




本文包含公式和理论方法描述。如果要看精简版,请移步突破室外非视距多点定位数据异质性瓶颈--AMDNloc通信定位工作开源笔记-精简版 - 知乎
引言
在复杂的城市环境中,非视距(NLOS)场景下的定位技术一直是行业难题。传统方法依赖单一信号特征,易受建筑遮挡、多径干扰等影响,导致定位精度不足。如何让设备在遮挡环境下也能“看清”位置?黄崇文课题组提出多源信息融合学习高效解决方案!
核心问题
MIMO-OFDM的发展使得场景中每个点具有独特的多径效应,指纹定位方法将可以表征多径效应的信道信息作为指纹反向推理坐标点。然而,目前的指纹定位算法选用一种信道信息作为指纹,存在一个场景中相距较远的点指纹几乎一致的情况,因此破坏独立同分布假设;为了解决这个问题,现有方法通常通过人工手段将分类区域提前划分为网格,然后迭代缩小网格区域直到找到与测试样本最接近的指纹,然而目前的网格的划分方式多为规则划分,比如矩形,已有的不规则划分的工作也没有能保证每个区域内的样本的多径效应极高相似;其次,已有的推理方法直接建立指纹与坐标的对应关系,忽视反向推理带来的区域协变量和数据异质性分布等问题。
创新亮点:AMDNLoc框架
课题组研发的自动同步多域NLOS定位融合学习框架(AMDNLoc),通过三大核心突破实现技术跃升:
1️⃣ 多源信号融合:首次联合CIR、CFR、ADCAM等多维度(时间、频率、能量、角度)信道特征,全面刻画位置“指纹”,破解单一特征易混淆的难题。
2️⃣ 智能区域划分:基于图像化处理和聚类算法,动态生成不规则定位区域,适配复杂场景,提升相似位置的区分度,避免迭代化的人工划分网格导致的误差累积。
3️⃣ 神经网络优化:引入ResNet18模型+区域分类器,融合全局与局部特征,定位误差降低50%以上!
主要理论方法
系统模型
