




 本文详细介绍了哈密尔顿蒙特卡洛(HMC)方法,一种改进的Metropolis-Hastings采样策略,通过利用哈密尔顿动力学原理,有效增强参数空间的探索效率,同时保持高接受率。通过模拟物理系统的运动,HMC避免了随机漫步的低效,并展示了在高维概率分布中的应用实例。
本文详细介绍了哈密尔顿蒙特卡洛(HMC)方法,一种改进的Metropolis-Hastings采样策略,通过利用哈密尔顿动力学原理,有效增强参数空间的探索效率,同时保持高接受率。通过模拟物理系统的运动,HMC避免了随机漫步的低效,并展示了在高维概率分布中的应用实例。
哈密尔顿蒙特卡洛(Hamiltonian Monte Carlo)
Metropolis-Hastings 采样方法的一个问题是它会展现出随机漫步式的行为,而随机漫步对参数空间的探索效率并不高——平均来说探索的距离与步数的平方根成正比(n−−√n,参考 Random Walks in 1 dimension)。而简单的扩大步幅又会降低接受率。哈密尔顿蒙特卡洛(HMC)方法提供了一个新思路,即可以提高参数空间的探索效率,又能保持较高的接受率。
哈密尔顿动力学
介绍 HMC 采样方法之前需要先简单说一下哈密尔顿动力学。
哈密尔顿(爱尔兰人 1805-1865)在拉格朗日力学的基础上对经典的牛顿力学做了全新的解释。牛顿力学强调,加速度,作为力作用到物体上的效果,是位置(距离)对时间的二阶导数。引入速度可以把二阶导分解成两个一阶导:速度是位置(距离)对时间的一阶导数,而加速度是速度对时间的一阶导数。
考虑地球引力与物体组成的动力系统。每个单位重量(m=1m=1)的物体在高度为 hh 的地方具有势能(potential energy) Ep(h)=mgh=ghEp(h)=mgh=gh,其中 gg 为加速度,也是重力,且 g=∂Ep∂hg=∂Ep∂h。在物体自由落体的时候(忽略空气阻力等其他因素),物体的速度对时间的导数也是 gg,即 dvdt=gdvdt=g。所以速度对时间的导数等于势能对位置(高度)的导数:dvdt=∂Ep∂hdvdt=∂Ep∂h。
而单位重量(m=1m=1)的物体运动中的动能(kinetic energy)为 Ek(v)=mv22=v22Ek(v)=mv22=v22,动能对速度的导数是 ∂Ek∂v=v∂Ek∂v=v。同时速度又是位置(高度)对时间的导数 dhdt=−vdhdt=−v,其中负号表示反向(速度增加对应高度降低)。所以位置(高度)对时间的导数等于反向的动能对速度的导数 dhdt=−∂Ek∂vdhdt=−∂Ek∂v。
考虑势能和动能组成的能量系统:H(h,v)=Ep(h)+Ek(v)H(h,v)=Ep(h)+Ek(v),其中 HH 是哈密尔顿函数。上面的微分等式可以使用哈密尔顿函数重新表述为:
dvdtdhdt=∂Ep∂h=∂H∂h=−∂Ek∂v=−∂H∂vdvdt=∂Ep∂h=∂H∂hdhdt=−∂Ek∂v=−∂H∂v
上面即是哈密尔顿等式。
在系统的演化过程中(物体降落),哈密尔顿函数的值是不变的:
dHdt=∂H∂hdhdt+∂H∂vdvdt=−∂H∂h∂H∂v+∂H∂v∂H∂h=0dHdt=∂H∂hdhdt+∂H∂vdvdt=−∂H∂h∂H∂v+∂H∂v∂H∂h=0
可以理解为物体增加的动能等于减少的势能,即能量守恒。
哈密尔顿等式中的 hh 和 vv 是联动且一一对应的,而 (h,v)(h,v) 组成的空间称为相空间(phase space)。一个物体的下落过程在 (h,v)(h,v) 相空间中表现为一个等值曲线(哈密尔顿函数值)。不同的初始设定 (h0,v0)(h0,v0) 确定了不同的等值曲线(当然对应不同的哈密尔顿函数值)。
动力系统与概率分布
上面的动力学和概率分布有什么关系呢?如果用相空间上的位置 hh 表示目标分布 p(z)p(z) 的变量 zz(后面的位置都用 zz 表示),希望可以设计一个合适的动力系统来遍历相空间,使得遍历(采样)得到的点 (z0,v0),(z1,v1),…,(zn,vn)(z0,v0),(z1,v1),…,(zn,vn) 中的 zizi 符合目标分布。
下面来看设计思路。
首先,(任何)概率分布 p(z)p(z) 都可以重新表示为 1Zpexp(−(−log(p(z))))1Zpexp(−(−log(p(z))))。设 E(z)=−log(p(z))E(z)=−log(p(z)),则 p(z)=1Zpexp(−E(z))p(z)=1Zpexp(−E(z)),其中 E(z)E(z) 可以理解为势能。
接下来引入动能 K(v)=v22K(v)=v22,和对应的概率分布 p(v)=1Zkexp(−K(v))p(v)=1Zkexp(−K(v))。
设哈密尔顿函数是 H(z,v)=E(z)+K(v)H(z,v)=E(z)+K(v),则由 zz 和 vv 组成的联合分布可以表示为:
p(z,v)=p(z)p(v)=1ZHexp(−(E(z)+K(v)))=1ZHexp(−H(z,v)).p(z,v)=p(z)p(v)=1ZHexp(−(E(z)+K(v)))=1ZHexp(−H(z,v)).
