



开头先给大家公布一个好消息,我们的永久会员重新规划上架了:

我用夸克网盘分享了「音律雨滴.zip」,点击链接即可保存。
链接:https://pan.quark.cn/s/f690713ebb4c
作品介绍:
🎵 用雨滴谱写你的音乐宇宙! 🎵
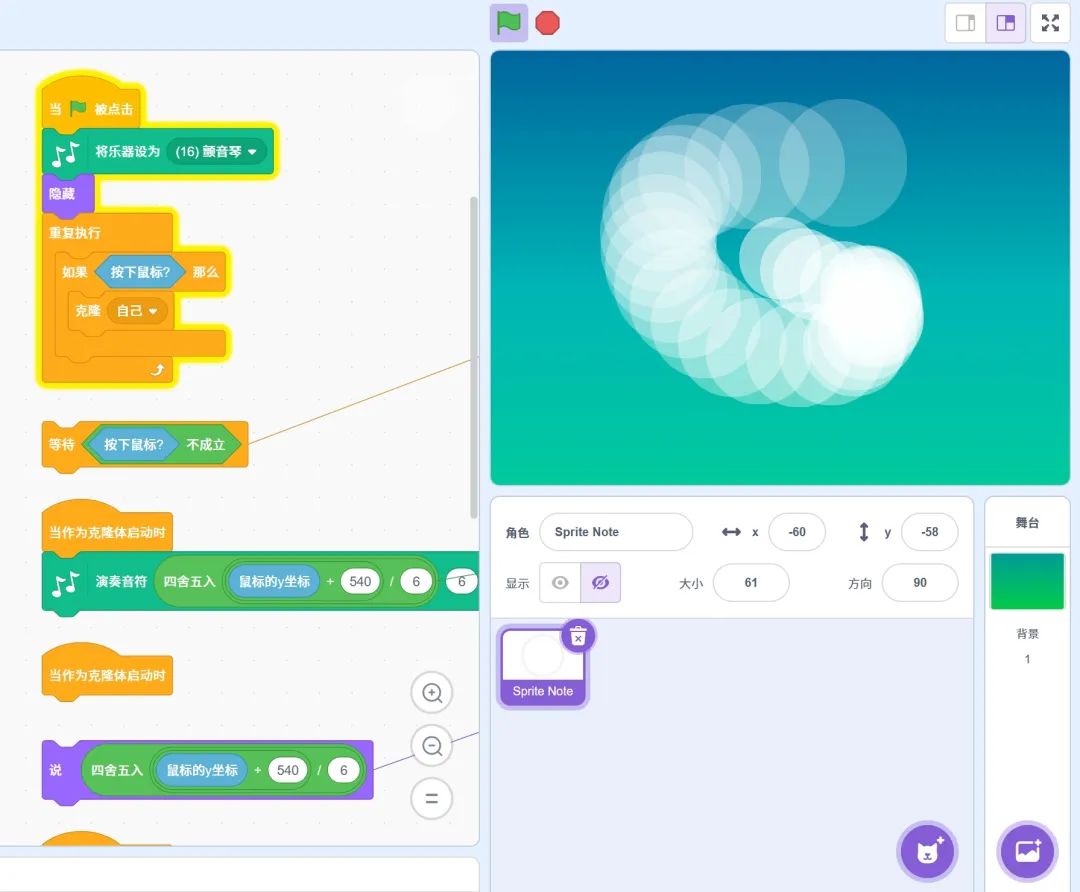
《音律雨滴》是一款Scratch音画互动程序,通过点击或拖拽鼠标在舞台上创造独特的音乐与视觉效果。每一滴雨滴都是一个音符,每一次点击都是一次创作,快来打造属于你的视听盛宴!
🎮 核心玩法:
▸ 点击舞台 生成雨滴,触发音效与视觉效果
▸ 拖拽鼠标 绘制连续音符,创造流畅旋律
▸ 自定义设置:
更换角色与背景,打造个性化舞台
调整乐器音色与音效参数
对克隆体应用不同特效,丰富视觉层次
✨ 创意亮点:
✅ 视听融合:
雨滴下落轨迹与音高/音量联动
特效(如波纹/光晕)随节奏变化
✅ 开放创作:支持实时混音与视觉特效叠加
可导出作品为音画片段,分享你的创作
✅ 教育价值:通过互动理解声音频率与波形
学习克隆体与事件广播机制

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