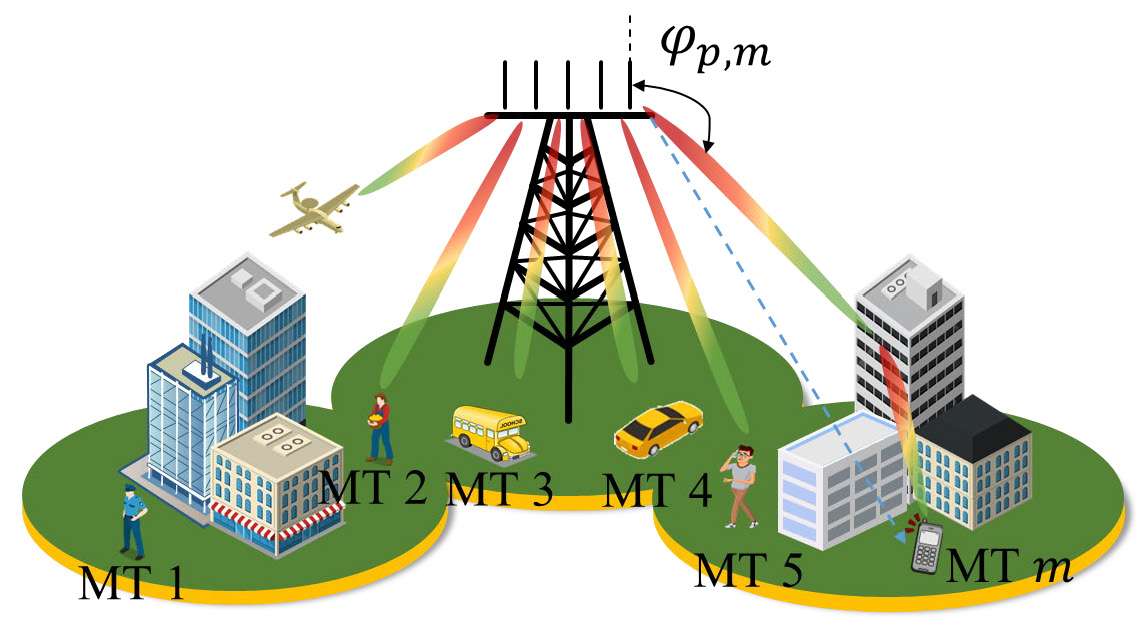
本文提出了一种基于MIMO-OFDM技术的多用户下行通信系统模型,用于非视距(NLOS)指纹定位问题,系统模型如图2所示。基站(BS)配备均匀线性阵列 (ULA) 天线,天线数量为, M 个用户终端 (MT) 配备全向天线,角度到达(AOA)和传播路径 p的距离分别表示为
和
。CIR 向量
的数学表达式为:
![]() (1‑1)
(1‑1)
其中,是路径增益,e(ϕ) 是阵列响应向量,其形式为:
 (1‑2)
(1‑2)
信道频率响应(CFR)是不同时间延迟路径 CIR 的和,表示为:
 (1‑3)
(1‑3)
其中为 OFDM 子载波的数量,
是第 p条路径的采样延迟。总体 CFR 矩阵为:
![]() (1‑4)
(1‑4)
通过离散傅里叶变换 (DFT) 将 CFR 映射到稀疏结构,角度-时延通道幅度矩阵(ADCAM)定义为:
 (1‑5)
(1‑5)
其中V 和F分别为 DFT 矩阵:
 (1‑6)
(1‑6)
在指纹定位中,CIR、CFR和ADCAM均可以作为表征空间中每个点的独特信道特性。这些信道特性捕捉了不同路径的多径效应,包括AOA、时延、增益等信息,从而为场景中的每个位置点提供了独特的“指纹”标识。指纹的定位为:
![]() (1‑7)
(1‑7)
其中,p=[x,y] 是用户位置坐标,pw是系统参数,例如频率、天线响应、阵列结构等。
反向定位的过程是利用观测到的指纹,反向推理出用户的位置 p。但在实际场景中,由于信道特性受到区域协变量(例如建筑分布、天气、区域干扰等)影响,导致分布异质性,使得定位精度下降。因此,反向映射过程表示为:
![]() (1‑8)
(1‑8)
其中,表示反向映射过程,cw是区域协变量,包括地理环境、天气、建筑遮挡等因素。