如果能以符合 p(z,v)p(z,v) 分布的方式对相空间 (z,v)(z,v) 遍历(采样),那得到的 zizi 将符合 zz 的边际分布,也是目标分布 p(z)p(z)。
采样
对 p(z,v)p(z,v) 的采样可以借鉴 Metropolis 方法:
- 选取初始样本 (zi,vi)(zi,vi)
- 执行提议过程(要求对称)得到 (z∗,v∗)(z∗,v∗)
- 以 min(1,p(z∗,v∗)p(zi,vi))min(1,p(z∗,v∗)p(zi,vi)) 的概率接受 (zi+1,vi+1)=(z∗,v∗)(zi+1,vi+1)=(z∗,v∗)
- 否则 (zi+1,vi+1)=(zi,vi)(zi+1,vi+1)=(zi,vi)
- 重复第 2 步
HMC 与 Metropolis 所不同的就是对新样本的提议过程。HMC 通过对动力系统的模拟演化来提议新样本,即以 (zi,vi)(zi,vi) 为初始状态,按照哈密尔顿等式,通过固定时间(固定步数)的迭代得到 (z∗,v∗)(z∗,v∗)。理论上,哈密尔顿等式保证了 HH 是恒定的,p(z∗,v∗)=p(zi,vi)p(z∗,v∗)=p(zi,vi),新样本必然会被接受。也正是这个特性保证了 HMC 较高的接受率。但在实际的计算过程中是通过离散的方法模拟连续的过程,必然会出现误差,所以依然使用 Metropolis 方法来判断是否接受新样本,以此来保证所有样本符合 p(z,v)p(z,v) 分布。
对哈密尔顿等式的计算通常采样“青蛙跳(leapfrog)”的方法模拟:
vˆ(t+ϵ/2)zˆ(t+ϵ/2)vˆ(t+ϵ)=vˆ(t)+ϵ2∂E∂z(zˆ(t))=zˆ(t)−ϵ∂K∂v(vˆ(t+ϵ/2))=zˆ(t)−ϵvˆ(t+ϵ/2)=vˆ(t+ϵ/2)+ϵ2∂E∂z(zˆ(t+ϵ))v^(t+ϵ/2)=v^(t)+ϵ2∂E∂z(z^(t))z^(t+ϵ/2)=z^(t)−ϵ∂K∂v(v^(t+ϵ/2))=z^(t)−ϵv^(t+ϵ/2)v^(t+ϵ)=v^(t+ϵ/2)+ϵ2∂E∂z(z^(t+ϵ))
jun add::这里的推导是根据一阶泰勒展开和上文中的dv/dt = dH/dh (对h的偏导,这里不好打格式)
,其中 ϵϵ 表示步幅系数。上面是一个完整的步骤,而模拟过程通常是循环固定的次数(LL,可调整的参数)。这个步骤简单解释起来是 vv 先前进半步(ϵ2ϵ2),然后 zz 前进一步(ϵϵ),最后 vv 再前进半步(ϵ2ϵ2)。在循环多次的情况下,上一次最后对 vv 的调整可以和下一次开头对 vv 的调整合并为一步。
Metropolis 方法要求提议的过程的对称的,这个可以通过随机采用 ϵϵ 或者 −ϵ−ϵ 来保证,即在相空间中是正向前进还是反向前进。“青蛙跳”的过程保证,从 (zi,vi)(zi,vi) 正向前进到 (z∗,v∗)(z∗,v∗) 后,反向经过相同的步数可以准确回到 (zi,vi)(zi,vi)。(满足 detailed balance 的证明过程可以参考 PRML 11.5.2)
遍历
上面的过程保证了较高的接受率,但是提议过程并不完整。因为给定初始的 (z0,v0)(z0,v0) 后,后续的样本都保持 H(zi,vi)H(zi,vi) 恒定,也就是 p(zi,vi)p(zi,vi) 是固定的。这样显然不能遍历整个的 p(v,v)p(v,v) 分布。
解决办法是,在下次执行哈密尔顿模拟过程之前,从条件分布 p(v′i∣zi)p(vi′∣zi) 中采样出一个新的 v′ivi′,以 (zi,v′i)(zi,vi′) 作为下次模拟过程的初始点。这个过程实际是选择了一个不同 HH 值,也就选择了一个不同的等值曲线。
像 Gibbs 方法一样,从条件分布中采样并没有破坏 p(z,v)p(z,v) 分布。而由于 p(z,v)p(z,v) 中 zz 和 vv 是相互独立的,p(v∣z)=p(v)p(v∣z)=p(v),所以可以直接从 p(v)p(v) 采样。实际上根据上面对动能 K(v)K(v) 的定义,可以直接从标准的高斯分布中采样 Normal(0,1)Normal(0,1)。
