




简介
Codec HDI 提供了基于OpenMax(简称OMX)的一整套编解码接口,程序通过简单的几步,即可实现基于OMX的硬件编解码。本文主要介绍基于Codec HDI 开发的编解码功能,包括初始化,Buffer流转以及释放等。
CODEC HDI框架介绍

Codec HDI Interface (简称HDI)提供基于OpenMax 的标准接口,Media Service 调用这套接口实现硬件编解码能力。HDI 另外提供了实现Callback 机制的接口,Media Service 可以通过HDI 接口创建Callback 信息接收服务端(Codec HDI Callback Remote Service),并且通过SetCallback 方法将对应的客户端代理(Codec HDI Callback Client Proxy)传给OpenMax 实现层,OpenMax 在数据Buffer 处理过程中会通过此代理调用回调方法,告知Media Service 进行对应的数据处理。
目录
./drivers/peripheral/codec
|-- hal #HDI框架代码目录
| |-- include
| |-- src
|-- hdi_service #原HDI框架代码目录
| |-- codec_proxy
| |-- codec_service_stub
| |-- codec_test
|-- interfaces #codec接口头文件
| |-- include
|-- test #unittest 和Demo目录
Codec HDI编解码实例
组件状态流转
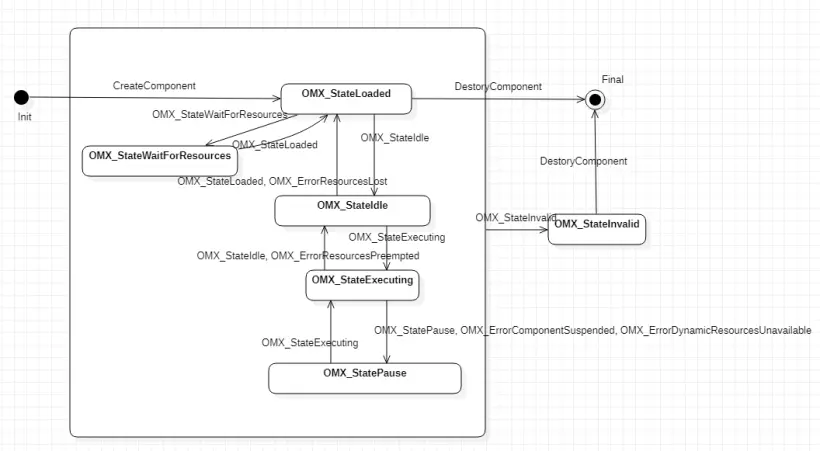
1.通过调用CreateComponent函数,可以打开组件,并让组件进入OMX_StateLoaded 或OMX_StateWaitForResources 状态;
2.通过调用DestoryComponent函数,可以销毁处于OMX_StateLoaded状态的组件实例;
3.其它的状态变化,可以通过SendCommand(OMX_CommandStateSet, <OMX_STATETYPE>)使组件进入相应的状态。
状态 |
描述 |
|---|---|
OMX_StateInvalid |
组件已损坏或者发生一个不能恢复的错误 |
OMX_StateLoaded |
组件已经加载,但是资源未申请 |
OMX_StateIdle |
组件已经申请到所有资源,但不会轮转任何buffer |
OMX_StateExecuting |
组件正在处理有效的数据 |
OMX_StatePause |
组件暂停处理数据,可以通过设置组件状态唤醒重新处理数据 |
OMX_StateWaitForResources |
组件正在等待所需要的 |
编解码流程简介

主要包含以下几步:
- 接口及回调初始化
- 组件初始化
- 设置编解码参数
- 申请输入输出Buffer
- 编解码
- 组件回调处理
- 组件释放
codec HDI编解码主要流程如上图显示,下面我们以解码流程来讲解。
接口及回调初始化
本步骤主要初始化了使用HDI接口必须使用的结构及初始化对应的回调函数。
//初始化HDI ComponentManager实例,用于打开OMX组件
omxMgr_ = GetCodecComponentManager();
//初始化回调
callback_ = CodecCallbackTypeStubGetInstance();
if (!omxMgr_ || !callback_) {
FUNC_EXIT_ERR();
return false;
}
//设置回调函数指针
callback_->EventHandler = &OMXCore::OnEvent;
callback_->EmptyBufferDone = &OMXCore::OnEmptyBufferDone;
callback_->FillBufferDone = &OMXCore::OnFillBufferDone;
组件初始化
组件初始化包含打开对应的编解码组件并获取组件的版本,后续会使用到该版本参数。
//新建组件实例,组件实例为 client_ 后续接口中需要使用 client_
auto err = omxMgr_->CreateComponent(&client_, "OMX.rk.video_decoder.avc", 0, 0, callback_);
if (err != HDF_SUCCESS) {
HDF_LOGE("failed to CreateComponent");
FUNC_EXIT_ERR();
return false;
}
//获取组件版本号
char name[MAX_LEN] = {0};
union OMX_VERSIONTYPE omxVer;
union OMX_VERSIONTYPE omxVerspec;
uint8_t uuid[MAX_LEN] = {0};
uint32_t uuidLen = MAX_LEN; // MAX_LEN = 128
err = client_->GetComponentVersion(client_, name, &omxVer, &omxVerspec, uuid, uuidLen);
if (err != HDF_SUCCESS) {
HDF_LOGE("failed to CreateComponent");
FUNC_EXIT_ERR();
return false;
}
设置编解码参数
设置参数时会使用上一步获取到的版本信息,注意填写。
1.设置输入的宽和高
OMX_PARAM_PORTDEFINITIONTYPE param;
InitParam(param);
param.nPortIndex = (uint32_t)PortIndex::kPortIndexInput;
auto err = client_ 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 324
324

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