为了提高定位精度并解决分布异质性问题,研究的核心目标是消除区域协变量 cw 的影响,使指纹与位置之间建立一一映射关系,确保反向定位过程具有稳定性和鲁棒性。通过结合CIR、CFR和ADCAM等多维度信道特征,可以更准确地表征空间中每个点的独特特性,从而有效提升定位系统的性能。
频率域特征分类-平行特征CFR(PFCFR)
本研究发现,当将CFR矩阵表示为二维灰度图像时,每张图像都展示了其特定区域内水平和垂直平移结构的特征。本研究将CFR矩阵中表现出的这些特定区域特征称为PFCFR。在空间位置接近的两个点,当它们的多径效应也相似时,生成的CFR的空间模式也更加接近,导致PFCFR的相似度更高。
因此,本研究首先提取样本点的PFCFR特征,并基于这些特征对CFR进行分类,以确保每个类别中的指纹具有类似的多径效应。这种多径效应的分类通过对CFR的频率特性进行区域划分来实现。
PFCFR的提取步骤如下:
1. 灰度图像表示
将CFR矩阵𝐻转换为二维灰度图像,其中x轴表示载波频率,y轴表示天线对。这种图像化处理使CFR数据的空间分布模式更加直观,为后续特征提取奠定基础。
2. 基于归一化交叉相关(NCC)的模板匹配
- 系统采用模板匹配方法,通过在CFR灰度图像上滑动模板来计算其与不同区域的相似性。
- 相似性通过NCC进行量化,其公式为
 (1‑9)
(1‑9)
其中表示模板图像,
是CFR灰度图像,
是模板与图像区域之间的相似性度量。
3. 双阶段匹配滤波
通常需要遍历CFR图片的每个像素点才能找到对应的PFCFR,为了提高效率,我们采用双阶段匹配滤波方法更准确地提取PFCFR:
- 类别内匹配:根据PFCFR特征的相似性将CFR图像分组。当模板与图像的相似度超过预设阈值
时,图像被划分到相同的类别中。
- 类别间匹配:比较不同类别模板之间的相似性,当相似度超过阈值