所以总结起来,HMC 的提议过程分两步:
- 从 p(v∣z)=p(v)p(v∣z)=p(v) 中采样出 v′ivi′
- 与上一次的 zizi 组成新的初始点 (zi,v′i)(zi,vi′),然后运行一定次数的“青蛙跳”,得到提议的样本 (z∗,v∗)(z∗,v∗)
有了 (z∗,v∗)(z∗,v∗) 接下再执行依据 min(1,⋯)min(1,⋯) 概率的选择过程。
上面提议过程的步骤里,一个是从条件分布里采样,另一个是 Metroplis 过程,都没有改变 p(z,v)p(z,v) 分布。虽然这可以理解为依据上面的步骤得出的样本符合目标分布,但是如果能够证明这两步作为一个整体满足 detailed balance 条件,就能更好的理解这个方法。以后会跟进分析。
例子
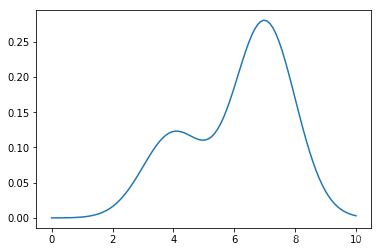
例子中的目标分布是一个高斯混合分布,中心点分别在 4 和 7,权重分别是 0.3 和 0.7。例子使用 PyTorch 实现,因为 PyTorch 提供了比较方便的计算梯度的方法。
完整的实现在 Hamiltonian-Monte-Carlo-import.ipynb 文件中,下面只列出了关键的步骤。
In [4]:
%%capture %run Hamiltonian-Monte-Carlo-import.ipynb
定义目标概率分布:
In [2]:
def ptilde(x):
return 0.3 * normpdf(x, mean=torch.tensor(4.0), scale=torch.tensor(1.0)) + 0.7 * normpdf(x, mean=torch.tensor(7.0), scale=torch.tensor(1.0))
下面看一下目标分布的密度函数曲线:
In [5]:
x = th.tensor(np.linspace(0, 10, num=100)) y = x.clone().apply_(ptilde) plt.plot(np.array(x), np.array(y))
Out[5]:
[<matplotlib.lines.Line2D at 0x1159108d0>]
在引入动能之后,p(z,v)p(z,v) 的分布的等值曲线是这样的:
In [11]:
levels = np.arange(0,0.3,0.015) contour(xx, yy, zs, levels=levels)
Out[11]:
<matplotlib.contour.QuadContourSet at 0x11563aa90>
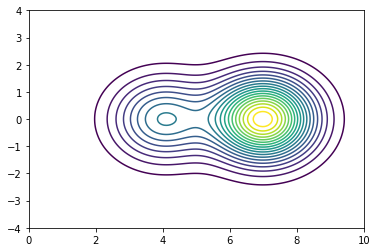
右边紧密排列的圆是高密度区域。
然后定义在 p(z,v)p(z,v) 中采样的过程。
首先是青蛙跳的步骤。这里已经把中间步骤里前后两次对 vv 的半步前进合并成一步前进:
In [7]:
def leapfrog2(z, r, e=torch.tensor(0.001), L=100):
if randint(1,2) == 1:
e = -e
z.requires_grad_(True)
E = -torch.log(ptilde(z))
E.backward()
rhalf = r - 0.5 * e * z.grad
rnext = rhalf
znext = z
for _ in range(L):
with torch.no_grad():
znext = znext + e * rnext
znext.requires_grad_(True)
E2 = -torch.log(ptilde(znext))
E2.backward()
with torch.no_grad():
