




HC-SR04超声波传感器实验
一眨眼明天又周一了,虽然今天什么都没干,但还是辛苦我了,至少来发博客了。。
一、HC-SR04介绍
HC-SR04超声波测距模块是依据超声波遇到障碍物发生反射的原理进行测距的。HC-SR04能够产生发射超声波信号,接收并且处理超声波,最后输出一段和发送与接收间隔时间相同的高电平信号,是物联网实验中常用的测距模块之一。
HC-SR04有4个引脚功能如下:
| 管脚 |
定义 |
功能 |
| VCC |
电源 |
3.3-5V |
| Trig |
触发 |
输入触发脉冲 |
| Echo |
回响 |
测距完毕,会产生回响电平 |
| GND |
地 |
地 |
工作时序如下,通过Trig引脚,触发一个10us左右电平,然后模块内部自动会发出8个40KHz的超声波,我们的程序就监控回响引脚Echo,Echo会返回一段高电平持续时间,这个就是超声波从发射到返回的时间。
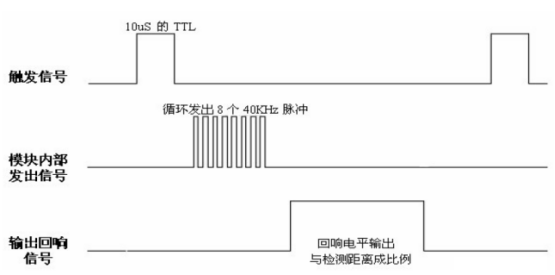
那么我们假设获取到的时间是T,声波在空气中传播速度大概是v=340m/s,我们可以计算单向距离D=T*v/2。
二、控制程序
在了解完HC-SR04的工作原理后,回到我们实验程序,程序最关键的地方在于获取Echo的电平时间,换句话说,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2984
2984

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