时,合并这些类别。
4. 分类结果输出
匹配完成后,每个CFR图像都被分配到一个基于其PFCFR特征的特定类别中。这些分类结果将作为后续数据处理和分析的基础。
角度时延域特征分类-ADCAM
通过PFCFR已经能够在将指纹进行预分类,然而由于该分类只在频率域中进行,仍存在一些物理距离较远的坐标点的多径效应比较相近的情况,要想破除这种情况,需要从更多的信息维度来表征每个点信道信息的独特性质。
本文引入角度时延域指纹ADCAM及路径的角度、延时、增益信息来进行表征。ADCAM通过对CFR矩阵进行DFT变换,将信道特性映射到一个稀疏的角度-时延二维空间中,使得不同的多径信道特征可以更加清晰地表示。这种矩阵能够有效表征无线传播环境中的多径特性,尤其在NLOS场景中具有显著优势。
ADCAM的分类步骤如下:
- 将ADCAM矩阵以二维灰度图像的形式表示,方便后续分类算法处理
- 使用聚类算法对ADCAM矩阵中的信道特性进行分类。主要步骤如下:
- 选择聚类数量 𝐾:通过轮廓系数 (SC) 和 Calinski-Harabasz (CH) 指数评估聚类质量,选择最优聚类数量 𝐾。
- SC方法公式:
![]() (1‑10)
(1‑10)
其中 a(i)和 b(i)分别为点到簇内中心和簇间距离。
- CH方法公式:
![]() (1‑11)
(1‑11)
其中和
分别表示类间和类内协方差矩阵。
- 根据聚类结果将ADCAM特征分组。
数据融合与清洗
将ADCAM分类结果与PFCFR分类结果相结合,把拥有相同的两个分类的样本点分为同一类。删除样本数量小于阈值的类别,消除可能的噪声和异常点,同时保证样本的覆盖率。当用户在一个位置点的样本异常时,他可以左右移动以获得另外的样本点,这样通常就不会是异常点,可以进行正常的定位。
神经网络训练