rnext = rnext - e * znext.grad
with torch.no_grad():
rnext = rnext + 0.5 * e * znext.grad
return znext, rnext
然后是采样步骤:
In [8]:
def hmc2():
n = 5000
zs = []
rs = []
z0 = torch.tensor(4.0)
for _ in range(n):
r0 = torch.randn(1)
zn, rn = leapfrog2(z0, r0, e=torch.tensor(0.15), L=20)
nH = Hamilton(zn, rn)
oH = Hamilton(z0, r0)
if random.random() <= torch.exp(nH - oH):
z0 = zn
zs.append(z0.item())
_ = hist(zs, bins=150)
采样结果,z 的直方图:
In [9]:
hmc2()
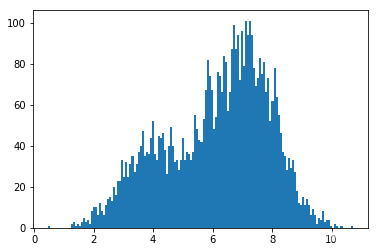
大致符合目标分布。下面跟其他实现方式比较一下。
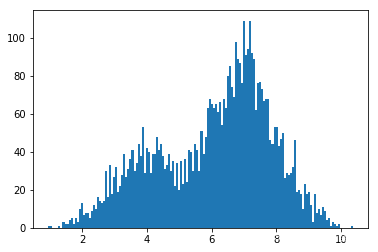
首先是 Metropolis 方法:
In [12]:
metropolis()
然后是 PyMC3 提供的 HMC 方法:
In [13]:
pymc3_hmc()
100%|██████████| 5500/5500 [00:02<00:00, 2058.43it/s]
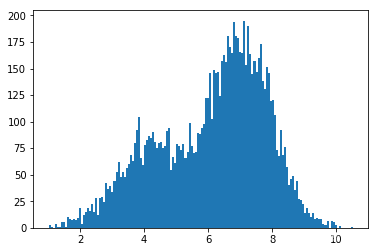
可以看到上面实现的 HMC 方法还是基本得到了正确的分布。
讨论
但是 HMC 引入额外的维度(参数,也就是动能)的意义是什么,为什么它能提高参数空间的探索效率?
下面先看一下连续的几次采样过程,包括青蛙跳的轨迹(下面 Traj 类的第二个参数是初始的 zz 值):
In [16]:
%%capture fig, ax = plt.subplots() levels = np.arange(0,0.3,0.015) ax.contour(xx, yy, zs, levels=levels) traj = Traj(ax, 4.0) anim = FuncAnimation(fig, traj, frames=np.arange(200), init_func=traj.init, interval=200, blit=True)
In [17]:
anim
Out[17]:
首先可以看出,青蛙跳的轨迹确实是沿着等值密度线前进。另外,在密度较高的地方,前进的步幅较小。还有,在右面密度最高的区域里,这些等值线与左边区域没有联通,所以落在这些圆上的点在青蛙跳之后依然会留在附近。这些都保证了 p(z)p(z) 大的地方得到更多的样本。
回到上面额外维度的问题。引入额外维度的意义在于可以实现飞跃,即不必受限于原有空间的沟沟坎坎而可以轻松的从 A 地到 B 地。如果跟飞机比的话,地上的火车可以认为是在二维的空间中前行。而有了飞机之后其实是增加了一个维度,可以不再受地面上各种条件的限制,可以实现(在地面看来)快速无痕迹的从 A 地到 B 地。
结合到上面的例子可以看出,如果初始点是在 p(z)p(z) 较低的地方,HMC 会以较大的步幅前进,快速的离开。
另外,哈密尔顿等式的应用保证了 HH 基本恒定,新提议的样本会以较高的概率被接受。
遗留的问题是,提议过程的两个步骤(条件分布采样和青蛙跳+Metropolis过程)作为一个整体是如何满足 detailed balance 条件的。这个问题以后会继续分析。

















 1290
1290

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









