结构体定义:
struct work_struct {
atomic_long_t data;
struct list_head entry;
work_func_t func; /* 工作队列处理函数 */
};
typedef void (*work_func_t)(struct work_struct *work); //工作函数
暂时可以理解为 一个元素对象吧,在C语言中就是结构体表示而已。
一、参考资料
RK3568中断-tasklet
Linux驱动实践:中断处理中的【工作队列】 workqueue 是什么鬼?
RK3568驱动指南|第五期-中断-第44章 共享工作队列实验
linux中断下文工作队列之共享工作队列(中断四)
二、共享工作队列的 API 方法
| 函数/宏 | 说明 |
|---|---|
| DECLARE_WORK(name, func) | 静态定义工作,并绑定处理函数 |
| INIT_WORK(work, func) | 动态初始化工作 |
| schedule_work(work) | 调度工作(加入 system_wq 队列) |
| schedule_delayed_work(dwork, delay) | 延迟调度(delay 单位:jiffies) |
| cancel_work_sync(work) | 取消工作,并等待其完成 |
| flush_scheduled_work() | 刷新全局共享队列(等待所有工作完成) |
其中核心方法 动态初始化 INIT_WORK ->调度共享队列-> schedule_work
三、共享队列使用方法-核心api方法说明
初始化工作项-INIT_WORK
在实际的驱动开发中, 我们只需要定义工作项(work_struct)即可, 关于工作队列和工作者线程我们基本不用去管。 简单创建工作很简单, 直接定义一个 work_struct 结构体变量即可,然后使用 INIT_WORK 宏来初始化工作, INIT_WORK 宏定义如下:
#define INIT_WORK(_work,_func)
INIT_WORK 宏接受两个参数: _work 和 _func, 分别表示要初始化的工作项和工作项的处理函数。
调度/取消调度工作队列函数-schedule_work- cancel_work_sync
和 tasklet 一样, 工作也是需要调度才能运行的, 工作的调度函数为 schedule_work, 函数原型如下所示:
static inline bool schedule_work(struct work_struct *work)
参数是指向工作项的指针。 这个函数作用是将工作项提交到工作队列中, 并请求调度器在合适的时机执行工作项。 该函数会返回一个布尔值, 表示工作项是否成功被提交到工作队列。
如果想要取消该工作项的调度, 使用以下函数:
bool cancel_work_sync(struct work_struct *work);
参数是指向工作项的指针。 这个函数的作用是取消该工作项的调度。 如果工作项已经在工作队列中, 它将被从队列中移除。 如果工作项已经在工作队列中, 它将被从队列中移除, 并等待工作项执行完成。 函数返回一个布尔值, 表示工作项是否成功取消
小结
对比中断task RK3568中断-tasklet 会发现使用基本一致。
- 在驱动加载的时候初始化相关内容,这里初始化的是工作项,同步绑定工作项处理函数。
- 初始化完成后,在中断触发回调的中断上文函数中,执行中断下文机制。这里机制是 让共享工作队列调度工作项 schedule_work 方法。
- 我们一直说共享工作队列,有共享队列的方法? 没有,它是系统内部机制,驱动程序上面看不到的,负责调度工作项即可。
四、共享队列驱动程序调试
#include <linux/module.h>
#include <linux/init.h>
#include <linux/interrupt.h>
#include <linux/gpio.h>
#include <linux/delay.h>
#include <linux/workqueue.h>
int irq;