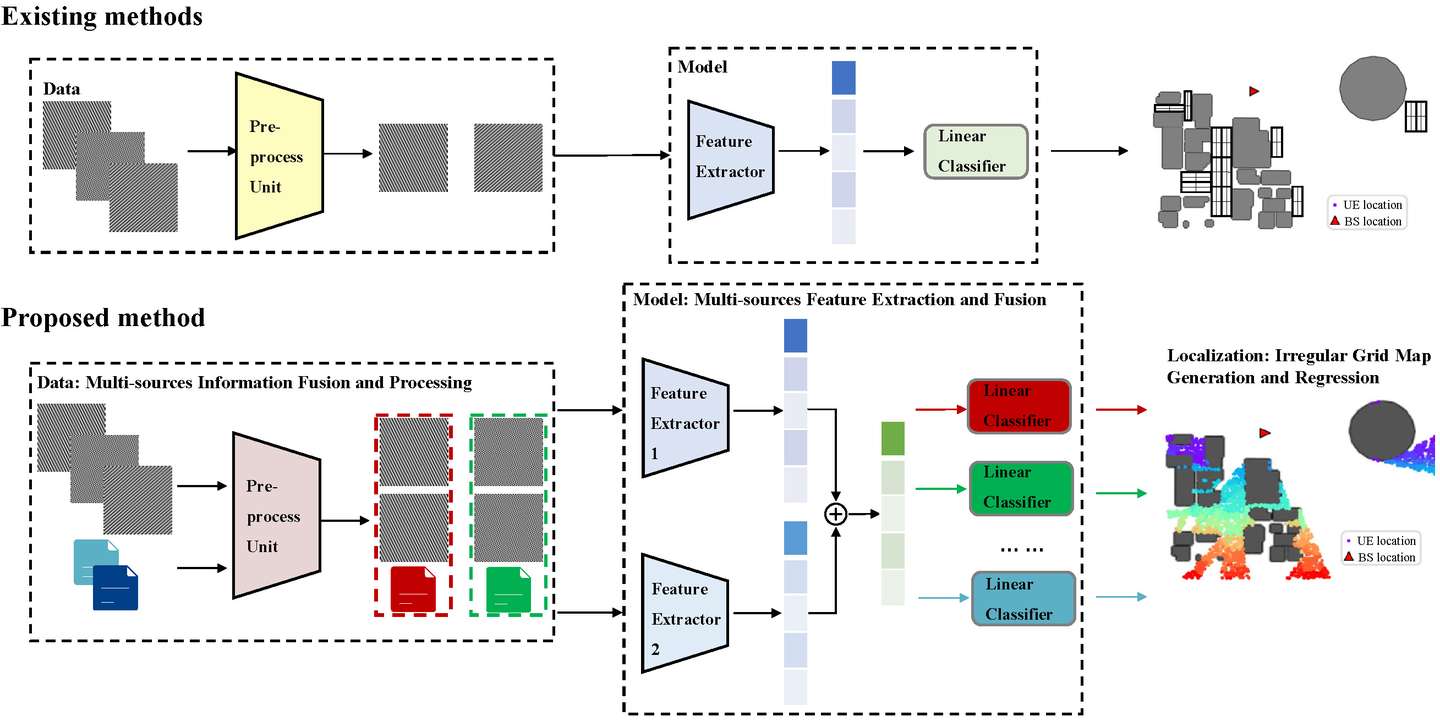
当我们拥有了预分类,接下来就想通过神经网络训练,在各自的分类区域进行定位,大大减少不必要的误差,同时保证提取的特征基于完整的场景信息。此过程包括特征提取、特征融合和滤波回归,在滤波回归阶段加入预分类结果,通过特定细分区域的多头线性分类机制建立各特征区域内指纹与位置的函数关系,具体如图1所示。其数学表达式为:
![]() (1‑12)
(1‑12)
其中,和
是基于ResNet18模型从CFR或ADCAM图像中提取特征并映射为固定长度向量的映射函数;P是一个特征融合函数,用于将两组特征合并为相同维度的向量;
是一个区域特定的线性分类器机制,在每个区域内对融合的特征进行线性分类并用于回归操作。变量
表示最终分类的数量,每个线性分类器对应一个区域,记为 𝑖。此外,
,其中 𝑗 表示异质性匹配后属于第 𝑖 个分类区域内的第 𝑗 个样本。
训练中使用的损失函数是均方误差(MSE),用来衡量真实位置坐标 𝑝 和预测位置坐标之间的误差,公式为:
 (1‑13)
(1‑13)
其中𝑛=16表示小批量的样本数量。
仿真结果
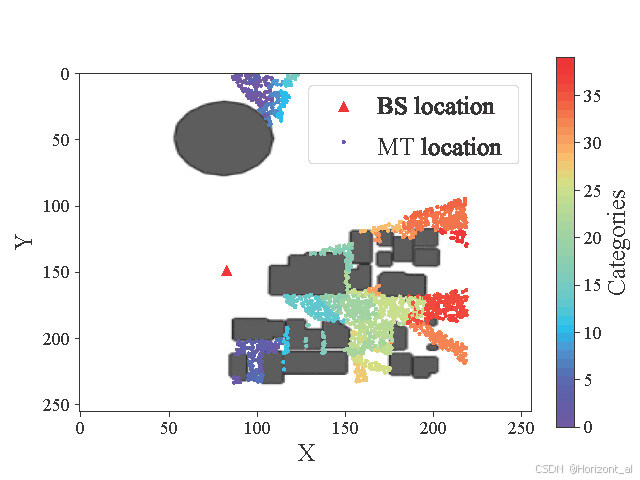
首先,我们可视化了预分类后的NLOS区域如图3所示。在图中我们看到在空间中多径效应相似的样本都被归为了同类,并且每个区域都拥有不规则的边界线。
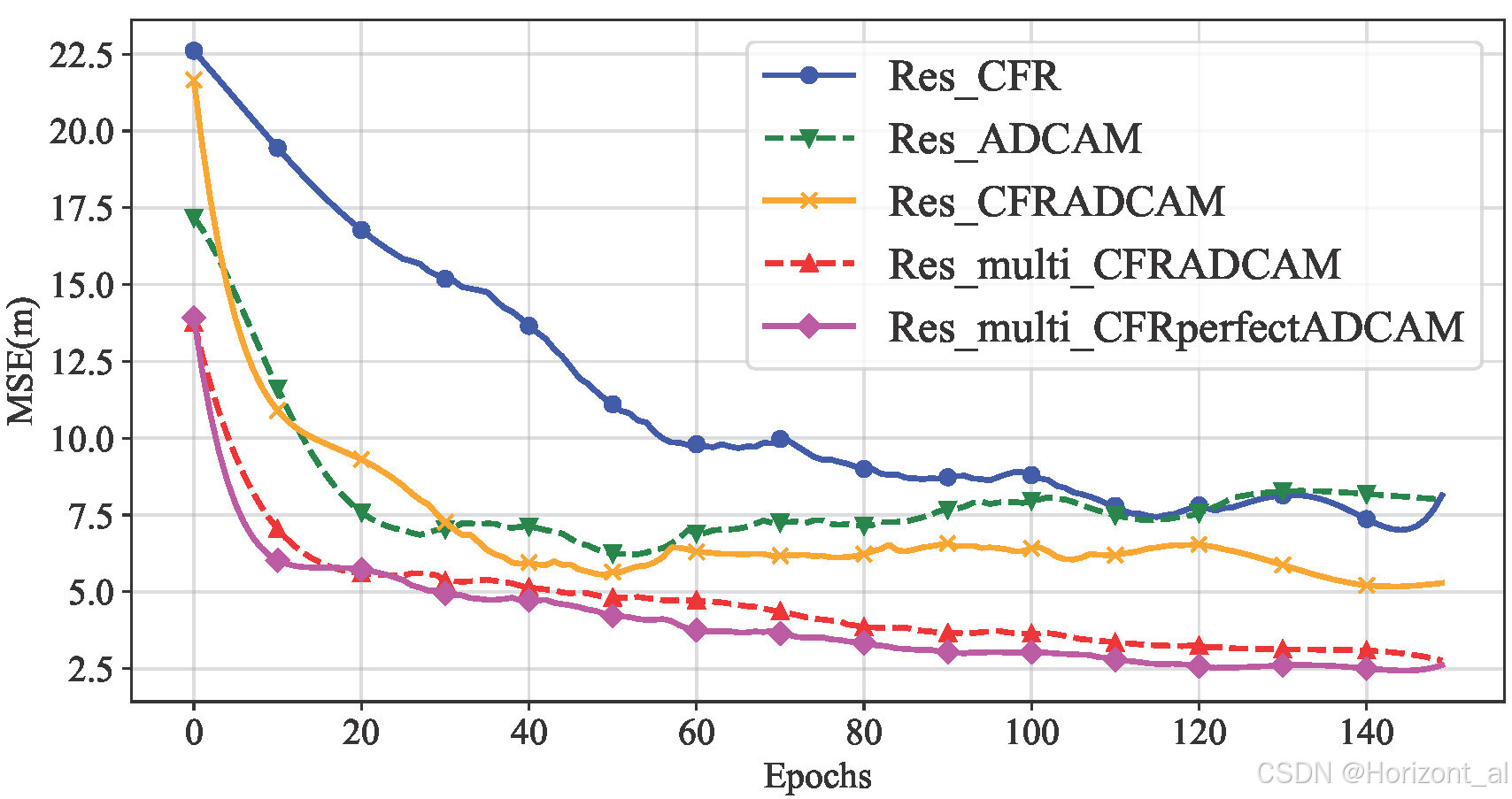
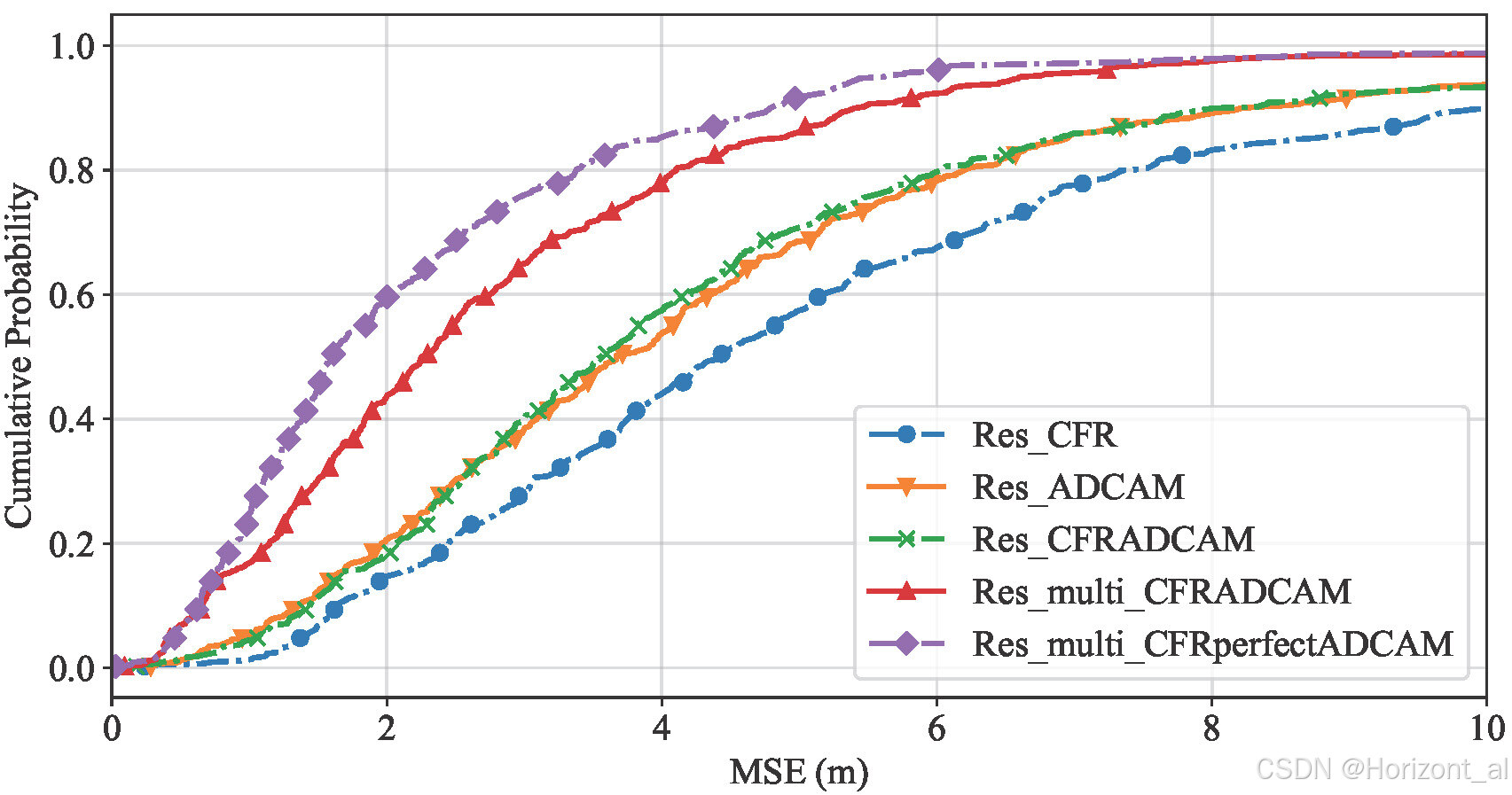
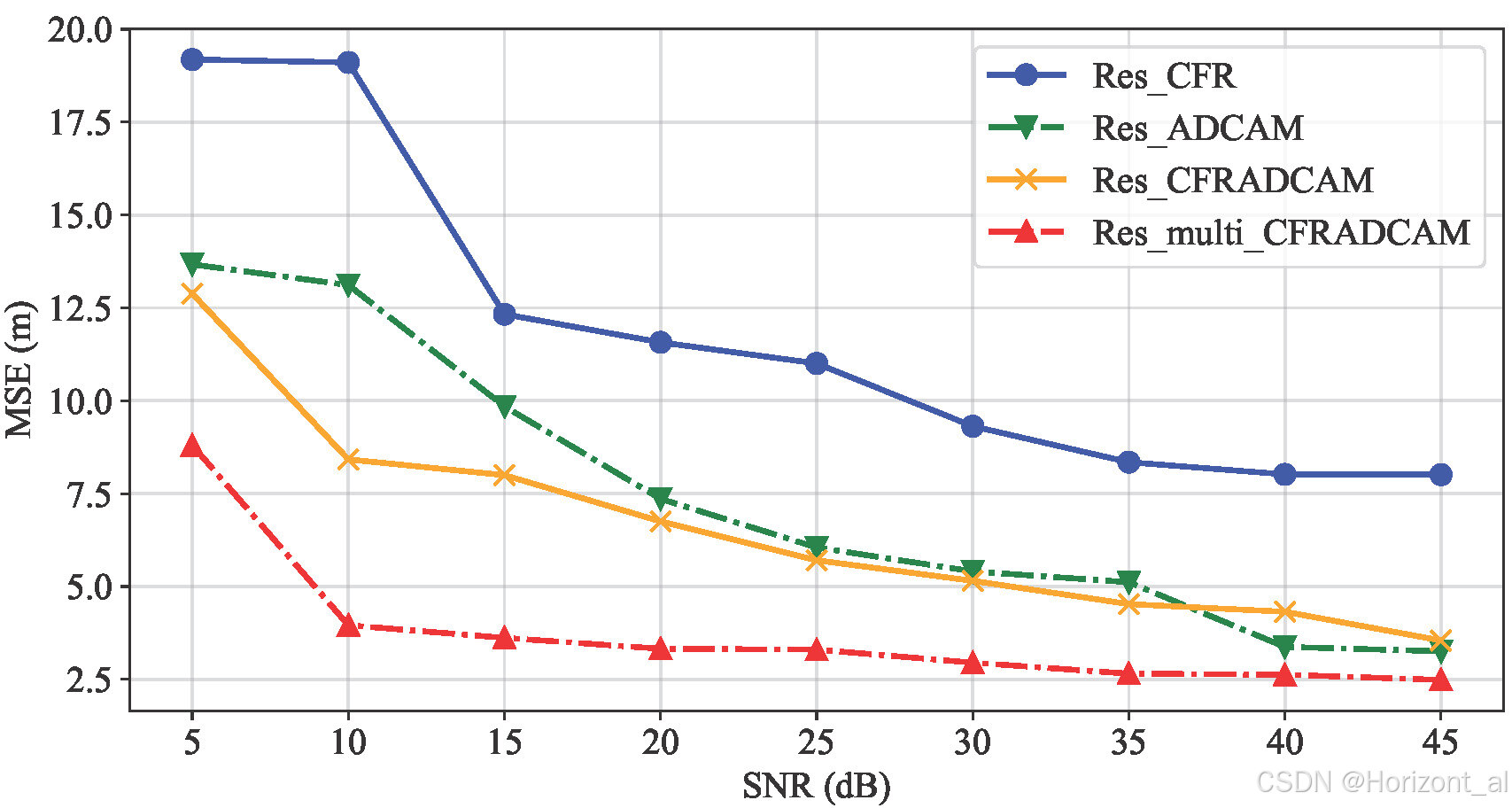
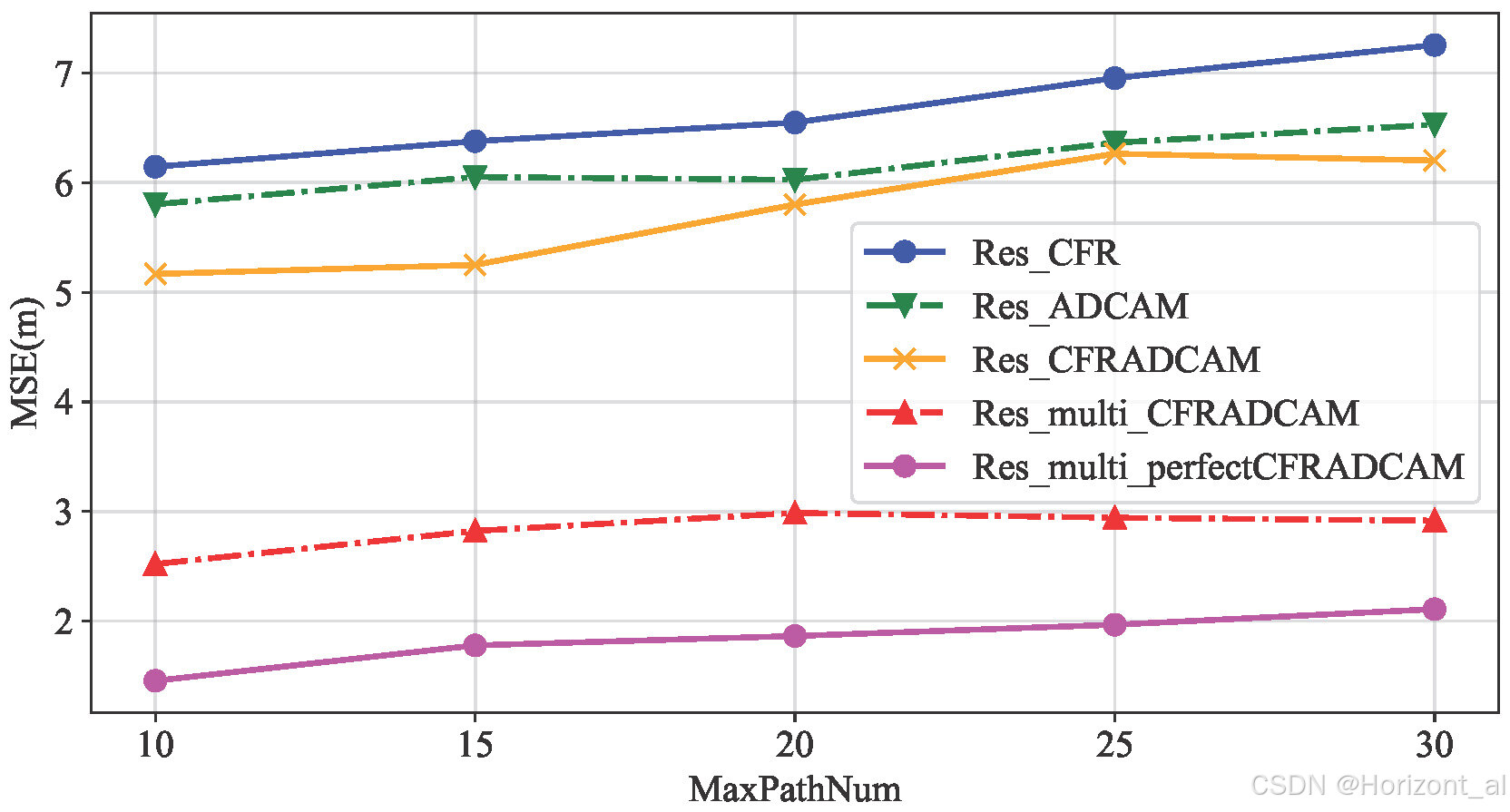
仿真结果图4证明,AMDNLoc优于利用CNN直接建立指纹与位置的函数关系的传统AI算法,并且消融验证我们的每一步操作都对结果有所提升。仿真结果图5证明,我们通过更改SNR、最大反射路径等系统参数和数据清洗的程度,验证AMDNLoc在不同系统配置下都能保持较高的场景覆盖率和定位精度。
同时,我们更改了各种数据集和同一数据集的不同场景如表1所示。我们按照建筑数量由少到多,选定DeepMIMO O1阻塞场景、WAIR-D 00247和WAIR-D 00743场景,经过400轮迭代训练后,观察到当加入分段特定的线性分类器后(Res_multi_CFRADP),定位精度上表现出显著的提升,尤其是在建筑数量较多的场景中。在实际中,通常难以获得完美的角度、信道增益等数值信息,经过我们算法,发现使用ADCAM的图片作为指纹能够接近选用获得的角度、信道增益等数值信息,说明我们算法很好地提取了各个域的有效信息来划分定位区域。
表1 多场景多数据集的UPA阵列对应的MSE
| 方法 | DeepMIMO O1 blockage场景 | WAIR-D 00247场景 | WAIR-D 00743场景 |
|---|---|---|---|
| Res_CFRADP | 1.66 | 2.23 | 4.21 |
| Res_multi_CFRADP | 1.11 | 1.54 | 1.99 |
| Res_multi_CFRperfectADP | 0.92 | 1.11 | 1.25 |
同时,我们还使用不同的CV结构作为特征提取器,比如DenseNet121,ResNet18和轻量级Transformer框架 EfficientformerV2。结果表明使用ResNet18能够最好地平衡时间和精确度,这是由于我们的预分类已经提供了足够的先验信息给神经网络进行训练,因此ResNet18可以接近EfficientformerV2的精度。由于篇幅有限,未展示的结果可以在论文中的对应板块查阅。