struct work_struct test_workqueue;
// 工作项处理函数
void test_work(struct work_struct *work)
{
msleep(1000);
printk("This is test_work\n");
}
// 中断处理函数
irqreturn_t test_interrupt(int irq, void *args)
{
printk("This is test_interrupt\n");
// 提交工作项到工作队列
schedule_work(&test_workqueue);
return IRQ_RETVAL(IRQ_HANDLED);
}
static int interrupt_irq_init(void)
{
int ret;
irq = gpio_to_irq(101); // 将GPIO映射为中断号
printk("irq is %d\n", irq);
// 请求中断
ret = request_irq(irq, test_interrupt, IRQF_TRIGGER_RISING, "test", NULL);
if (ret < 0)
{
printk("request_irq is error\n");
return -1;
}
// 初始化工作项
INIT_WORK(&test_workqueue, test_work);
return 0;
}
static void interrupt_irq_exit(void)
{
free_irq(irq, NULL); // 释放中断
printk("bye bye\n");
}
module_init(interrupt_irq_init);
module_exit(interrupt_irq_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("fangchen");
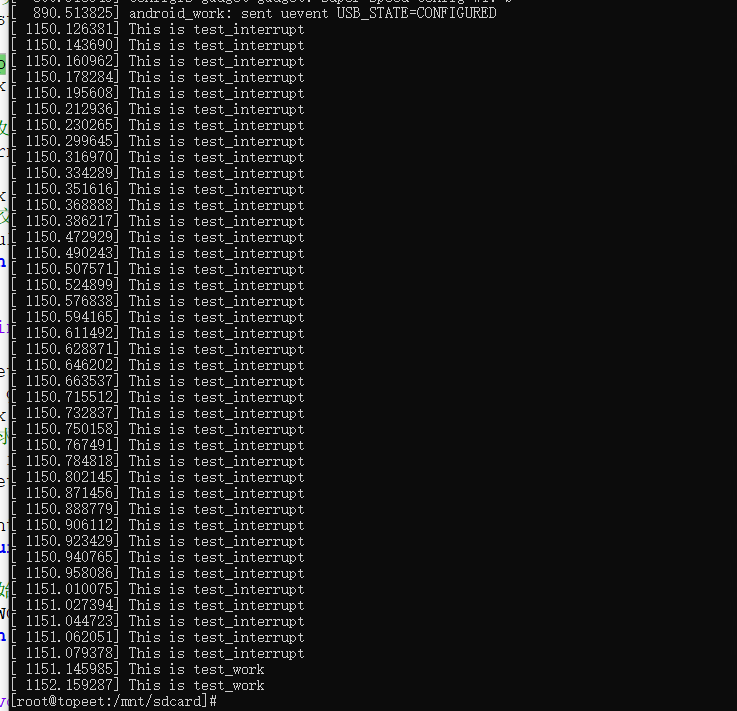
加载驱动后,点击屏幕,看一下内核日志:
思考
- 如同上面所说,我们一直说共享工作队列,有共享队列的方法? 没有,它是系统内部机制,驱动程序上面看不到的,负责调度工作项即可。 schedule_work 方法实际上就是把工作项提交到共享工作队列中。
- 你看日志打印,为什么 This is test_interrupt 一直打印,This is test_work 只是打印了两次。 这里要搞清楚 msleep(1000); 用法。 如:msleep 阻塞导致调度延迟如果频繁调用 schedule_work(),而工作项中的 msleep(1000) 尚未完成,后续调度可能被合并或丢弃。
共享工作队列的适用场景
- 需要睡眠的任务(如内存分配、I/O 操作)。
- 非紧急的中断下半部(如数据处理、日志记录)。
- 替代 Tasklet:如果 Tasklet 不能睡眠,但任务需要调用可能阻塞的函数。
共享工作队列的限制
- 调度延迟不可控:由于共享队列,可能被其他任务影响。
- 不适合高实时性任务:如果要求低延迟,应使用自定义工作队列或 SoftIRQ。
五 、共享工作队列 vs. Tasklet
| 特性 | 共享工作队列 | Tasklet |
|---|---|---|
| 执行上下文 | 进程上下文(可睡眠) | 软中断上下文(不可睡眠) |
| 并发性 | 可能并行(多 CPU) | 同一 Tasklet 串行执行 |
| 适用场景 | 耗时、可能阻塞的任务 | 轻量级、原子性任务 |
| 调度方式 | schedule_work() | tasklet_schedule() |
总结
- 定义工作 → DECLARE_WORK 或 INIT_WORK
- 编写处理函数 → 可以调用可能睡眠的函数
- 调度工作 → schedule_work()(共享队列)
- 清理工作 → cancel_work_sync()
- 队列相关知识先了解到这里,在这里对比 tasklet 使用方式上 基本一致的。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