总结
本文面向无线AI感知通信一体化理论技术与方法,研究利用先进神经网络技术基于通信数据进行室外NLOS场景的多点定位方法。本文提出一种自动同步多域NLOS定位融合学习处理框架(AMDNLoc)如图1所示。围绕指纹定位算法,利用匹配滤波、基于信息融合的图像追踪技术、基于质心的聚类算法、数据清洗方法对信道信息在频率、时延、角度域的特征进行提取整合;选用成熟的CV架构提取场景全局特征后,引入特定细分区域的多头线性分类机制建立各特征区域内指纹与位置的函数关系。仿真结果证明,在多个数据集和多个场景的验证中,NLOS的定位精度可以稳定在1-2米的区间中,说明我们通过引入多域信道信息更好地表征了多径效应在每一个点的独立特性,进而可以得到更高的定位精度,很好地解决多点指纹定位NLOS场景下的数据异质性分布等问题。
成果产出
研究已形成完整技术框架,发表高水平论文2篇,获发明专利1项。未来将进一步探索室内外一体化定位,推动技术产业化!
[1] B. Wang, Z. Shuai, C. Huang, Q. Yang, Z. Yang, R. Jin, A. A. Hammadi, Z. Zhang, C. Yuen, and M. Debbah, "Multi-sources fusion learing for multi-points NLOS localization in OFDM system," lEEE J. Sel. Topics Signal Process., vol. 18, no. 7, pp.1339-1350, Sept. 2024, doi: 10.1109/JSTSP.2024.3453548.
[2] B. Wang, F. Zhu, M. Liu, C. Huang, Q. Yang, A. Alhammadi, Z. Zhang, and M. Debba, “Multi-sources information fusion learning for multi-points NLOS localization,” in Proc. Veh. Tech. Conf. (VTC), Jun. 2024, pp. 1–6.
文末互动
欢迎有兴趣的小伙伴联系我,在知乎、csdn点赞收藏评论,阅读我的论文、下载我的开源代码🌟🌟。如果觉得对你有帮助,非常感谢引用我的论文!谢谢!
- 想了解更多技术细节?
-
欢迎访问IEEE Explore期刊页面: Multi-Sources Fusion Learning for Multi-Points NLOS Localization in OFDM System | IEEE Journals & Magazine | IEEE Xplore
-
或阅读没有包含公式方法细节描述的精简版中文推文:突破室外非视距多点定位数据异质性瓶颈--AMDNloc通信定位工作开源笔记-精简版 - 知乎
-
-
论文开源代码已发布!
-
代码已提供详细说明,方便下载和运行。欢迎科研 collaborator、毕业论文撰写者等有需求的读者直接参照说明下载运行代码,助力您的科研工作!
-
期待与我联系!
-
我非常欢迎有想法的读者与我合作,分享新的想法、探讨问题或提出建议。如果您有任何疑问想法或合作意向,欢迎联系我的邮箱:bohaowang@zju.edu.cn。期待与您共同探讨进步!
-

















 1821
1821

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









